Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы с фиксированным шагом
Хотя euler, linsim, rk23 и rk45 методы с переменным шагом, их можно преобразовать к методам с фиксированным шагом установкой минимального размера шага равным максимальному. Методы adams и gear могут принимать неопределенное количество точек между выходными сигналами, следовательно, не могут быть преобразованными к методам с фиксированным шагом. Максимальный и минимальный размер шага для adams и gear используется чтобы управлять выводом точек для вычерчивания результирующего графика, на точность этих методов минимальная и максимальная величина шага не влияют.
Эффективный размер шага
Методы интегрирования обращаются к модели для взятия производной на каждом шаге. Вычисляется состояние производных и выходного сигнала в каждой точке времени. Главный шаг состоит из некоторого числа обращений к модели для взятия производных, которые используются для генерирования точек выходного сигнала. Только методы linsim и euler требуют одного вызова для взятия производной на точку выходного сигнала. Для других методов интегрирования могут быть взяты шаги меньшие, чем минимальный размер, поскольку шаг интегрирования разбивается. Для rk45, для каждой выводимой точки берется шесть шагов с коэффициентами [0, 1/2, 1/4, 3/8, 12/13, 1]. Для rk23 берутся три шага с коэффициентами [0, 1/2, 1]. Функции adams и gear использующие методы прогнозирования коррекции, принимают различное количество шагов между выводимыми точками. Следует отметить, что процедура интегрирования часто возвращаются обратно во времени, когда обнаруживается, что допустимые параметры превосходят оценку локальной ошибки. Наиболее часто это случается когда в системе имеются разрывы. 5. Системы дискретного времени.
Simulink способен моделировать дискретные системы. Модели могу быть многоуровневыми. Модели могут составляться или исключительно из дискретных блоков или могут быть гибридными, т.е. содержащими дискретные и непрерывные блоки вместе.
Дискретные блоки
Каждый из дискретных блоков на своем входе имеет встроенное устройство стробирования и фиксатор нулевого уровня выходного сигнала. Когда дискретные блоки смешиваются с блоками непрерывного сигнала выходной сигнал между тактами дискретных блоков остается постоянным. Входные сигналы на дискретных блоках обновляются только в моменты, которые соответствуют тактовым импульсам.
Образцовое время
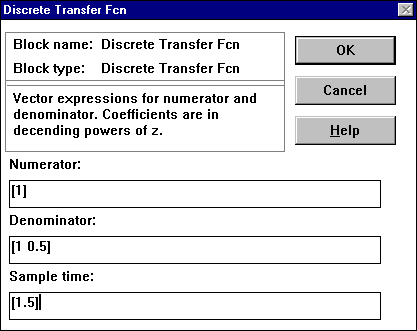
Образцовый период дискретных блоков устанавливается в поле Sample Time (Образец времени) окна диалога блока. Это поле устанавливает величину периода за который обновляется состояние дискретного блока. Обычно образцовый период устанавливается в скалярной переменной, однако, есть возможность назначить сдвиг времени указанием двухэлементного вектора в этом поле. Пример показан в диалоговом окне дискретной передаточной функции:
Вектор [Ts, offset] устанавливает период в Ts и значение сдвига в offset. Дискретный блок обновляется на целых значениях периода и только сдвигает значения: t = n * Ts + offset где n целое, а offset может быть положительным и отрицательным, но не больше чем образцовый период. Offset обычно используется если некоторые дискретные блоки должны обновляться скорее или позднее, чем другие.
Полностью дискретные системы
Полностью дискретные системы могут моделироваться используя любой алгоритм интегрирования, в решениях отличий нет. Чтобы точки выходного сигнала генерировались по тактам дискретной схемы, следует установить минимальный размер шага в значение большее, чем максимальное время такта.
Смешанные системы (непрерывные и дискретные)
Смешанные (непрерывные и дискретные) системы составляются из блоков как с дискретными так и непрерывными сигналами. Такие системы могут моделироваться любым методов интегрирования, хотя, некоторые методы могут быть более эффективны и точны, чем другие. Для большинства смешанных систем метод Рунге-Кутта с переменным шагом (rk23 и rk45), лучше других по производительности и точности. Из-за разрывов связанных с квантованием и фиксацией дискретных блоков, функции gear и adams не рекомендуются для смешанных систем.
6. Линеаризация
Simulink предусматривает функции linmod и dlinmod, чтобы извлекать линейные модели в форме матриц пространств-состояний A, B, C и D. Матрицы пространств-состояний описывают линейную зависимость вход-выход как
где x, u и y векторы состояний, входа и выхода соответственно. То есть по структурной схеме строится система уравнений.
Имитационное моделирование.
1. Сущность имитационного моделирования.
Почему необходим двойной термин «имитационное моделирование». Слова имитация и моделирование являются почти синонимами. Фактически все расчетные методы на ЭВМ во всех областях науки и техники являются моделями реальных процессов. Чтобы отличить математические модели друг от друга, исследователи стали давать им дополнительные названия. Термин «имитационное моделирование» означает, что мы имеем дело с такими математическими моделями, с помощью которых результат нельзя заранее вычислить или предсказать, поэтому для предсказания поведения реальной сложной системы необходим эксперимент (имитация) на модели при заданных исходных данных. Имитация представляет собой численный метод проведения на ЭВМ экспериментов с математическими моделями, описывающими поведение сложных систем в течение заданного времени. Поведение компонент сложной системы (СС) и их взаимодействие в имитационной модели чаще всего описывается набором алгоритмов, реализуемых на некотором языке моделирования. Все эти описания представляют собой программную имитационную модель, которую необходимо сначала отладить и испытать, а затем использовать для постановки эксперимента на ЭВМ. Поэтому под процессом имитации на ЭВМ понимают: 1. конструирование модели; 2. испытание модели; 3. применение модели для изучения некоторого явления или проблемы. При построении имитационной модели исследователя интересует прежде всего возможность вычисления некоторого функционала, заданного на множестве реализаций процесса функционирования изучаемой сложной системы и характеризующего поведения объекта имитации. Наиболее важным для исследователя функционалом является показатель эффективности системы. Имитируя различные реальные ситуации на имитационных моделях, исследователь получает возможность решения следующих задач: 1. оценка эффективности различных принципов управления системой; 2. сравнение вариантов структуры системы; 7. определение степени влияния изменений параметров системы и начальных условий имитации ее поведения на показатель эффективности системы.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 215; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.233.97 (0.009 с.) |