
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расстояние между двумя точками. Деление отрезка в данном отношении.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
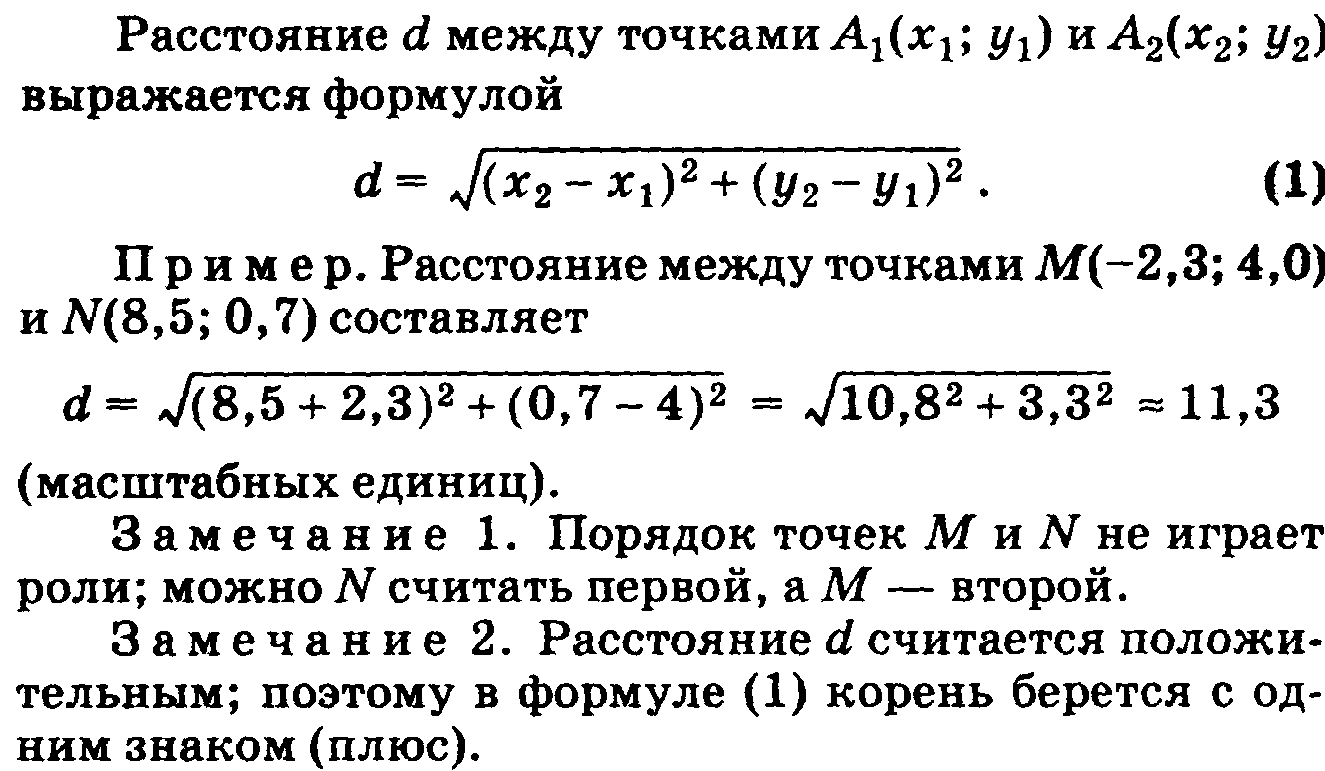
Расстояние между двумя точками. Деление отрезка в данном отношении.
Деление отрезка в данном отношении.
3.Понятие об ур-нии линии.
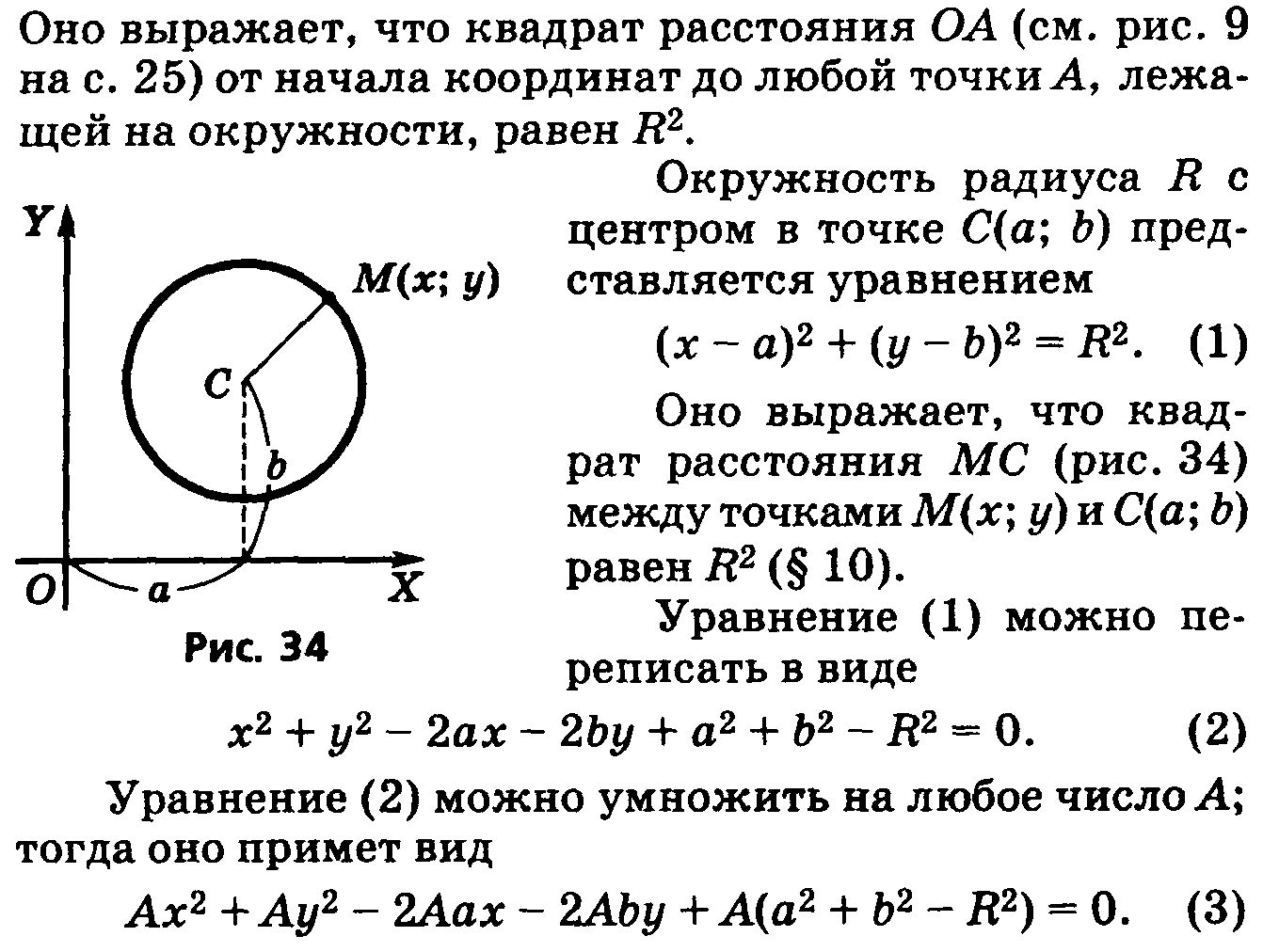
Определение окружности и ее определение. Окружность радиуса R с центром в начале координат представляется уравнением
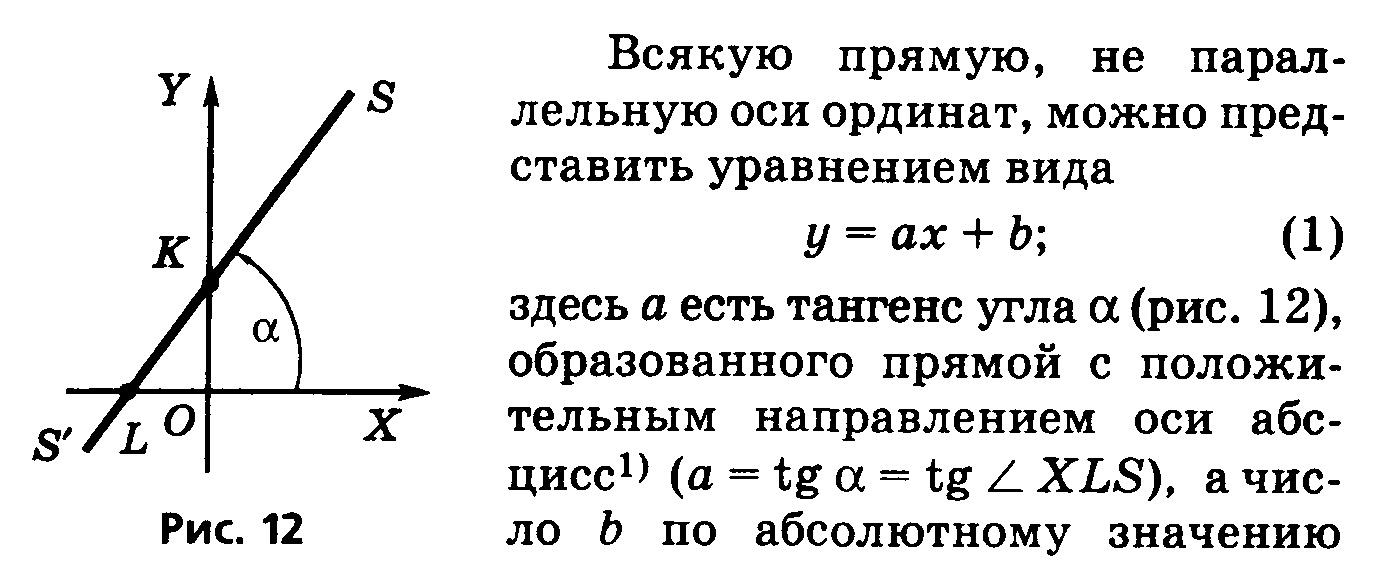
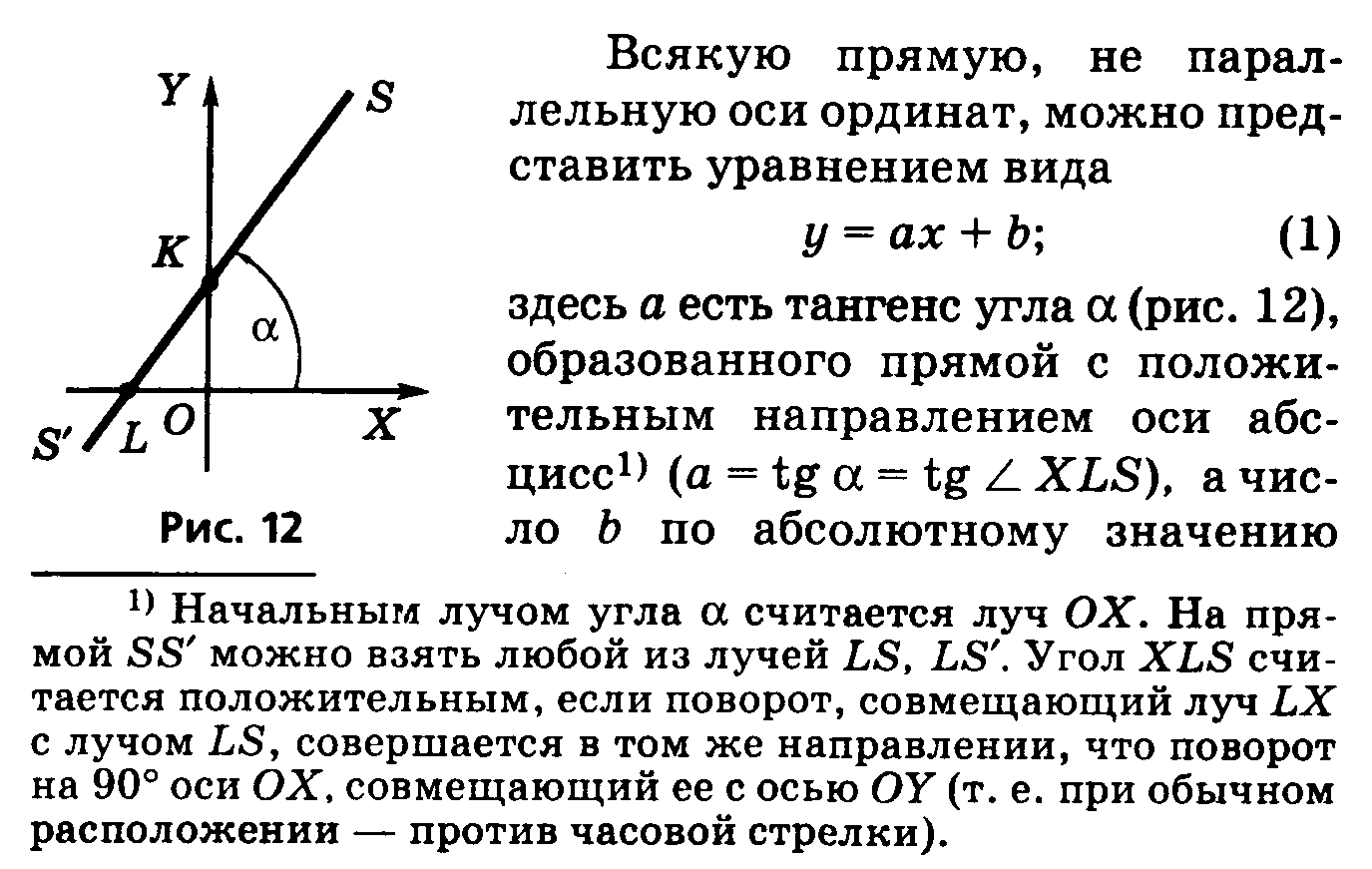
Уравнение прямой с угловым коэффициентом
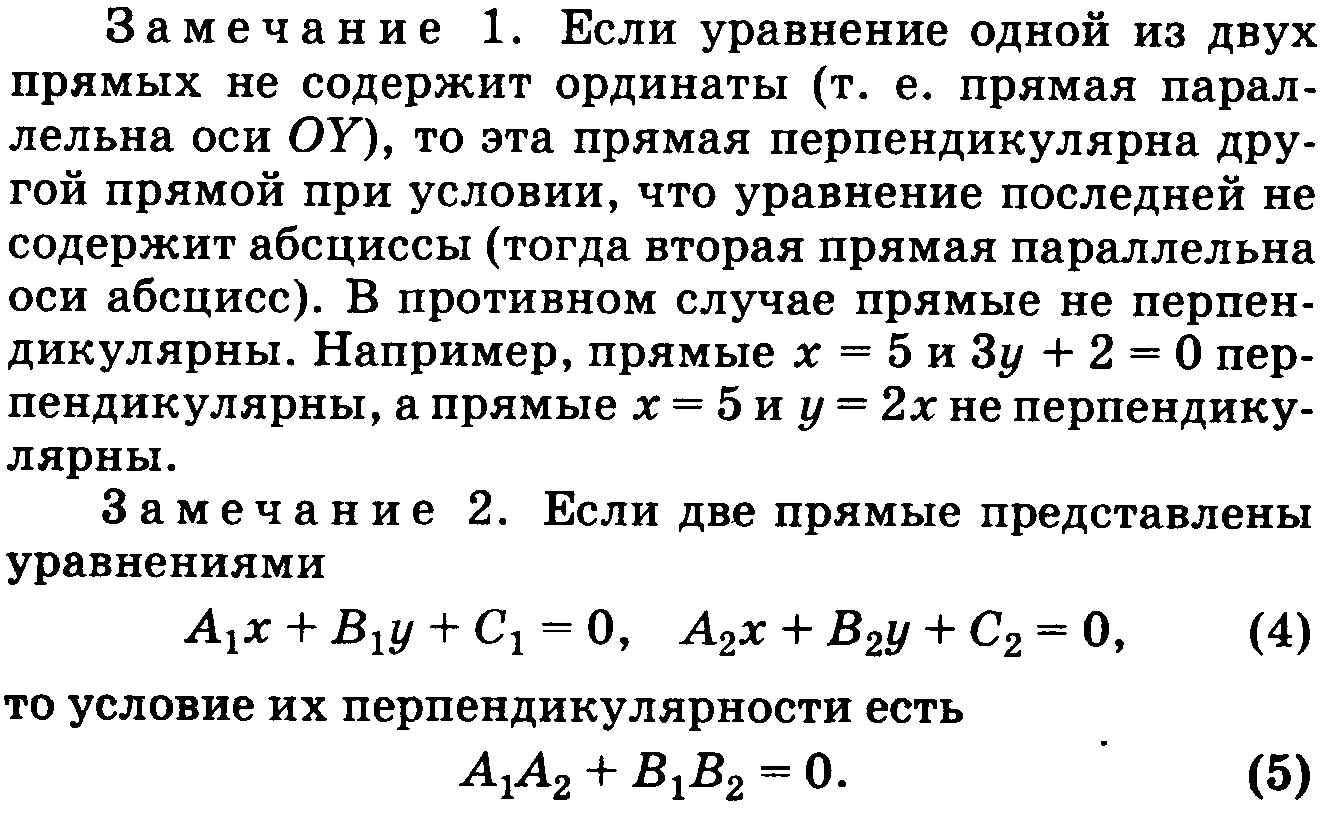
5.Общее уравнение прямой.
Метод обратной матрицы решения системы алгебраических уравнений. m = n, det A ≠ 0 A×X = B Умножаем систему 2 слева на матрицу А-1 А-1 × А × Х = А-1 × В Е × Х = А-1 × В Х = А-1 × В 6.Ур-ние прямой, проходящей через 2 точки. Ур-ние прямой в отрезках.
Скалярные и векторные велечины. Сложение, вычетание векторов, умножение вектора на число.
15.Общее уравнение плоскости: Ах + Ву + Сz + D=0, где ABCD- некоторые числа, причем A2+B2+C2>0. 1. Уравнение плоскости по точке и нормальному вектору: M0M перпендикулярно 2. Уравнение плоскости в отрезках на осях: Ax+By+Cz =D, - 3.Уравнение плоскасти по трем точкам: 0=[M1M, M1M2, M1M3]- компланарные, M1M=(x-x1, y-y1, z-z1), M1M2=(x2-x1, y2-y1, z2-z1), M1M3=(x3-x1, y3-y1, z3-z1).
Угол между плоскостями: A1x + B1y + C1z + D1 = 0, A2x + B2y + C2z + D2 = 0.
Плоскости будут параллельны, если вектора калиниарны: n1⃓⃓ n2 ó A1x + B1y + C1z + D1=0. Плоскости перпендикулярны, когда вектора ортогональные:
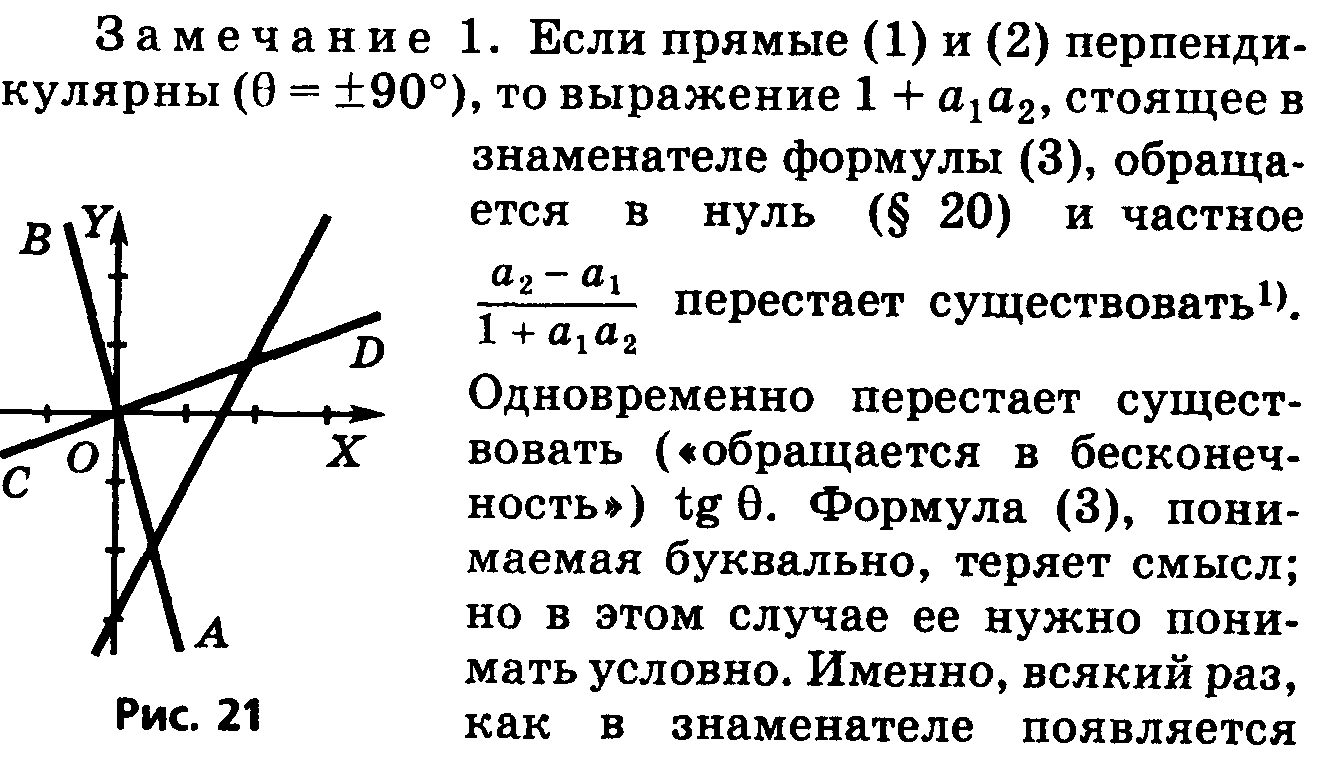
Угол между 2-мя прямыми. Условия параллельности и перпендикулярности.
Угол между 2-мя векторами. Угол между векторами a1{X1;Y1;Z1},a2{X2;Y2;Z2} можно найти по формуле
Условие коллинеарности: Векторы назыв коллинеарными если они || одной плоскости Если векторы a1{X1;Y1;Z1},a2{X2;Y2;Z2} коллинеарны, то их соответствующие координаты пропорциональны X2: X1= Y2: Y1= Z2: Z и обратно. Если коэффициент пропорциональности положителен, то векторы равнонаправлены, если отрицателен, то – противопол направ. Условие компланарности: Три вектора назыв компланарными, если они, будучи приведены к одному началу, лежат в одной плоскости Условие (необходимое и достаточное) компланарности векторов a1{X1;Y1;Z1}, a2{X2;Y2;Z2},a3{X3;Y3;Z3}:
8. Кривые второго порядка (эллипс, парабола, гипербола) Парабола и ее свойства.
Множество точек плоскости, координаты которых по отношению к системе декартовых координат удовлетворяет уравнению y=ax2, где х и у - текущие координаты, а- нек. число, наз. параболой.
y2=2px-симметрично отн. оси ОХ х2=2pу-симметрично отн. оси ОУ Точка F(p/2,0) наз. фокусом параболы, а прямая x=-p/2 - ее директриса. Любой точке М(х,у), принадлежащей параболе, расстояние до фокуса = r=p/2 Св-ва: 1. парабола предст. собой ¥ точек плоскости, равноотстающих от фокуса и от директрисы y=ax2.
Эллипс и его св-ва: Кривая второго порядка наз. эллипсом если коэффициенты А и L имеют одинаковые знаки Аx2+Cy2=d ур.-е наз. канонич. ур.-ем эллипса, где
Точки F1(-c,0) и F2(c,0) - наз. фокусами эллипса а. Отношение e=с/а наз. его эксцентриситетом (0<=e<=1) Точки A1,A2,B1,B2 -вершины эллипса. Св-во:
Гипербола и ее св-ва. Кривая 2го порядка наз. гиперболой, если в ур-ии Ax2+Cy2=d, коэффициент А и С имеют противоположные знаки, т.е. А*С<0 б) Если d>0, то каноническое ур-е гиперболы примет вид: x2/a2-y2/b2=1, F1(c,o) и F2(-c,0) - фокусы ее, e>0, e=c/a - эксцентриситет. Св-во: б) если d=0, ур-е примет вид x2/a2-y2/b2=0, получаем 2 перекрестные прямые х/а±у/b=0 в) если d<0, то x2/a2-y2/b2=-1 - ур-е сопряженной гиперболы.
Проекция вектора на ось Выражение «проекция вектора АВ на ось ОХ» употребляется в двух разных смыслах: геометрическом и алгебраическом (арифметическом). 1. Проекцией (геометрической) вектора АВ на ось ОХ называется вектор А'В', начало которого А' есть проекция начала А на ось ОХ, а конец В' — проекция конца В на ту же ось. Обозначение: Прох АВ или, короче, Пр АВ. Если ось ОХ задана вектором с, то вектор А'В' называется также проекцией вектора АВ на направление вектора с и обозначается Прс АВ. Геометрическая проекция вектора на ось ОХ называется также компонентой вектора по оси ОХ. 2. Проекцией (алгебраической) вектора АВ на ось ОХ (или на направление вектора с) называется длина вектора А'В', взятая со знаком + или -, смотря по тому, имеет ли вектор А'В' то же направление, что и ось ОХ (вектор с), или противоположное.
Обозначение: прох АВ или прс АВ. Замечание. Геометрическая проекция (компонента) вектора есть вектор, а алгебраическая проекция вектора есть число. Основные теоремы о проекциях вектора Теорема 1. Проекция суммы векторов на какую-либо ось равна сумме проекций слагаемых векторов на ту же ось. Теорема справедлива при обоих смыслах термина «проекция вектора» и при любом числе слагаемых; так, при трех слагаемых Пр ( а1 + а2 + а3) = Пр а1 + Пр а2 + Пр а3 (1) и np(а1 + а2 + а3) = пра1 + пра2 + пра3. (2) Теорема 2. Алгебраическая проекция вектора на какую-либо ось равна произведению длины вектора на косинус угла между осью и вектором: пр. b = |b| cos (а^b). (3)
12.Операции над векторами: 1.Произведение вектора ā на число назыв вектор α*ā, модуль которого = |α|*|ā|, а направление совпадает с направлением вектора ā если α > 0 и противоположны ему если α<0 2.Анологичное правило для деления
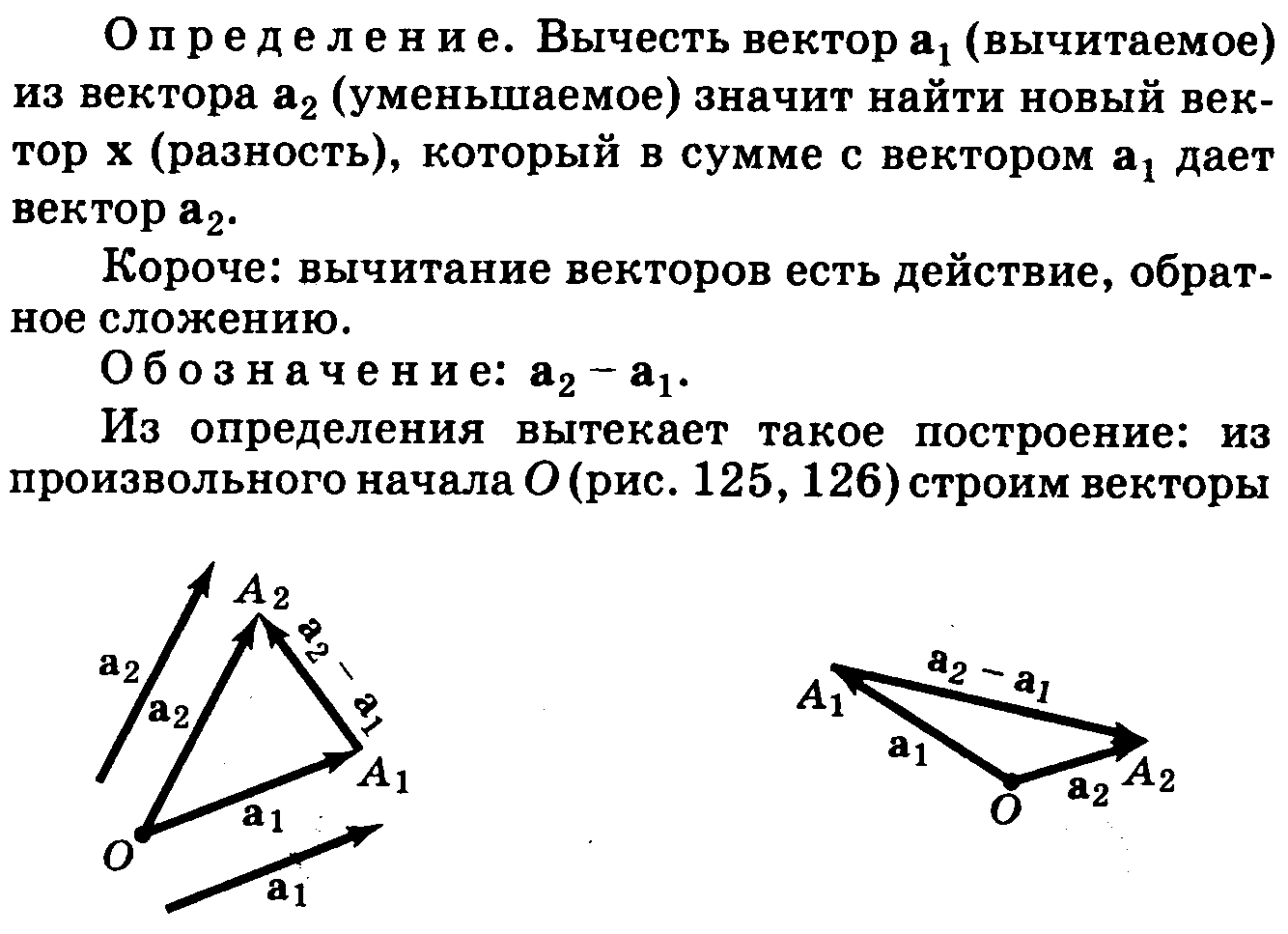
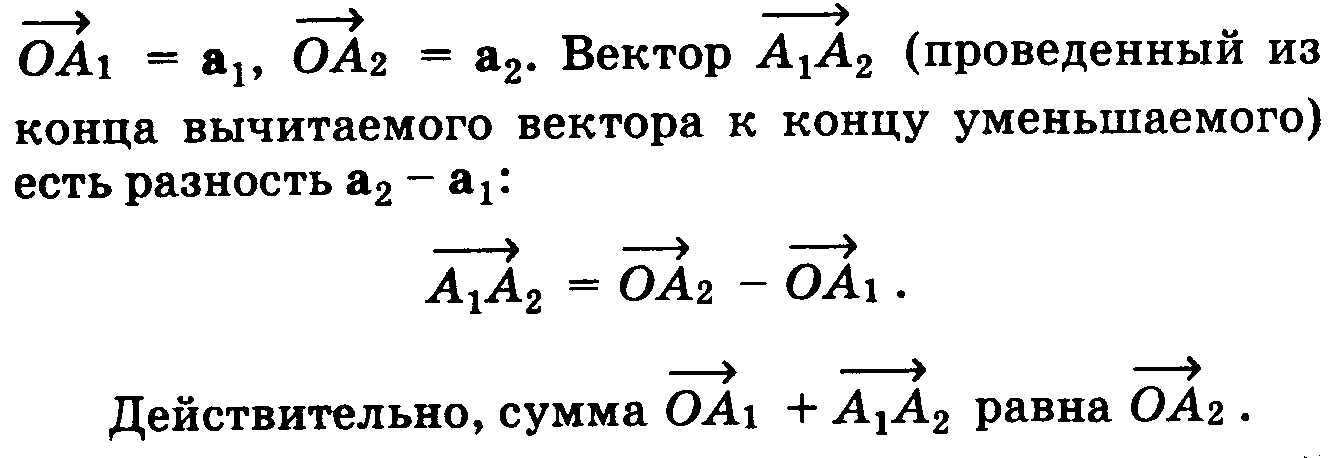
4.Анологичное правило для вычитания
Решение методом Крамера Метод решения систем лин. Уравнений методом Крамера: Рассмотрим систему. Пусть m=n,пусть матрица системыА-не вырождена det A≠0. Тогда система имеет единств. Решение, кот. Определяется по формулам Крамера: хi= Пример: X=s w:val="10"/></w:rPr><m:t>3</m:t></m:r></m:e></m:mr></m:m></m:e></m:d></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>"> △ X1= X3=
Произв. Сложной и обр. ф-ции. Табл. Производных. Производная сложной ф.:Если
 - взимно-обратые дифференцируемые ф-ции и - взимно-обратые дифференцируемые ф-ции и  ,то ,то  Действительно,т.к. Действительно,т.к.  ,то ,то 
Таблица производной
Рассм. Ф-ию y=f(x), имеющую произв. в каждой точке ее обл. опр-я. Диф-лом ф-и y=f(x) наз. произведение произв-й этой ф-и на приращение независ. переменной х Диф-л независ. переем-й равен приращению этой переменной, поэтому диф-л ф-и равен произведению ее производной на диф-л незав. перем-ой.Геометр. смысл: диф-л ф-и равен приращению ординаты касательной к граф. Данной ф-и, когда аргумент получает приращение дельта х. Бесконечно малое приращение ф-и эквивал. диф-лу этой ф-и при всех знач. незав. перем-ой, для кот-х произв-я ф-и конечна и отлична от нуля.f(x+дельтах)прибл.=f(x)+f’(x)*дельтаХ. Эта ф-ла позволяет вычислять прибл. знач-е ф-и, соотв-ее приращ-му знач. аргумента, если известно ее знач. в этой т. и знач. производной в этой т., когда приращение арг-та достаточно мало.
38.Теорема Ферма и Роля. Теорема Ферма: Если функция f(x) определена на интер(а, b) и в некот.точке x0 этого интервала имеет наибольшее или наименьшее значение, тогда если в точке х0 существует производная, то она равна нулю.
Теорема Роля: Если функция y=f(x) непрерывна на отрезке [a, b] и дифференцируема внутри этого отрезка, причем f(a)=f(b), то существует по крайней мере одна точка x=c, принадлежащей отрезку (a, b), такая, что f’(c)=0 (касательная // OX)
39. Теорема Лагранжа: Если функция y=f(x) непрерывна на отрезке [a, b] и дифференцируема внутри этого отрезка, то существует по крайней мере одна точка с, принадлежащая отрезку (а, b), для которой справедлива формула: f(b)-f(a)/(b-a)=f”(c).Эта формула наз. Формулой конечных приращений Лагранжа.
40. Правило Лопиталя. Исп. при вычис.пределов для раскрытия неопредел.( Пример: lim sinx/x=lim (sinx)’/x’=lim cosx/1=1.
Теорема 1. В точке экстремума дифференцируемой функции все ее первые частные производные равны нулю,если Теорема 2. Пусть функция z=/(х,у) имеет непрерывные частные производные до второго порядка включительно в некоторой окрестности точки М0(а, b). Если ее первые частные производные в точке М0 равны нулю, а вторые принимают значения
То при
точка М0 является точкой минимума данной функции, а при В2-АС<0, А<0 точкой максимума, при В2-АС>0 в точке М0 экстремума нет.
47.Метод наименьших квадратов При обработке опытных данных часто встречаются с задачей об определении параметров функциональной зависимости между переменными величинами x и y посредством формулы y=f(x).Эта задача решается с помощью метода наименьших квадратов, сущность которого состоит в следующем. При измерении двух величин x и y получены следующие данные:
Известен также вид функциональной зависимости, т.е. y=f(x, где f-заданная функция;
Значения параметров
u= принимала наименьшее значение. Поскольку эта функция - сумма квадратов некоторых чисел, она принимает неотрицательные значении (каждое слагаемое суммы неотрицательно). Функция (3) является функцией т+1 переменых и=и( Если функция и=и(
Из этой системы т +1 уравнений находятся искомые значения параметров a0 ,a1,...,am. Во многих случаях функция (1) определяется формулой y= где Функция (4) в таких случаях принимает вид u= а система (5) запишется так:
…………………………………….
Решение этой системы может быть получено с помощью метода Гаусса (метод последовательного исключения неизвестных). Если f (x, + и система (8) принимает вид:
*
Теорема Если подынтегральная функция непрерывна, то производная определенного интеграла с переменным верхним переделом существует и равна значению подынтегральной функции для этого предела, т.е. Ф’(х) = ƒ(х). Доказательство. Аргументу х функции
Применяя формулу Итак, ΔФ = ƒ(ξ)Δх, откуда
что и требовалось доказать. Следствие. Определенный интеграл верхним пределом является одной из первообразных для непрерывной подынтегральной функции. Другими словами, для любой непрерывной на промежутке функции существует первообразная. Формула Ньютона – Лейбница. Метод замены переменной Пусть функция у = f(х) непрерывна на отрезке [a, b], а функция x=φ(t), определена на отрезке [α, β] и имеют на нем непрерывную производную, причем φ (α) = а, φ (β) = b и для всех
Метод интегрирования по частям Если функции u = u(x), v = v(x) имеют непрерывные производные на отрезке [a, b], то справедлива формула
Поскольку функция u(x)v(x) – первообразная для функции u’(x)v(x) + u(x)v’(x), то
откуда и следует формула
Теорема 1 Если в уравнении
(k=0,1,2, … n-1; Где C>0, То существ. единственное решение y=y(x) данного уравн., удовлетворяющее условиям h= min Общим решением диф-ого урав. n-ого порядка (1)назыв. ф-ия
Обладающая след. свойствами:1)при любых значениях произвольных постоянных
Частным решением диф-ого уравнения n-ого порядка называется решение,получ-ся из общего решения (4)при фиксированных значениях произвольных постоянных, т. е.ф-ия
Где Решение диф-огоуравн.n-ого порядка, в каждой точке которого нарушается единственность решения задачи Коши, называется особым. Общим интегралом диф-ого уравнения n-ого порядка называется соотношение вида
Неявно определ-ее общее решение
№61. Дифференциальные ур-я 1-го порядка с разделяющимися переменными: Дифференциальным уравнением 1-го порядка с разделяющимися переменными называется уравнение вида: P(x)dx+Q(y)dy=0 (1). Его общим интегралом будет:
Замечание: При выводе общих интегралов ур-ий (3) и (4) сделаем нек. допущения, к-е могут привести к потере решений. Случай, когда M1(y)·M2(x)=0 или f2(y)=0 необходимо рассматривать отдельно, чтобы не потерять возможных решений дифференциальных ур-ий.
№62. Линейные дифф-е ур-я 1-го порядка: Ур-е: y'+P(x)y=Q(x) (1) линейное относительно неизвестной ф-ии y и её производной y' (а также любое ур-е, с пом. алгебраических преобразований, приводящееся к виду (1) наз. неоднородным линейным дифф-ым ур-ем 1-го порядка. В случае, когда Q(x)=0 ур-е наз. однородным линейным дифф-м ур-м 1-го порядка. Ф-ии Q(x),P(x) должны быть непрерывны в нек. области, для того, чтобы выпол. услов. теоремы Коши. Методы решения: 1.Метод вариации произвольной постоянной (метод Лангранжа): y'+P(x)y=0
= y0=C· C=C(x)-частное реш. неоднородного ур-я (1) yн=C(x)· d(x)· C '(x)-C(x)·P(x)+C(x)·P(x)=Q(x)· yн= Общее реш-е неоднор. ур-я (1) имеет вид: y=y0+yн=С· 2.Метод Бернулли: Любую функцию можно представить в виде произв-я 2-х ненулевых ф-ий y(x)=U(x)·V(x) U'V+UV'+P·UV=Q U'V+U(V'+PV)=0=Q V'+PV=0 V'+PV=0
ln|V|=- V=C· V= U' U'=Q U= U=( U' V+U V'+U Vtgx= U' V+U(V'+Vtgx)= V'+Vtgx=0 V'+Vtgx=0
ln|V|=ln|cosx|+ln|C| ln|V|=ln|C·cosx| C=1 V=cosx U'cosx= U'= U=tgx+C y=(tgx+C)·cosx=sinx+C·cosx Замечание: Полезно иметь в виду, что иногда дифф-е ур-е явл. линейным относ. х,как функция от у,т.е. может быть приведено к виду:
№63. Линейные дифференциальные ур-я 2-го порядка с постоянными коэффициентами: y''+py'+gy=0 (1) p, g Є R. λ2+pλ+g=0 (2) 1) λ1, λ2, Є R, λ1≠λ2 Решение: y1= 2) λ1, λ2 Є R, λ1=λ2=λ y1= 3)λ1, λ2 Є C, λ1/2=α±βi y1= y0=C1 Рассмотрим ур-е: y''+py'+gy=f(x) (3) Во многих случаях правая часть ур-я (3) имеет вид: f(x)= | ||||||||||||||||||
|
| Поделиться: |













 ó
ó  -
-  -
-  = 1,
= 1,  +
+  +
+  =1,
=1,  =a,
=a,  =b,
=b,  =c,
=c,  +
+  +
+  = 1.
= 1.
 =(A1, B1, C1 ),
=(A1, B1, C1 ),  =(A2, B2, C2)
=(A2, B2, C2)  =
= 
 =
=  =
=  ≠
≠ 
 =0, A1×A2 + B1×B2 + C1×C2 =0
=0, A1×A2 + B1×B2 + C1×C2 =0








 Если вершина нах. в О(0,0), то ур-е примет вид
Если вершина нах. в О(0,0), то ур-е примет вид
 При а=в представляет собой ур-е окружности х2+y2=а2
При а=в представляет собой ур-е окружности х2+y2=а2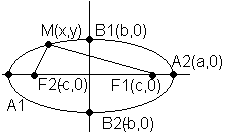
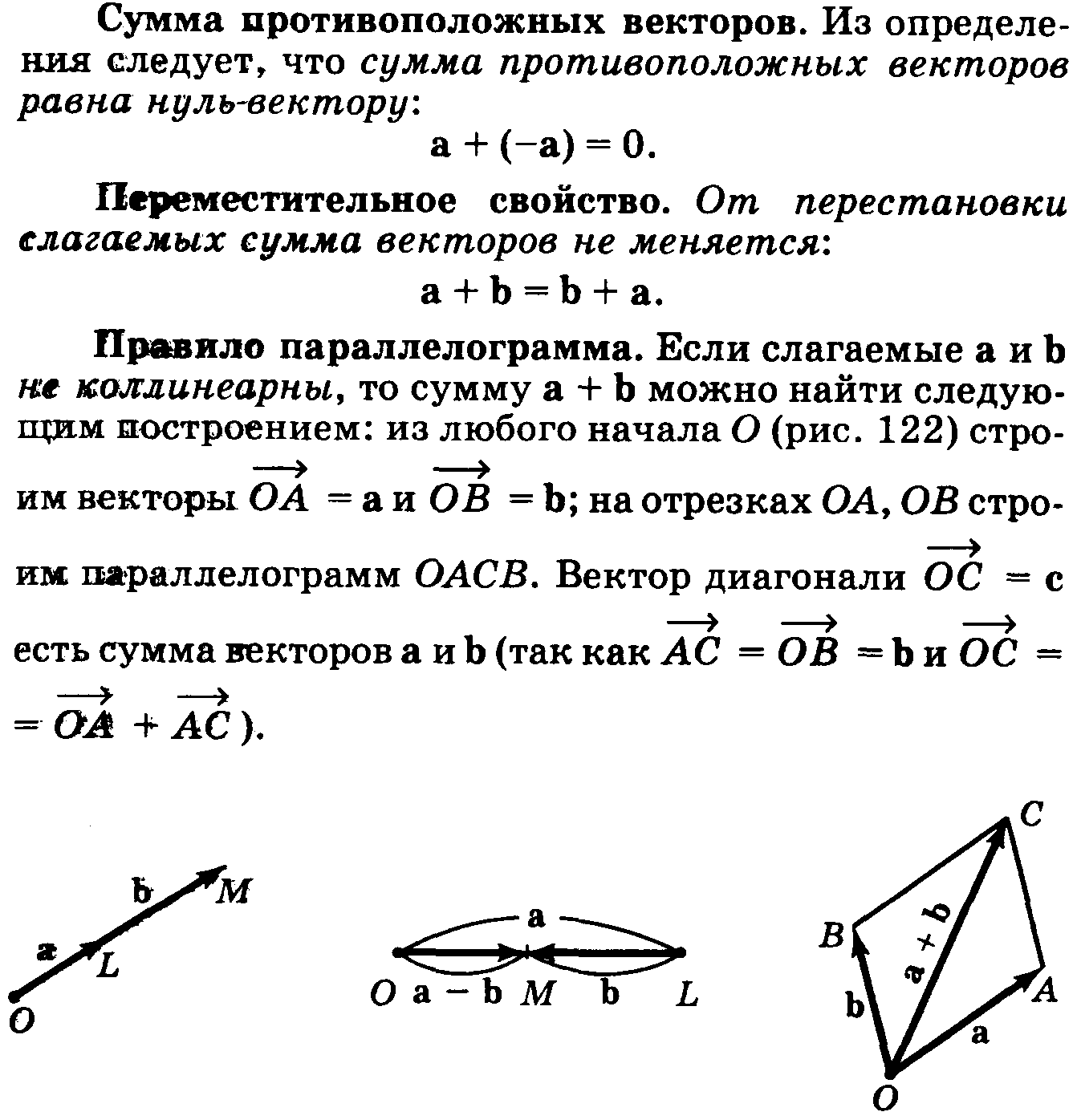
 3.Суммой векторов ā1,ā2,…,ān назыв вектор обознач ā1+ā2+…+ān= ā1, начало которого находится в начале вектора ān, ломаной линии составлен из последов слогаемых векторов (правило замыкания ломоной)
3.Суммой векторов ā1,ā2,…,ān назыв вектор обознач ā1+ā2+…+ān= ā1, начало которого находится в начале вектора ān, ломаной линии составлен из последов слогаемых векторов (правило замыкания ломоной) i=
i=  где △-определитель А, △i-полученое из ⃓△⃓ заменой i-столбца столбцом свободных членов.
где △-определитель А, △i-полученое из ⃓△⃓ заменой i-столбца столбцом свободных членов. A=
A=  B=
B= 

 79≠0 △1=
79≠0 △1=  =395, △2=
=395, △2=  =-158, △3=
=-158, △3=  =237
=237 =
=  =5, X2=
=5, X2=  ,
,
 и
и  -дифференцируемые ф. своих аргументов, то производная сложной ф.
-дифференцируемые ф. своих аргументов, то производная сложной ф.  сущ. и равна произведению производной этой ф-ции по промежуточному аргументу на производную промежуточного по независимой переменной, т.е.
сущ. и равна произведению производной этой ф-ции по промежуточному аргументу на производную промежуточного по независимой переменной, т.е. ,
,  .
. ,
,  ,
,  ,
, 
 ,
,  ,
,  ,
, 
 ,
,  ,
, 
 ,
,  ,
,  ,
, 
 ,
, 
 37. Диф-л функции, его геометр. смысл. Приближенные выч-ия с пом. Диф-ла.
37. Диф-л функции, его геометр. смысл. Приближенные выч-ия с пом. Диф-ла.


 );(
);( ). Теорема Лопиталя: Если ф-и у=f(х) и у=ф(х) удовлетв. услов. теор. Коши в нек.окрестн. х=
). Теорема Лопиталя: Если ф-и у=f(х) и у=ф(х) удовлетв. услов. теор. Коши в нек.окрестн. х=  ,стремят. к 0(
,стремят. к 0( ) при х
) при х 
 и сущ. lim
и сущ. lim  ,то сущ lim
,то сущ lim  и эти пределы равны.Пр.Лопиталя справедливо и при
и эти пределы равны.Пр.Лопиталя справедливо и при  =
=  .
. -экстремум ф-ции.
-экстремум ф-ции. (a,b)=A,
(a,b)=A,  (a,b)=B,
(a,b)=B,  (a,b)=C,
(a,b)=C, -АС<0 и А>0
-АС<0 и А>0
 ,
,  ,…,
,…,  )=φ(x) (1),
)=φ(x) (1), ,
,  ,…,
,…,  — параметры, значения которых требуется определить. Значения у, полученные из формулы (1) при заданных значениях
— параметры, значения которых требуется определить. Значения у, полученные из формулы (1) при заданных значениях  (i=1, 2,..., п), как правило, не совпадают с экспериментальными значениями
(i=1, 2,..., п), как правило, не совпадают с экспериментальными значениями  , приведенными в указанной таблице, т.е. разность
, приведенными в указанной таблице, т.е. разность  -φ(
-φ( ) отлична от нуля для всех или некоторых точек
) отлична от нуля для всех или некоторых точек  (i = 1, 2,..., n). Для каждого i эту разность обозначим через ε
(i = 1, 2,..., n). Для каждого i эту разность обозначим через ε  , и назовем погрешностью:
, и назовем погрешностью: -φ(
-φ( )=ε
)=ε  (i = 1, 2,..., п) (2).
(i = 1, 2,..., п) (2). (k = 0, 1,..., m) функции (1) требуется выбрать так, чтобы сумма квадратов погрешностей была наименьшей, т.е. так, чтобы функция
(k = 0, 1,..., m) функции (1) требуется выбрать так, чтобы сумма квадратов погрешностей была наименьшей, т.е. так, чтобы функция ε
ε  =
=  (
( -φ(
-φ( ))
)) 
 ,
,  ,..., ат ,т.е.
,..., ат ,т.е. ,
,  ,...., ат)=
,...., ат)=  (
( -f(
-f( ,
,  ,
,  ,…,
,…,  ))2 (4).
))2 (4). ,
,  ..., ат) имеет непрерывные частные производные по всем переменным, то необходимое условие ее минимума выражается системой уравнений
..., ат) имеет непрерывные частные производные по всем переменным, то необходимое условие ее минимума выражается системой уравнений =0,
=0,  =0, …,
=0, …,  =0 (5)
=0 (5)

 (x), (6)
(x), (6) (x),
(x),  (x),..., f т (x)- известные функции, например, f
(x),..., f т (x)- известные функции, например, f  (x)=x
(x)=x  ,f
,f  (x)=sin kx, f
(x)=sin kx, f  (x)=cos kx и т.д.
(x)=cos kx и т.д. y
y  -
- 

 (
( ))
))  (7),
(7), (
( -
- 

 (
( ))(-
))(-  (
( ))=0
))=0  (
( -
- 

 (
( ))(-
))(-  (
( ))=0(8)
))=0(8) (
( -
- 

 (
( ))(-
))(-  (
( ))=0
))=0 (x)=
(x)=  (k = 0, 1, 2,..., m), то
(k = 0, 1, 2,..., m), то ,
,  ,…,
,…,  )=
)=  +
+  x+
x+ 
 +…+
+…+
 (9)
(9) n+
n+ 

 +…+
+…+ 

 =
= 
 ;
;

 +
+ 

 +…+
+…+ 

 =
= 

 ; (10)
; (10)

 +
+ 

 +…+
+…+  *
*
 =
= 

 .
. придадим приращение Δх такое, что
придадим приращение Δх такое, что  [a, b], ему соответствует приращение функции
[a, b], ему соответствует приращение функции
 получаем
получаем  = х + θΔх, 0< θ<1.
= х + θΔх, 0< θ<1. θΔх) = ƒ(х), т.е.
θΔх) = ƒ(х), т.е. или
или 
 . Тогда
. Тогда
 Доказательство.
Доказательство.
 которую можно записать в виде
которую можно записать в виде
 функция
функция  и ее частные производные по
и ее частные производные по 
 непрерывны в некоторой замкнутой области G,определ неравенствами
непрерывны в некоторой замкнутой области G,определ неравенствами и,следовательно, ограничены в ней,т.е
и,следовательно, ограничены в ней,т.е .
.

 )
)  ,
, .Это решение определено и непрерывно вместе с производными до порядка n включительно в промежутке
.Это решение определено и непрерывно вместе с производными до порядка n включительно в промежутке  где
где
 (4)
(4) она обращает урав. (1)в тождество;2)знач. постоянных
она обращает урав. (1)в тождество;2)знач. постоянных  можно подобрать так,чтобы она удовлетворяла условиям (3)
можно подобрать так,чтобы она удовлетворяла условиям (3)
 -некоторые числа.
-некоторые числа. (5)
(5)
 , полученное из общего интеграла путем фиксирования значений
, полученное из общего интеграла путем фиксирования значений  произвольных постоянных.
произвольных постоянных. (2). Уравнение вида: M1(x)·N1(y)dx+M2(x)·M2(y)dy=0 (3), а также уравнение вида: y'=f1(x)·f2(y) (4) уравнения, которые с пом. алгебраических преобразований приводятся к ур-ям (3) или (4) наз. ур-ми с разделяющимися переменными. Рассмотрим ур-е (3). Допустим, что N1(y)·M2(x)≠0. Разделим обе части ур-я (3) на N1(y)·M2(x). Получим:
(2). Уравнение вида: M1(x)·N1(y)dx+M2(x)·M2(y)dy=0 (3), а также уравнение вида: y'=f1(x)·f2(y) (4) уравнения, которые с пом. алгебраических преобразований приводятся к ур-ям (3) или (4) наз. ур-ми с разделяющимися переменными. Рассмотрим ур-е (3). Допустим, что N1(y)·M2(x)≠0. Разделим обе части ур-я (3) на N1(y)·M2(x). Получим:  ,
, Рассмотрим ур-е (4):
Рассмотрим ур-е (4):  Домножим обе части ур-я на dx и разделим на f2(y) в предположении, что f2(y)≠0.
Домножим обе части ур-я на dx и разделим на f2(y) в предположении, что f2(y)≠0.

 – общий интеграл.
– общий интеграл.
 ln
ln  y|=-
y|=- 
 y=
y= 












 +Vdx=0
+Vdx=0


 .
. , y2=
, y2=  , y0=C1
, y0=C1  , y2=x
, y2=x 
 2=
2=  sinβx
sinβx 2
2  1cosβx+C2sinβx)
1cosβx+C2sinβx)


