Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обеспечение видимости. Расчетные схемы видимостиСодержание книги
Поиск на нашем сайте
Видимостью дороги называют минимальное необходимое расстояние, на котором водитель должен видеть впереди себя дорогу, с тем, чтобы заметить препятствия, он смог своевременно его избежать. На прямом горизонтальном участке водитель в хорошую солнечную погоду просматривает встречный транспорт на расстояние более 1000 м. Препятствиями для видимости дороги в плане на кривых малого радиуса являются расположенные с внутренней стороны кривой лес, строения или крутой откос выемки. На переломах продольного профиля видимость может быть не обеспечена на выпуклых переломах при малой величине радиусов выпуклых вертикальных кривых, на вогнутых переломах при освещении дороги фарами ночью при малых радиусах вогнутых кривых. Расстояние видимости должно быть достаточным, чтобы водитель, увидев препятствие, смог остановить машину, не доезжая до него или объехать его. В соответствии с этим расстояние видимости определяют, исходя из двух принципиально разных предпосылок: · схемы торможения, предусматривающей остановку перед препятствием или встречным автомобилем; · схемы объезда, исходящей из объезда автомобилем препятствия или обгона попутного автомобиля с выездом на смежную полосу встречного движения. Расстояние видимости по 1–ой схеме обеспечивает безопасность движения, по 2–ой – как безопасность, так и бесперебойность движения. Рассмотрим вывод расчетных зависимостей (рис. 3.14).
а)
б)
в)
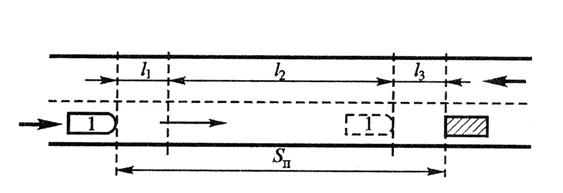
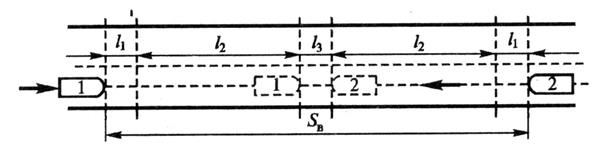
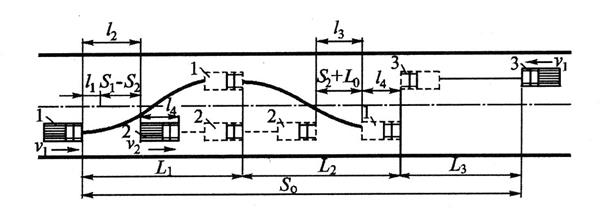
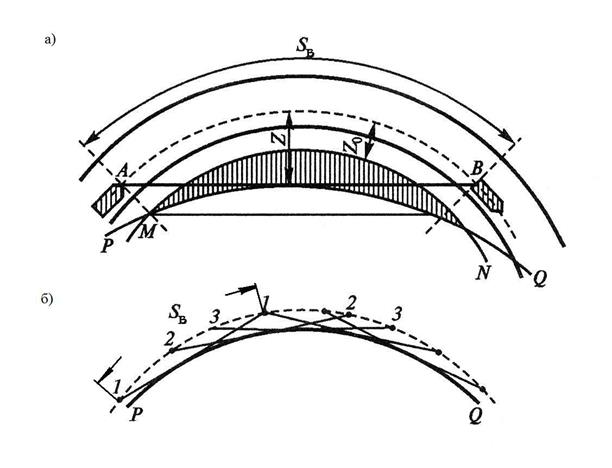
Рис. 3.14. Схемы видимости: а – схема определения расстояния видимости поверхности дороги S п; б – схема определения расстояния видимости встречного автомобиля S в; в – схема определения расчетного расстояния видимости при обгоне S о
1. Схема – «одиночное торможение»: автомобиль встречает препятствие на той же полосе движения и требуется полная его остановка на безопасном расстоянии от препятствия (рис. 3.14, а). Этот случай является расчетным для дорог всех категорий и, особенно, для дорог с четко выделенными полосами движения, когда выезд на соседнюю полосу невозможен. Расчетное расстояние по этой схеме складывается из трех расстояний:
где l 1 – путь, проходимый автомобилем за время реакции водителя; ST – путь торможения; l 0–запас пути. Время реакции водителя t зависит от условий движения и индивидуальных психологических особенностей водителя. В городских условиях или на горных дорогах водитель ведет автомобиль с повышенным вниманием, в то время, как в однообразной местности его внимание рассеивается. В ряде стран предлагают время реакции принимать дифференцированно. Например, при обгоне t = 0,75 с, поскольку водитель располагает временем для подготовки маневра. При неожиданно возникшем препятствии t = 1,5 с. В Швейцарии на дорогах с разделительной полосой, где невозможно появление пешеходов, принимают t = 2 с, на обычных дорогах t = 1 с. В Англии принимают t = 0,75 с в городских условиях и t = 2,5 сек на загородных дорогах. В РФ время реакции водителя принимают в среднем равным 1 с. С учетом вышесказанного, пренебрегая величиной коэффициента качения f, получим:
или выражая V в км/ч
2. Схема – «двойное торможение»: Автомобиль и встречный автомобиль, едущий по той же полосе движения, должны, увидев друг друга, становиться, не доезжая друг до друга (рис. 3.14, б). Эта схема применима для двухполосных и однополосных дорог (II – V категорий). Расчетное расстояние видимости по этой схеме складывается из расстояний, которые автомобили проходят за время реакции водителей, тормозных путей автомобилей и расстояния запаса
Для случая V 1 = V 2, i1 = i2 причем, один автомобиль движется вверх по уклону, а другой вниз
3. Схема – «обгон»: Быстроходный автомобиль обгоняет тихоходный автомобиль с выездом на соседнюю полосу движения до встречи со встречным автомобилем (рис. 3.14, в). Эта схема приемлема для дорог без разделительной полосы. В начальный момент времени расстояние между обгоняющим и обгоняемым автомобилем равно разности их тормозных путей плюс путь, проходящий обгоняющим автомобилем за время реакции водителя
Путь обгона рассматривается как состоящий из трех путей: L = L 1 + L 2 + L 3. Участок L 1 – обгоняющий автомобиль, выехав на смежную полосу движения, поравнялся с обгоняемым автомобилем. Это расстояние зависит от разности скоростей идущих автомобилей
Участок L 2 – обгоняющий автомобиль, возвращается на свою полосу движения, причем между обгоняющим и обгоняемым автомобилем расстояние должно равняться тормозному пути второго автомобиля с некоторым запасом
Тогда
Участок L 3 – путь, проходящий за это время встречным автомобилем
Расстояния видимости нормируется ГОСТом [3] в зависимости от скорости движения одиночного легкового автомобиля. Минимальные расстояния видимости нормируются в зависимости от расчетной скорости (табл. 3.2). Таблица 3.2 Нормативные значения расстояний видимости по ГОСТу [3]
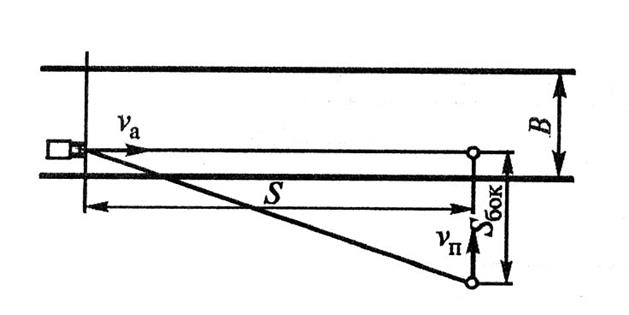
Расстояние видимости по схеме «обгон» нормативными документами не нормируется. Расчеты показывают, что оно должно быть более 700 м. Дорога считается хорошо запроектированной, если обгоны возможны на участках, составляющих более 2/3 ее длины. Необходимость в обеспечении боковой видимости возникает в городских условиях, при пересечениях с железными и автомобильными дорогами в одном уровне, в местах, где возможен переход дороги людьми и животными. Необходимое расстояние боковой видимости (рис. 3.15)
где S – тормозной путь Vп, Va – соответственно скорость пешехода и автомобиля.
Рис. 3.15. Схема к определению расстояния боковой видимости
Для бегущего человека V n может быть принята 10 км/час. По СНиП [2] для дорог I – III категорий L б = 25 м, для дорог I – V категорий L б = 15 м.
3.7. Обеспечение видимости на кривых в плане
Видимость на кривой в плане обеспечена, если автомобиль находящийся в точке А, видит автомобиль, находящийся в точке В на расстоянии, равном расчетному расстоянию видимости для данной категории дороги (рис. 3.16).
Рис. 3.16. Обеспечение видимости на кривой в плане
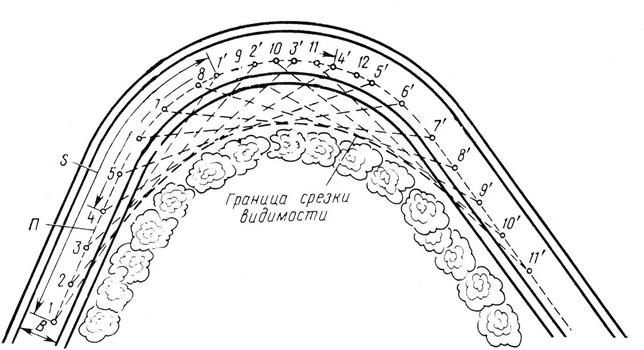
Луч зрения, равный расстоянию видимости по одной из приведенных выше схем, является границей площади, внутри которой не должно быть препятствий, мешающих видимости. Обеспечение видимости на кривых в плане проверяют для автомобилей, движущихся по крайней внутренней полосе движения. Принимают, что глаз водителя расположен в 1,5 м от внутренней кромки проезжей части на высоте 1,2 м. Это соответствует положению водителя легкового автомобиля. Разработан графический метод определения границы срезки препятствий – в зоне видимости (рис. 3.17).
Рис. 3.17. Обеспечение видимости на кривых в плане: а – общая схема видимости; б – построение кривой видимости
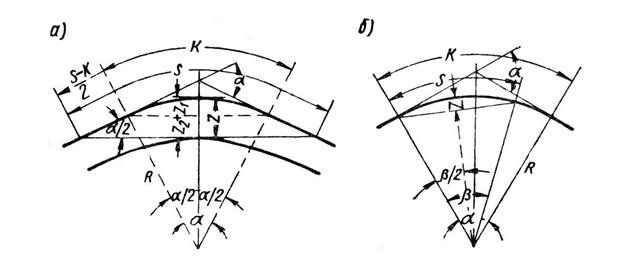
На плане закругления по линии траектории движения автомобиля откладывают расстояния видимости S, которые соединяются прямыми линиями. Огибающая этих линий определяет границу видимости. Графическое определение границы видимости целесообразно, когда из зоны видимости необходимо удалить ценные здания или произвести другие дорогостоящие работы. В остальных случаях можно определить максимальную стрелу видимости в центре круговой кривой аналитическим методом и принятии величину расчистки в пределах всей кривой одинаковой. Стрела видимости в центре круговой кривой приближенно определяется из следующих соображений: 1-й случай: длина кривой меньше расстояния видимости К < S (рис. 3.18, а) Z = Z 1 + Z 2,
где
Откуда
2-ой случай: длина кривой больше расстояния видимости В этом случае второй член исчезает
где
При K = S, β = α
Рис. 3.18. Схема к расчету зависимости между радиусом кривой, углом поворота и расстоянием видимости в плане
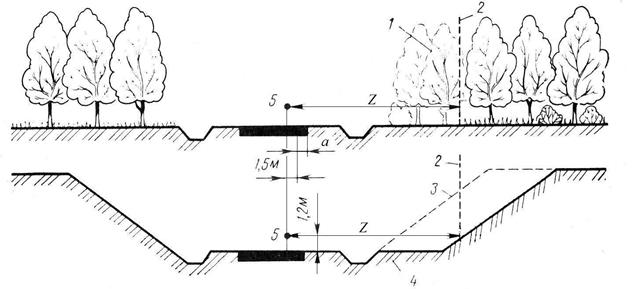
Проверка обеспечения видимости производится путем построения поперечника дороги (рис. 3.19). Видимость проверяется для автомобиля, едущего по крайней правой полосе движения Глаза водителя расположены на высоте 1,2 м от поверхности дороги на расстоянии 1,5 от края проезжей части. В выемках целесообразно срезку откосов доводить до уровня по поверхности дороги с учетом зарастания откосов кустарником и выпадения снега (рис. 3.19, б).
Рис. 3.19. Проверка обеспечения видимости на кривых: а – граница вырубки деревьев в насыпи; б – граница срезка откоса в выемке; 1 – расчистка для обеспечения видимости в лесу; 2 – граница зоны видимости; 3 – срезка в выемки; 4 – наиболее целесообразный уровень срезки; 5 – положение глаз водителя
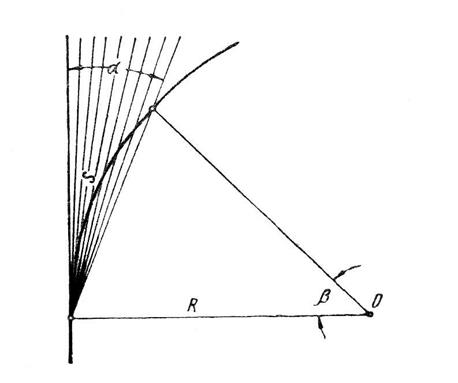
Видимость дороги на кривых в плане ночью обеспечивается за счет света фар (рис. 3.20).
Рис. 3.20. Видимость ночью на кривой в плане при свете фар
Современные фары освещают дорогу на расстоянии S = 100–175 м. Середина пучка света направлена по касательной к траектории движения. Угол раствора пучка света α = 2°. При малых радиусах кривых в плане большая часть света не попадает на поверхность дороги. Минимальный радиус кривой в плане, обеспечивающий расстояние видимости можно определить из следующих соображений: Если пучок света фар расходится под углом α, то центральный угол β, стягивающий дугу, равную расстоянию видимости S, равен 2α. Поскольку
При S ≈ 100 м, α = 2°, R min ≈ 1500 м. Безопасность на дороге ночью может быть улучшена за счет установки на внешней обочине столбиков с отражателями.
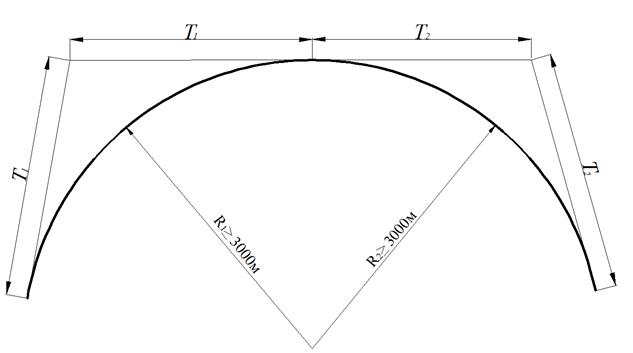
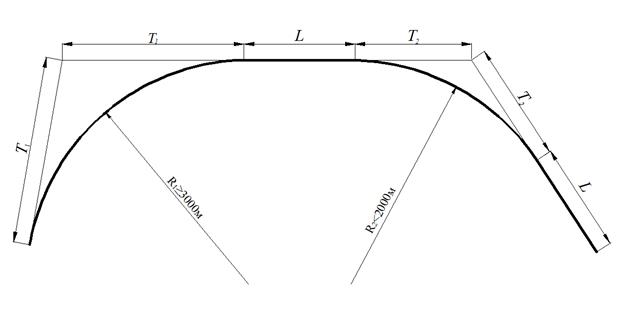
3.8. Примеры сопряжения кривых в плане На рис. 3.21 и 3.22 показаны примеры взаимного сопряжения близкорасположенных кривых в плане. а)
б)
в)
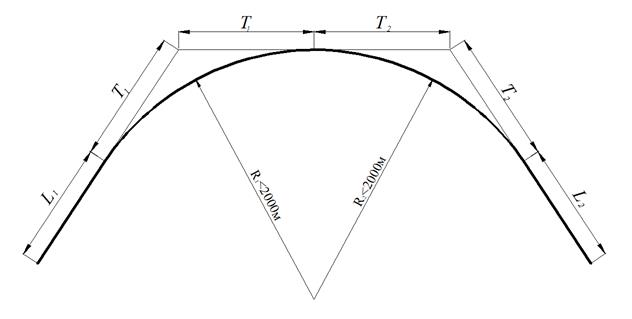
Рис. 3.21. Сопряжение односторонних кривых: а – при радиусах R ≥ 3000 м; б – при радиусах R ≤ 2000 м
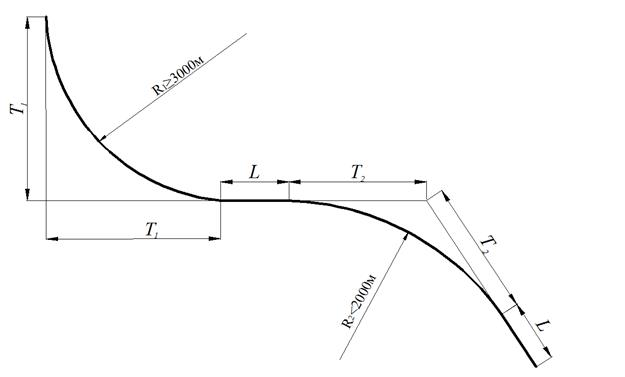
Рис. 3.22. Сопряжение обратных кривых в плане (S – образных) при радиусах R ≥ 3000 м и R ≤ 2000 м
При сопряжении односторонних кривых с радиусами R ≤ 2000 м кривые непосредственно стыкуются без устройства между ними переходных кривых. При близко расположенных обратных кривых необходимо оставить между ними место на размещение переходных кривых.
|
|||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 4096; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.56.125 (0.008 с.) |

 ,
,

 .
.
 .
. .
.
 ,
,  .
. .
. (рис. 3.18, б).
(рис. 3.18, б). ,
, .
.
 , то
, то .
.