
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Применение широкополосных сигналов для измерения координат и электромагнитной совместимости.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Применение ШПС позволяет совместить системы передачи информации и системы траекторных измерений. При измерении параметров движения объекта наибольший интерес представляют расстояние между приёмником и передатчиком и их относительная скорость. Расстояние измеряется по задержке во времени, а скорость – по доплеровскому смещению частоты. Точность измерения и разрешающая способность по задержке определяются отношением сигнал-помеха
Чем больше h 0и
Чем больше h 0 и Электромагнитная совместимость. Шумоподобные сигналы обеспечивают хорошую электромагнитную совместимость ШСС (ЭМС) с узкополосными системами радиосвязи и вещания. На рисунке 1.31 изображены спектры ШСС с ШПС с шириной спектра Системы связи с ШПС можно совмещать и с радиотелевизионными системами. На рисунке 1.32 изображен спектр телевизионного сигнала N тв. Программы телевидения в одной территориальной зоне передаются по нескольким каналам с большими защитными частотными интервалами. Обычно в этих частотных защитных интервалах не допускается работа каких-либо радиотехнических систем, чтобы не создавать помех телевизионным передачам. Однако можно в этих частотных интервалах разместить системы связи с ШПС так, как это показано на рисунке 1.32. Спектр ШПС расположен вблизи спектра телевизионного сигнала, там, где спектральная плотность последнего резко уменьшается. При этом взаимные помехи и той, и другой системе будут малыми. Следует отметить, что если вместо ШПС использовать сигналы с частотной модуляцией, то уровень взаимных помех возрастает, так как сигналы системы связи и телевидения относятся к одинаковому классу и демодулируются частотным детектором.
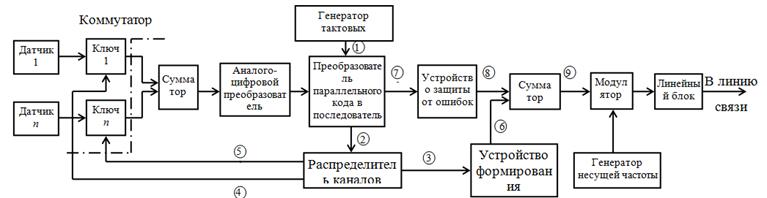
Таким образом, системы связи с ШПС обладают хорошей ЭМС с системами радиосвязи, вещания и телевидения. Ранее было упомянуто, что ШПС обеспечивают высокую эффективность использования радиоспектра в ССПС. Если рассматривать действие систем связи в некотором замкнутом пространстве, то оказывается, что наилучшую ЭМС при ограниченном диапазоне частот обеспечивают ШПС, хотя сами по себе они требуют более широкой полосы, чем традиционные узкополосные системы. В то же время общая полоса частот при использовании ШПС будет меньше. Из рассмотрения основных свойств ШПС следует, что применение ШПС в системах передачи данных позволяет обеспечивать высокую помехоустойчивость относительно мощных помех, скрытность, адресность, работоспособность в общей полосе частот, борьбу с многолучевостью, высокие точности измерений и разрешающие способности, хорошую ЭМС сомногими радиотехническими системами. 3. структурные схемы ПУ и КП цифровой системы ТИ (рис. 1.33; 1.34). На рис. 1.33 представлена структурная схема КП, а на рис. 1.35 – временная диаграмма его работы. Всей работой управляет генератор тактовых импульсов (ГТИ), частота импульсов которого выбирается в зависимости от скорости преобразования в АЦП, скорости передачи информации по каналу связи и числа каналов. Преобразователь параллельного кода в последовательный подсчитывает такты и определяет границы подциклов. Под подциклом понимается время, отведенное для передачи информации по одному информационному каналу. Распределитель каналов подсчитывает подциклы и определяет границы циклов (диаграмма 3). Таким образом, в каждый момент времени открыт только один ключ коммутатора и аналоговое сообщение от соответствующего датчика поступает на вход АЦП, где, как правило, преобразуется в двоичный код (цифровой эквивалент). Неизбыточная кодовая комбинация поступает в устройство защиты от ошибок (УЗО), где кодируется в одном из помехозащищенных кодов и через сумматор поступает на вход группового модулятора. Учитывая, что в цифровых телеметрических системах предъявляются более жесткие требования к синхронизации, чем в системах с ВРК, а это связано с тем, что каждому отсчету соответствуют n разрядов, в системе предусмотрено устройство формирования синхросигналов. В качестве синхросигналов применяется специальная кодовая комбинация. Частота следования слов (т.е. частота коммутации сообщений) и двоичных разрядов отличаются в n раз, где n=k+r – разрядность слова. Поэтому слова на выходе УЗО следуют друг за другом плотно, без временных пауз (диаграмма 8). Операция формирования полного телеметрического сигнала заканчивается в сумматоре. Таким образом, полный сигнал кодо-импульсно-модулирован-ный (КИМ) – это последовательность единиц и нулей, несущих информацию о результатах отдельных измерений и различную вспомогательную информацию. Разметка телеметрического цикла (кадра) в цифровой форме на выходе сумматора представлена на диаграмме 9 рис. 1.35. С выхода сумматора КИМ сигнал поступает на модулятор передатчика. Вообще говоря, в цифровой системе может быть применен любой вид манипуляции несущей – АМП, ЧМП или ФМП, но с точки зрения повышения помехоустойчивости наиболее предпочтительны ФМП (ОФМП), затем ЧМП. Таким образом, высокочастотный сигнал цифровой телеметрической системы имеет двойную модуляцию КИМ-ЧМП или КИМ-ФМП (ОФМП). В случае применения радиолиний может потребоваться тройная модуляция (например, КИМ-ЧМП-ФМ), которая позволяет сформировать спектр высокочастотного телеметрического сигнала таким образом, чтобы облегчить выделение несущей в приемном устройстве для синхронного детектирования. Структурная схема ПУ приведена на рис. 1.34. Сигнал КИМ с приемника, где проведено детектирование несущей частоты, фильтрация и усиление сигнала, поступает в устройство демодуляции КИМ. Поскольку двоичный сигнал искажен помехой, перед обработкой он проходит через восстановитель, который отфильтровывает помеху и генерирует импульсы стандартной формы. Восстановитель представляет собой управляемый интегратор, который накапливает (рис. 1.36) выходное напряжение с детектора приемника в течение одной двоичной единицы. Если в течение этого времени напряжение на интеграторе превысило некоторый порог, считается, что была принята «1», в противном случае считается «0». В первом случае восстановитель выдает стандартный импульс. В конце интервала интегрирования происходит сброс напряжения интегратора.
Рис. 1.33. Структурная схема КП цифровой телеметрической системы
Рис. 1.34. Структурная схема ПУ цифровой телеметрической системы 
Рис. 1.35. Временные диаграммы работы КП
Рис. 1.36. Временные диаграммы работы восстановителя сигнала Работа приемной части управляется двумя типами синхронизирующих устройств: узлом тактовой синхронизации (УТС) и узлом цикловой синхронизации (УЦС). Для подстройки частоты и фазы местного генератора тактовых импульсов может быть использована инерционная система ФАП или система дискретной подстройки. Импульсы синхронизации кодовых слов и циклов получаются в устройстве цикловой синхронизации. Информационные символы принимаются преобразователем последовательного кода в параллельный, который выполняет ответные функции аналогичному преобразователю КП и записывает их в запоминающее устройство. Перед регистрацией производится коррекция ошибок. В УЗО имеются схемы, анализирующие принятые кодовые комбинации, и при необходимости производится их исправление в запоминающем устройстве и выдается разрешение на шину К. Адрес канала выдает распределитель каналов путем подачи сигнала на шину А. Исправленная кодовая комбинация поступает на шину И. Шины А, К и И многоразрядные. С этих шин информация в случае необходимости поступает в ЭВМ и на индивидуальные регистрирующие устройства, которые могут быть как аналоговыми, так и цифровыми. При аналоговом воспроизведении полезных сообщений информация из канальных регистров поступает на входы цифроаналоговых преобразователей (ЦАП), где преобразуется с необходимым коэффициентом в аналоговую величину и поступает на вход регистрирующих устройств. При цифровой регистрации цифровые эквиваленты снимаются с шины И, поступая затем на вход масштабирующих устройств, где происходит их умножение на соответствующие коэффициенты с целью вывода информации в абсолютных единицах. Масштабирующее устройство является общим для всех каналов. Промасштабированные цифровые эквиваленты записываются в канальные регистры, а затем через преобразователь код – код поступают на цифровые регистраторы. Преобразователь код – код производит преобразование цифрового эквивалента в рабочий код регистрирующего устройства.
Экзаменационный билет № 28 1. оптимальный когерентный прием (п. 1.4.1; рис. 1.24). B соответствии с теорией оптимального приема равновероятных двоичных сигналов, известных точно, правило работы приемника определяется выражением
где Из рассмотрения правила (1.24) следует, что в качестве «образцов» на приемной стороне системы связи необходимо располагать такими же сложными сигналами, которые используются для передачи. Процедура оптимального приема может быть несколько упрощена, если отказаться от непосредственного приема сложного сигнала «в целом» и вести когерентный поэлементный прием сигнала с последующей обработкой полученных результатов. Приняв во внимание, что посылки сложного сигнала можно представить в виде
где
Это выражение показывает, что оптимальный прием сводится к когерентной обработке всех элементов посылки сигнала, суммированию полученных результатов и принятию решения о переданном символе в соответствии с результатом сравнения образованных сумм. Для конкретизации выражения (1.36) необходимо задать вид используемого сигнала. При наиболее часто применяемых противофазных сложных сигналах элементы
Тогда
где Приняв во внимание (1.38), выражение (1.36) сложного двоичного сигнала с противофазной можно записать в виде
Это правило можно реализовать различными оптимальными схемами приема. Одна из них приведена на рисунке 1.24. Достоинством этой схемы является то, что она не требует «образцов» в виде сложных сигналов. Для приема достаточно иметь гармоническое опорное напряжение с нулевой фазой и псевдослучайную последовательность, формируемую по такому же правилу, как и на передающей стороне системы. В одном канале приемника используется последовательность, снимаемая с одного плеча выходной ячейки регистра сдвига, а в другом канале – с другого плеча.
Рисунок 1.24 – Структурная схема оптимального приёмника двоичных сигналов с противофазной ФМН Хотя принципиально все варианты оптимального приема обеспечивают одинаковые результаты, их значимость с точки зрения практической реализации различна. Дело в том, что при практической реализации всегда имеется некоторое рассогласование между параметрами принимаемого сигнала и параметрами приемника. С увеличением базы сигнала значительно повышаются требования к точности изготовления и стабильности узлов и элементов приемника. Невыполнение этих требований может привести к заметному снижению помехоустойчивости по сравнению с оптимальным приемом. В этой связи особое значение приобретает выбор такого варианта оптимального приема, реализация которого обеспечивала бы значительное ослабление влияния дестабилизирующих факторов на помехоустойчивость. Если случайные рассогласования между параметрами сигнала и приемника таковы, что априорными сведениями о фазе сигнала воспользоваться нельзя (сигнал имеет случайную фазу), лучшие результаты обеспечивает оптимальный некогерентный прием.
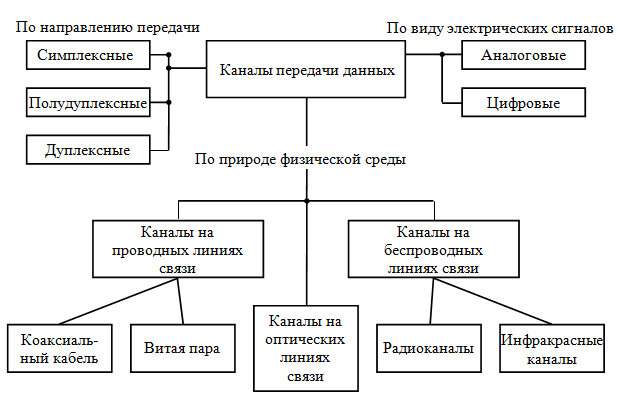
2. Классификация каналов связи (рис. 3.2; 3.9; 3.10). Канал связи – это совокупность технических средств, обеспечивающих передачу сообщений по линии связи с заданной степенью верности от источника приемнику. Может быть организовано много каналов связи для передачи сообщений многим приемникам (ТУ) или от многих источников (ТИ, ТС) по одной линии связи. Цифровой канал является битовым трактом с цифровым сигналом на входе и выходе. На вход аналогового канала поступает непрерывный сигнал, и с его выхода снимается также непрерывный сигнал. Различают каналы: коммутируемые и выделенные, двух- и четырёхпроводные. Коммутируемые каналы предоставляются потребителям на время соединения по их требованию. Такие каналы принципиально содержат в своем составе коммутационное оборудование телефонных станций (АТС). Выделенные (арендованные) каналы арендуются у телефонных компаний или (очень редко) прокладываются заинтересованной организацией. Такие каналы являются принципиально двухточечными. Их качество выше, чем у коммутируемых каналов, так как на них не влияет коммутационная аппаратура АТС. Каналы, как правило, имеют двухпроводное или четырёхпроводное окончание. Их называют, соответственно, двухпроводными и четырёхпроводными. Четырёхпроводные каналы предоставляют два провода для передачи сигнала и еще два провода для приема. В таких каналах практически полностью отсутствует влияние сигналов, передаваемых во встречном направлении,
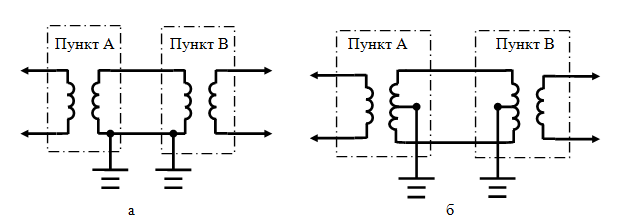
Рисунок 3.2 - Классификация каналов передачи данных Двухпроводные каналы используют два провода как для передачи, так и для приема сигналов. Такие каналы позволяют экономить на стоимости кабелей, но требуют усложнения каналообразующей аппаратуры и аппаратуры пользователя. Двухпроводные каналы требуют разделения принимаемого и передаваемого сигналов, что реализуется при помощи дифференциальных систем, обеспечивающих необходимое затухание по встречным направлениям передачи. Наличие дифференциальных систем приводит к искажениям амплитудно-частотных и фазочастотных характеристик канала и к специфической помехе в виде эхо-сигнала. Физические каналы (среды) передачи данных бывают двух типов: открытые и закрытые. В закрытом канале распространение сигналов ограничено данным каналом, и, за исключением небольших утечек, сигнал не покидает среду передачи. К числу закрытых сред передачи относятся пара проводов, коаксиальный кабель, волновод, волоконно-оптический кабель. При использовании пары проводов по схеме, приведенной на рисунке 3.3, а, линия получилась, не согласованна с землей [12], почти все устройства, генерирующие шум, являются причиной возникновения в ней помех (наводок). Вот почему для существенного уменьшения уровня шума в канале связи стало применяться согласованная двухпроводная линия (рисунок 3.3,б).
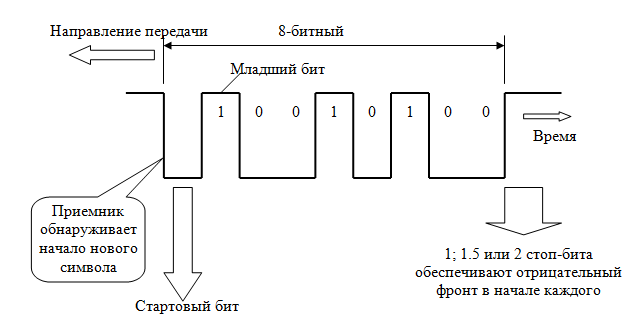
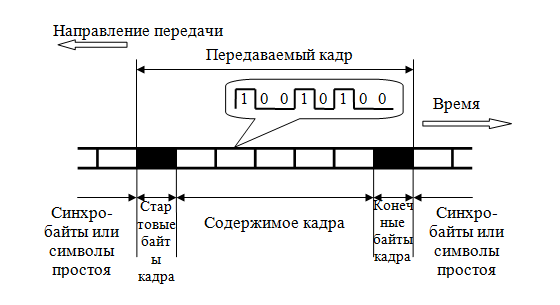
Рисунок 3.3 - Виды проводных схем передачи: а – несогласованная; б – согласованная Наиболее широко используются закрытые среды передачи, состоящие из скрученных вместе пар проводов – в одном кабеле может быть от 4 до 3000 таких пар. Поскольку провод функционирует, как антенна, то для уменьшения электромагнитных помех применяют экранирование и скручивание (переплетение) проводов друг с другом с определенным шагом. При увеличении частоты резко возрастает затухание сигнала в витой паре, а так же увеличиваются перекрестные наводки в соседних парах кабеля. Максимально возможная частота передаваемого сигнала по симметричному кабелю без применения специальных технологий равна примерно 1МГц. При передаче данных между двумя взаимодействующими объектами возможны три вида связи: симплексный –используется, когда передача данных должна осуществляться только в одном направлении, например в системахконтроля, в которых информация с датчиков передается в управляющий компьютер через регулярные промежутки времени; полудуплексный –применяется, когда два взаимодействующих объекта хотят обмениваться информацией поочередно, т.е. канал используется поочередно для передачи данных в обоих направлениях. Ясно, в таком режиме каждый объект должен иметь возможность переключаться от состояния передачи к состоянию приема; дуплексный –используется для обмена данными между двумя взаимодействующими объектами (устройствами) в обоих направлениях одновременно, например, когда пропускная способность канала позволяет потоку данных осуществляться в обоих направлениях независимо. При обмене данными на физическом уровне единицей информации является бит, поэтому средства физического уровня всегда поддерживают побитовую синхронизацию между приемником и передатчиком. Чтобы приемник мог правильно декодировать и интерпретировать получаемый набор битов, он должен знать: – скорость передачи битов, определяемую интервалом времени, выделяемым на один битовый разряд; – начало и конец каждого элемента (символа или байта); – начало и конец каждого полного блока сообщения или кадра. Эти три фактора называют соответственно побитной или тактовой синхронизацией, побайтной или посимвольной синхронизацией и поблочной или покадровой синхронизацией. Канальный уровень оперирует кадрами данных и обеспечивает синхронизацию между приемником и передатчиком на уровне кадров. В обязанности приемника входит распознавание начала первого байта кадра, границ полей кадра и признака окончания кадра. Обычно достаточно обеспечить синхронизацию на указанных двух уровнях – битовом и кадровом, чтобы передатчик и приёмник обеспечили устойчивый обмен информацией. Однако при плохом качестве линии связи (как правило это относится к телефонным коммутируемым каналам) для удешевления аппаратуры и повышения надежности передачи данных вводят дополнительные средства синхронизации на уровне байт. Такой режим работы называется асинхронным или старт-стопным. Использование такого режима работы обусловлено наличием устройств, которые генерируют байты данных в случайные моменты времени. Так работает клавиатура дисплея или другого терминального устройства, с которого человек вводит данные для обработки их компьютером. В асинхронном режиме каждый байт данных сопровождается специальными сигналами «старт»–стартовый бит и «стоп»–стоповый(ые) бит(ы) (рисунок 3.9). Назначение этих сигналов состоит в том, чтобы, во-первых, известить приемник о приходе данных и, во-вторых, чтобы дать приемнику достаточно времени для выполнения некоторых функций, связанных с синхронизацией, до поступления следующего байта. Сигнал «старт» имеет продолжительность тактовый интервал, а сигнал «стоп» может длиться один, полтора или два такта, поэтому говорят, что используется один, полтора или два бита в качестве стопового сигнала, хотя эти сигналы не несут информации. Асинхронным данный режим называют потому, что каждый байт может быть несколько смещен во времени относительно побитовых тактов предыдущего байта. Такая асинхронность передачи байт не влияет на корректность принимаемых данных, как в начале каждого байта происходит дополнительная синхронизация приемника с источником за счет стартового бита. Более «свободные» временные допуски определяют низкую стоимость оборудования асинхронной системы. При синхронном режиме передачи старт-стопные биты между каждой парой байт отсутствуют и весь блок или кадр данных передается как одна цепочка битов без каких-либо задержек между 8-битньми элементами. Чтобы приёмник обеспечивал различные уровни синхронизации, необходимо выполнение следующих требований: – передаваемая цепочка битов должна быть закодирована так, чтобы приемник мог осуществлять побитовую синхронизацию; – каждому кадру должен предшествовать один или более зарезервированных байтов или символов, благодаря чему приемник может надежно разделить полученную цепочку битов по границам байтов или символов (побайтная или посимвольная синхронизация); – содержимое каждого кадра обрамляется парой зарезервированных байтов или символов. Благодаря последнему требованию приемник оповещается о поступлении кадра данных и об окончании кадра (рисунок 3.10). При наличии промежутков времени между передачей двух последовательных кадров в этот период либо непрерывно передаются синхробайты бездействия (простоя), что позволяет приемнику поддерживать побитную или побайтную синхронизацию, либо каждому кадру предшествует один или несколько специальных синхронизирующих байтов или символов, например 01111110, что позволяет приемнику вновь войти в байтовый синхронизм с передатчиком. Для обеспечения побитовой синхронизации используют самосинхронизирующиеся коды.
Рисунок 3.9 - Асинхронная передача
Рисунок 3.10 - Синхронная передача 3. Тактовая синхронизация (рис. 7.15, 7.17). Под тактовой синхронизацией будем понимать процесс принудительного установления соответствия между периодами входящих импульсов и мгновениями их регистрации. Необходимость тактовой синхронизации можно показать на следующем примере. При фиксированном коэффициенте нестабильности генератора Смещение стробирующего импульса от идеального положения снижает исправляющую способность. Значит, это смещение возможно лишь в допустимых пределах ( Например, если задаться К устройствам синхронизации дискретных систем связи предъявляются следующие требования: незначительное время вхождения в синхронизм при первоначальном включении; малая погрешность в работе на каналах с высоким уровнем помех; устойчивая работа при перерывах связи; простота построения. На практике наибольшее применение нашли схемы тактовой синхронизации на основе генераторов с фазовой автоподстройкой частоты и на основе сдвиговых регистров. Выделение синхросигнала и данных схемами на основе генераторов с фазовой автоподстройкой частоты. Генератор с фазовой автоподстройкой частоты (рисунок 7.15) [18] содержит фазовый компаратор PD, инвертор, генераторы одинаковых по величине токов II, 12, ключи на транзисторах VT1 и VT2, фильтр низких частот и синхрогенератор VCO, управляемый напряжением. Сигнал DIN в коде NRZ (см. пункт 2.1) поступает из линии на вход фазового компаратора. Этот сигнал не должен оставаться в неизменном состоянии (лог. 0 или 1) на протяжении более или менее длительного интервала времени. Например, при проектировании системы передачи данных может быть заранее известно, что максимальная длительность неизменного состояния сигнала не должна превышать двадцати битовых интервалов. (Напомним, что для обеспечения гарантированного изменения состояния сигнала в любом заранее заданном интервале времени применяют скремблирование этого сигнала перед его выдачей в линию, см.пункт 2.5.)
Рисунок 7.15 - Схема генератора с фазовой автоподстройкой частоты (первый вариант) Фазовый компаратор сопоставляет сигнал DIN с синхросигналом CLK от генератора VCO. При правильном фазовом соотношении этих сигналов на выходе данных фазового компаратора формируется сигнал DOUT, соответствующий данным в линии, при этом границы его битовых интервалов задаются отрицательными фронтами сигнала CLK. Чтобы достичь, а затем и поддерживать правильное фазовое соотношение между сигналами DIN и CLK, фазовый компаратор непрерывно отслеживает ошибку взаимного расположения фронтов этих сигналов и формирует управляющие сигналы ускорения UP и замедления DOWN темпа работы генератора VCO. Генератор VCO при номинальном управляющем напряжении, примерно равном U/2, формирует синхросигнал номинальной (ожидаемой) частоты. Повышение и понижение напряжения на управляющем входе генератора приводит к незначительному повышению и снижению частоты. Это позволяет подстраивать фазу синхросигнала в нужном направлении. Чтобы пояснить, каким образом, варьируя частоту сигнала, можно корректировать его фазу, проведем "мысленный эксперимент", в котором частота сигнала CLK на выходе генератора VCO в незначительных пределах регулируется переменным резистором R (рисунок 7.16). При некотором положении движка переменного резистора, близком к среднему, частота сигнала CLK совпадает с частотой "идеального" сигнала CLKI, к которому необходимо подстроиться. Сигнал CLKI поступает на вход синхронизации осциллографа и отображается его верхним лучом. При равенстве частот сигналов CLK и CLKI нижняя осциллограмма неподвижна относительно верхней, при этом, вероятнее всего, наблюдается некоторый фазовый сдвиг сигнала CLK относительно сигнала CLKI. На рисунке показана одна из возможных ситуаций, при которой сигнал CLK отстает по фазе от сигнала CLKI примерно на 110 градусов.
Рисунок 7.16 - Схема, поясняющая процесс фазовой подстройки частоты Чтобы скомпенсировать несовпадение фаз, немного увеличим частоту сигнала CLK перемещением движка переменного резистора вверх. Фронты этого сигнала будут формироваться чуть раньше, нижняя осциллограмма начнет медленно перемещаться влево относительно неподвижной верхней, фазовый сдвиг начнет уменьшаться. Остается только приостановить перемещение в момент, когда фазовый сдвиг станет нулевым. Для этого в нужный момент следует вернуть движок переменного резистора в исходное положение, соответствующее равенству частот. Сигналы UP и DOWN (рисунок 7.15) управляют транзисторными ключами, регулирующими поступление токов I1 и I2 на вход фильтра низких частот. При UP = 0, DOWN = 0 транзисторы VT1 и VT2 выключены, источники тока изолированы от фильтра и генератора VCO, напряжение на входе этого генератора остается постоянным либо незначительно изменяется из-за выравнивания напряжений на конденсаторах фильтра, если исходно эти напряжения не совпадали. При DOWN = 0 и поступлении серии импульсов UP = 1, транзистор VT1 включается по каждому импульсу, транзистор VT2 постоянно выключен, импульсы тока II заряжают конденсаторы фильтра, напряжение на входе генератора VCO повышается, частота сигнала CLK незначительно возрастает. При UP = 0 и поступлении серии импульсов DOWN = 1 ситуация противоположная - транзистор VT2 открывается по каждому импульсу, транзистор VT1 постоянно закрыт, импульсы тока 12 разряжают конденсаторы, частота сигнала CLK незначительно снижается. При UP = 1, DOWN = 1 оба транзистора включены и, поскольку I1 «12, токи практически компенсируются и напряжение на входе генератора VCO почти не изменяется. В реальных условиях работы генератора (рисунок 7.15) импульсы UP и DOWN, в основном, чередуются во времени и чаще всего не перекрываются. Благодаря фильтру низких частот, импульсные воздействия на частоту генератора VCO со стороны фазового компаратора усредняются. Заметный вклад в процесс регулирования частоты сигнала CLK может внести только усредненное по времени устойчивое расхождение этих воздействий. Рассмотрим вариант схемы фазового компаратора PD (рисунок 7.17). Схема содержит последовательно включенные D-триггеры Dl, D3, инвертор D2 и элементы Исключающее ИЛИ D4 и D5. Входные данные DIN принимаются в триггер D1 по положительным фронтам сигнала CLK и переписываются в триггер D3 по отрицательным фронтам этого сигнала. Элементы D4 и D5 формируют положительные импульсы UP и DOWN (сигналы лог. 1) в периоды несовпадений сигналов на входах и выходах соответствующих триггеров D1 и D3. С увеличением этих периодов возрастает длительность соответствующих импульсов (фактически применена широтно-импульсная модуляция). Таким образом, сигналы UP и DOWN отражают фазовые соотношения между тремя сигналами - DIN и двумя его производными, полученными с использованием положительного и отрицательного фронтов сигнала CLK. При правильном соотношении сигналов DIN и CLK сигналы UP и DOWN вносят одинаковые, но противоположные вклады в процессы ускорения и замедления работы генератора VCO, поэтому частота и фаза синхросигнала остается неизменной. При смещении фазы синхросигнала длительность и число импульсов UP или DOWN возрастает, что приводит к компенсации смещения.
Рисунок 7.17 – Фазовый компаратор PD: Контур фазовой автоподстройки частоты представляет собой достаточно "тонкий инструмент". Этот контур должен иметь очень узкую полосу захвата - порядка долей герца. Иными словами, для вхождения устройства в синхронизм с линейным сигналом нужно, чтобы исходная частота генератора G почти не отличалась от входной частоты. В противном случае на входах фазового компаратора будут наблюдаться случайные фазовые соотношения между сигналами, что не позволит выбрать нужное направление коррекции частоты. Из этого следует, что генератор G должен быть высокостабилизированным, но это Экзаменационный билет № 29 1. Блоковый перемежитель (рис. 6.1). модифицированный блоковый перемежитель (рис. 6.2). межблоковое перемежение (рис. 6.3). Изменение по определенному правилу естественного порядка следования символов в некоторой кодовой последовательности называют процедуру перемежением (Interleaving. Методы перемежения–деперемежения обычно используются для разрушения пакетов ошибок, вызванных замираниями уровня принимаемого сигнала, и, следовательно, уменьшения степени группирования ошибок в последовательности символов, поступающих на вход канального декодера. При перемежении передаваемое кодовое слово формируется из символов различных кодовых слов. Поэтому при деперемежении возникающий пакет ошибок разбивается на отдельные ошибки, принадлежащие различным кодовым словам. Иначе говоря, при деперемежении пакет ошибок трансформируется в последовательность независимых ошибок, для исправления которых, как правило, можно использовать менее мощный код. С увеличением глубины перемежения можно ожидать улучшения характеристик помехоустойчивости, поскольку при этом происходит ослабление корреляции ошибок. Но при этом возрастает задержка в доставке сообщения, связанная с выполнением процедур
|
||||||||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 534; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.96.17 (0.012 с.) |

 (1.46)и шириной спектра сигнала и характеризуются ошибкой
(1.46)и шириной спектра сигнала и характеризуются ошибкой (1.55)
(1.55) , тем меньше ошибка в измерении задержки, тем выше точность измерения и разрешающая способность по расстоянию. Точность измерения доплеровского смещения частоты определяется отношением сигнал-помеха
, тем меньше ошибка в измерении задержки, тем выше точность измерения и разрешающая способность по расстоянию. Точность измерения доплеровского смещения частоты определяется отношением сигнал-помеха  (1.56)
(1.56) , тем меньше ошибка в измерении доплеровского сдвига частоты, тем выше точность измерения и разрешающая способность по скорости. Из (1.55), (1.56) следует, что при совместном измерении расстояния и скорости необходимо использовать ШПС, так как только для ШПС можно независимо изменять и ширину спектра
, тем меньше ошибка в измерении доплеровского сдвига частоты, тем выше точность измерения и разрешающая способность по скорости. Из (1.55), (1.56) следует, что при совместном измерении расстояния и скорости необходимо использовать ШПС, так как только для ШПС можно независимо изменять и ширину спектра 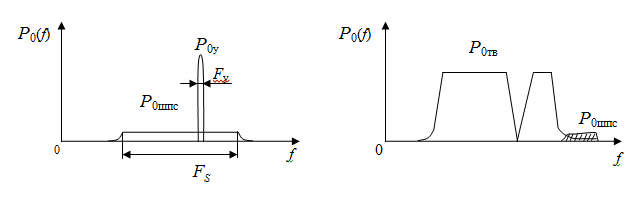



 , (1.34)
, (1.34) и
и  – двоичные сложные сигналы, соответствующие передаваемым символам
– двоичные сложные сигналы, соответствующие передаваемым символам  и
и  ;
;  – принимаемый сигнал; τ0 – длительность передаваемого символа (см. рисунок 1.1).
– принимаемый сигнал; τ0 – длительность передаваемого символа (см. рисунок 1.1). (1.35)
(1.35) – элемент сложного сигнала, получим
– элемент сложного сигнала, получим (1.36)
(1.36) и
и  могут принимать только два возможных значения
могут принимать только два возможных значения (1.37)
(1.37) (1.38)
(1.38) – двоичная функция, принимающая значения +1 и -1 и определяющая последовательность смены фаз элементов сложного сигнала.
– двоичная функция, принимающая значения +1 и -1 и определяющая последовательность смены фаз элементов сложного сигнала. (1.39)
(1.39)
 , где
, где  – номинальная частота абсолютно стабильного генератора, стробирующий импульс будет изменять свое местоположение в ту или иную сторону. Следовательно, через время
– номинальная частота абсолютно стабильного генератора, стробирующий импульс будет изменять свое местоположение в ту или иную сторону. Следовательно, через время  он может переместиться в середину соседнего импульса, т.е. на целый период регистрации. В телеграфных аппаратах частота
он может переместиться в середину соседнего импульса, т.е. на целый период регистрации. В телеграфных аппаратах частота  . С учетом наличия двух генераторов (на передаче и на приеме), в худшем случае имеющими отклонение частот от
. С учетом наличия двух генераторов (на передаче и на приеме), в худшем случае имеющими отклонение частот от  в разные стороны, получим
в разные стороны, получим  .
. ) и время, в течение которого строб достигнет границы установленной зоны (время поддержания синхронизма
) и время, в течение которого строб достигнет границы установленной зоны (время поддержания синхронизма  ),
),  .
. = 0,4 и значением коэффициента нестабильности генераторов
= 0,4 и значением коэффициента нестабильности генераторов  = 10-5, то при скорости дискретной модуляции В = 50 Бод время поддержания синхронизма составит 400 с (6 мин 40с). Если при тех же начальных условиях скорость дискретной модуляции увеличить до 2 400 Бод, то время поддержания синхронизма Тпс составит всего 8,33 с. Из этого следует, что меры по поддержанию синхронизма необходимы.
= 10-5, то при скорости дискретной модуляции В = 50 Бод время поддержания синхронизма составит 400 с (6 мин 40с). Если при тех же начальных условиях скорость дискретной модуляции увеличить до 2 400 Бод, то время поддержания синхронизма Тпс составит всего 8,33 с. Из этого следует, что меры по поддержанию синхронизма необходимы.






