Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Помехоустойчивость систем с АИМ.Содержание книги
Поиск на нашем сайте Для импульсных методов модуляции приведенную среднеквадратичную ошибку будем искать в виде
где Рассмотрим сигнал АИМ с прямоугольными видеоимпульсами с периодом повторения T 0 и длительностью импульсов t, равной
где Q – скважность передачи по времени. Рассмотрим линейную АИМ, при которой амплитуда импульса пропорциональна l(t)
где m – коэффициент глубины АИМ (m Сигнал на одном периоде повторения, начало которого совпадает с t=0, может быть записан в виде
где Для определения ошибки вычислим интеграл по (4.10)
Подставляя в (4.9) значение I, получим
Из (4.11) следует, что ошибка обратно пропорциональна отношению сигнал/помеха. Наименьшая ошибка будет при m =1. Чем больше скважность сигнала по времени, тем больше ошибка. Это объясняется тем, что с увеличением скважности при ограниченном динамическом диапазоне уменьшается энергия одного импульса. 3. структурная схема системы тУ-ТС с кодовым разделением сигналов. Устройства с временным кодовым разделением сигналов, называемые также цифровыми устройствами, обладающими неоспоримыми преимуществами, такими, как более высокая помехоустойчивость, лучшее использование канала связи, большая возможность унификации массового производства и применения в самых разнообразных условиях, несмотря на несколько большее число компонентов в системе на один сигнал. Эти преимущества более эффективны при использовании микропроцессорной техники. При кодовом разделении сигналов, каждый сигнал ТУ или ТС передается определенной комбинацией Кодовое разделение сигналов требует меньшего числа импульсов, чем циклическое временное разделение сигналов. Структурные схемы ПУ и КП системы ТУ-ТС приведены на рис. 2.9 и 2.10 соответственно. Устройство первичного кодирования кодирует адрес объекта, группы и саму команду первичным кодом, обычно двоичным. Эти кодовые комбинации обычно защищаются помехозащищенным кодом и совместно с синхросигналом через линейный блок поступают в линию связи.
Принятая из линии связи и восстановленная кодовая комбинация записывается в приемный регистр и одновременно анализируется устройством защиты от ошибок. Если искажений не обнаружено, исходная кодовая комбинация поступает в дешифратор, сигналы с выхода которого управляют выходными исполнительными элементами. Обеспечение синхронной и синфазной работы передатчика и приемника осуществляется сигналами с выхода селектора синхросигнала. Канал телесигнализации в случае, если применяется кодовое разделение сигналов ТС, по составу оборудования совпадает с каналом телеуправления. Если сообщения ТС передаются многоканальными методами, то каждому сигналу ТС соответствует импульс на соответствующей временной позиции. Экзаменационный билет № 22 1. структурная схема кп системы тр (рис. 3.2). Наряду с рассмотренными простейшими системами, выполняющими одну из функций ТИ, ТУ, ТС, порой добавляется и телерегулирование (ТР), представляющее собой телеуправление объектами с непрерывным множеством состояний (ГОСТ 26.005-82). Осуществляется ТР с помощью систем телеуправления и телеизмерения. Например, необходимо увеличить давление жидкости в трубопроводе до определенного уровня. Диспетчер посылает команду на включение насоса, нагнетающего жидкость в трубопровод, и по данным телеизмерения проверяет текущее значение давления. Когда давление достигает определенного значения, диспетчер посылает команду на отключение насоса. Структурные схемы ПУ и КП системы телерегулирования приведены на рис. 3.1 и 3.2 соответственно.
Рис. 3.1. Структурная схема ПУ системы телерегулирования
Всей работой ПУ и КП управляет блок задания режимов работы (БРР), который с помощью генератора тактовых импульсов (ГТИ) и распределителя импульсов (РИ) формирует управляющие, командные и тактовые сигналы, реализующие алгоритм работы всех блоков устройств по стандартному сопряжению в соответствии с системой приоритетов, периодически вырабатывающей синхросигнал для синхронизации всех устройств. Блок режима воспринимает коды функциональных адресов информации и преобразует их в управляющие сигналы для соответствующих блоков – приемников информации. Кроме того, БРР осуществляет кодирование и декодирование кодовых комбинаций в помехозащищенном коде. В БРР содержатся узлы контроля работоспособности оборудования ПУ, исправности линий связи и КП, а также элементы для выдачи сигналов неисправности. Число индивидуальных линейных блоков (ЛБ), устанавливаемых на ПУ, определяется числом подключенных КП. Прежде чем заниматься телерегулированием, необходимо получить информацию по каналу ТИ о состоянии объектов. Для чего необходимо сформировать и передать команду вызова телеизмерения текущих значений (ТИТ). Команды на ПУ вырабатываются либо диспетчером, либо ЭВМ. Команды поступают в блок управления вызова ТИТ (БУВ ТИТ) либо от ключей управления, расположенных на пульте диспетчера (ПД), либо от ЭВМ через блок сопряжения (БС). Правильность предаваемой команды диспетчер контролирует с помощью узла индикации команд (УИК), воспроизводящего команду на пульте диспетчера. Все команды, формируемые диспетчером, вводятся в ЭВМ. Структура сигнала вызова ТИТ состоит из синхросигнала, кода начала адреса пункта, функционального адреса, адреса объекта.
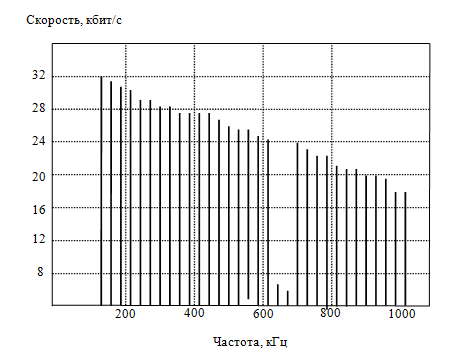
Рис. 3.2. Структурная схема КП системы телерегулирования На КП (см. рис. 3.2) сигнал от ЛБ поступает на узел синхронизации (УС), на который также поступают тактовые импульсы от ГТИ. УС подстраивает фазу тактовых импульсов и осуществляет поэлементный прием кода методом стробирования. Кодовая комбинация с выхода УС поступает в БРР, где осуществляется декодирование и формирование управляющих сигналов, посредством которых через блок управления передачей ТИТ (БУПД ТИТ) осуществляется передача телеизмеряемых величин от токовых датчиков (ДТ) и цифровых датчиков (ДЦ). Сообщения от ДТ поступают на вход БУПД ТИТ через аналоговый коммутатор (КДТ) и аналого-цифровой преобразователь (АЦП), а от ДЦ через цифровой коммутатор (КДЦ). Программа работы коммутаторов определяется БРР. БУПД ТИТ формирует код, который поступает в БРР. К этому коду в БРР добавляется код начала, адрес пункта, функциональный адрес и адрес объекта, и эта последовательность поступает через ЛБ в линию связи. Пришедшая на ПУ из линии связи кодовая комбинация через ЛБ поступает в БРР, который сличает принятый код адреса с адресом вызываемого сообщения, т.е. осуществляет проверку адреса при информационной обратной связи. После декодирования в БРР полезное сообщение поступает в БУПр ТИТ и в ЭВМ через БС, где оно запоминается, и поступает на устройство индикации команд (УИК) и одновременно на схему сравнения (СС), где оно сравнивается с соответствующей уставкой, записанной в блоке памяти уставок (БПУ). Если в результате сравнения будет принято решение о передаче команды на регуляторы, то формирование команды осуществляется либо диспетчером, либо ЭВМ, которая через БУПД ТИТ поступает в БРР. Правильность передаваемой команды диспетчер контролирует с помощью УИК. В блоке задания режимов работы к команде управления (задание уставок регуляторам) добавляются служебные сигналы аналогичные, как и при вызове ТИТ, и полное сообщение через ЛБ поступает в линию связи. При этом следует сказать, что допускается одновременная передача команды только одному регулятору. Команды регулирования по типу «больше – меньше» воспринимаются БРР (см. рис. 3.2). В блоке осуществляется проверка информации по методу повторения, проверка поступления команды только одному регулятору. При этом контролируется отсутствие аппаратурных искажений. Кодовые команды воспринимаются блоком управления приема телерегулирования (БУПР ТР), который обеспечивает контроль исправности элементов. Кодовая комбинация с БУПР ТР поступает либо непосредственно на регуляторы (при цифровом задании уставки), либо через ЦАП при задании уставки аналоговым сигналом. После завершения неискаженного приема на ПУ передается сигнал «квитанция», а на КП выходные исполнительные элементы в БУПР ТР будут находиться в замкнутом состоянии до тех пор, пока не поступит команда отмены ТР. 2. Многочастотные способы модуляции: DMT; OFDM. DMT-модуляция. Многочастотный способ модуляции (DMT – Discrete Multi Tone) не является принципиально новым. Формирование сигналов согласно DMT принципиально иное, чем у представленных выше. В отличие от КАМ-модуляции, в данном случае используется не одна, группа частот несущих колебаний. Применительно к конкретике xDSL-технологий весь расчётный частотный диапазон делится на несколько участков шириной по 4,3125 кГц. Каждый из этих участков используется для организации независимого канала передачи данных. На этапе вхождения в связь, а именно на этапе проверки качества линии, передатчик, исходя из уровня помех в частотном диапазоне участка, для каждого из отдельных каналов выбирает подходящую схему модуляции. На «чистых» частотных участках с малым уровнем шумов могут быть использованы методы с большими значениями спектральной плотности, например, КАМ-64. Очевидно, что использование такого принципа регулирования скорости передачи данных позволяет наиболее точно согласовывать параметры модулированного сигнала с параметрами линии, по которой он будет передаваться. При передаче данных информация распределяется между независимыми каналами пропорционально их пропускной способности, приёмник выполняет операцию демультиплексирования и восстанавливает исходный информационный поток. Рисунки 6.9 и 6.10 иллюстрируют описанный процесс адаптации. На рисунке 6.9 сплошной линией обозначена неадаптированная частотная характеристика передаваемого DMT-сигнала. Пунктиром выделена кривая зависимости затухания в линии от частоты передаваемого сигнала. Штрихпунктирной линией обозначена частотная помеха, которая постоянно действует на сравнительно небольшом участке в пределах рабочего диапазона частот передатчика. После выполнения операций согласования пропускной способности элементарных каналов с приведенными частотными характеристиками линии, зависимость скоростей передачи данных от частотного номера элементарного канала приведена на рисунке 6.10. Способ DMТ-модуляции это дальнейшее развитие идеи, составляющей основу КАМ. Этот способ может обеспечить высокую скорость и надежность передачи данных. К дополнительным достоинствам также относятся возможность оперативной и точной адаптации приемопередающих устройств к характеристикам конкретной линии. Не последним положительным фактором выступает практически повсеместное признание этого алгоритма стандартизирующими организациями. Недостатками DMT-модуляции можно считать его громоздкость и недостаточную технологичность.
Рисунок 6.9 - Пример условий адаптации DMT-передатчика
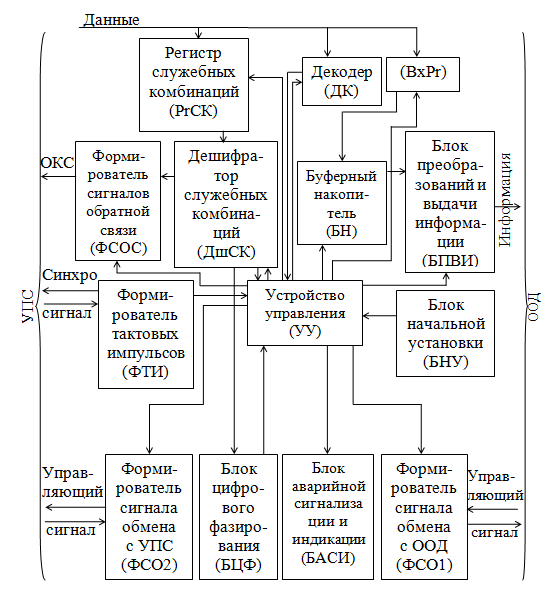
Рисунок 6.10 - Результат адаптации при использовании DMT-модуляции OFDM-модуляция. Способ OFDM (Orthogonal Frequency Division Multiplexing) является упрощенным вариантом DMT. В отличие от DMT, OFDM-модуляция использует единое значение спектральной эффективности для всех частотных каналов. Основные принципы формирования OFDM-модулированного сигнала соответствуют принципам формирования DMT-сигнала. Единственное, но существенное, отличие этихдвух методов заключатся в способе управления пропускной способностью отдельных элементарных каналов. Значения пропускной способности элементарных частотных каналов, которые формируются согласно DMT, могут отличаться в различных частотных диапазонах. Способ OFDM использует одно значение пропускной способности и скорости передачи данных для элементарных каналов всего частотного диапазона. К достоинствам многочастотных способов модуляции относятся обеспечение высоких скоростей передачи данных и способность нивелировать воздействие на сигнал помех, которые возникают в линии. Несомненным достоинством также является наличие для них стандартов ITU. По сложности реализации способ OFDM занимает промежуточную позицию между САР и DMT, что делает возможным его применение в малосерийных приложениях. Недостатком способа OFDM можно считать невозможность избирательной адаптации пропускной способности элементарных каналов к частотным характеристикам всего частотного канала. Элементарные частотные каналы OFDM должны быть разделены технологическими заградительными интервалами. Чем больше будет число элементарных частотных каналов, тем шире будет совокупная длина частотного интервала, который не может быть использован непосредственно для передачи данных. Следствием этого является меньшая эффективность использования полосы пропускания линии. 3. Приемная часть УЗО (рис. 7.2). В состав приемной части входят блоки: регистр служебных комбинаций (РгСК), декодер (ДК), входной регистр (ВхРг), формирователь сигналов обратной связи (ФСОС), дешифратор служебных комбинаций (ДшСК), буферный накопитель (БН), блок преобразования и выдачи информации (БПВИ), формирователь тактовых импульсов (ФТИ), устройство управления (УУ), блок начальной установки (БНУ), формирователи сигналов обмена с ООД и УПС (ФС01 и ФС02), блок циклового фазирования (БЦФ), блок аварийной, сигнализации и индикации (БАСИ). На приемной стороне с помощью УУ приемника происходит разделение служебных и информационных элементов. Первые записываются в РгСК, а вторые – во входной регистр ВхРг. ДшСК проверяет очередность и правильность поступления служебных комбинаций и информирует об этом УУ приемника. Одновременно ДК осуществляет декодирование принимаемого сообщения. Информационные элементы по мере заполнения ВхРг переписываются в БН. По завершении приема блока информации УУ приемника на основании данных о правильности приема служебных символов и отсутствии ошибок в принятом блоке, а также при наличии разрешающего сигнала с детектора уровня несущей (поступающего от УПС) разрешает выдачу информации ООД получателю. В блоке БПВИ осуществляются преобразование принятой последовательности в требуемый формат и согласование по уровню с уровнями ООД. Одновременно УУ приемника вырабатывает сигнал «Подтверждение», который формируется ФСОС и поступает в обратный канал связи. Если же при приеме блока информации нарушено хотя бы одно из принятых условий (искажены комбинации начала и конца блока или номер принятого блока не соответствует установленной очередности) либо в процессе декодирования обнаружена ошибка, происходит стирание принятого блока, а в обратный канал связи передается сигнал «Запрос». Блоки аварийной сигнализации и индикации УЗО обеспечивают сигнализацию предусмотренных аварийных ситуаций и их индикацию, а также индикацию режимов работы УЗО. Выходные сигналы этого блока используются для информирования оператора или ЭВМ.
Рисунок 7.2 - Структурная схема приёмной части устройства защиты от ошибок Экзаменационный билет № 23 1. структурная схема кп системы тр (рис. 3.2). Наряду с рассмотренными простейшими системами, выполняющими одну из функций ТИ, ТУ, ТС, порой добавляется и телерегулирование (ТР), представляющее собой телеуправление объектами с непрерывным множеством состояний (ГОСТ 26.005-82). Осуществляется ТР с помощью систем телеуправления и телеизмерения. Например, необходимо увеличить давление жидкости в трубопроводе до определенного уровня. Диспетчер посылает команду на включение насоса, нагнетающего жидкость в трубопровод, и по данным телеизмерения проверяет текущее значение давления. Когда давление достигает определенного значения, диспетчер посылает команду на отключение насоса. Структурные схемы ПУ и КП системы телерегулирования приведены на рис. 3.1 и 3.2 соответственно.
Рис. 3.1. Структурная схема ПУ системы телерегулирования Всей работой ПУ и КП управляет блок задания режимов работы (БРР), который с помощью генератора тактовых импульсов (ГТИ) и распределителя импульсов (РИ) формирует управляющие, командные и тактовые сигналы, реализующие алгоритм работы всех блоков устройств по стандартному сопряжению в соответствии с системой приоритетов, периодически вырабатывающей синхросигнал для синхронизации всех устройств. Блок режима воспринимает коды функциональных адресов информации и преобразует их в управляющие сигналы для соответствующих блоков – приемников информации. Кроме того, БРР осуществляет кодирование и декодирование кодовых комбинаций в помехозащищенном коде. В БРР содержатся узлы контроля работоспособности оборудования ПУ, исправности линий связи и КП, а также элементы для выдачи сигналов неисправности. Число индивидуальных линейных блоков (ЛБ), устанавливаемых на ПУ, определяется числом подключенных КП. Прежде чем заниматься телерегулированием, необходимо получить информацию по каналу ТИ о состоянии объектов. Для чего необходимо сформировать и передать команду вызова телеизмерения текущих значений (ТИТ). Команды на ПУ вырабатываются либо диспетчером, либо ЭВМ. Команды поступают в блок управления вызова ТИТ (БУВ ТИТ) либо от ключей управления, расположенных на пульте диспетчера (ПД), либо от ЭВМ через блок сопряжения (БС). Правильность предаваемой команды диспетчер контролирует с помощью узла индикации команд (УИК), воспроизводящего команду на пульте диспетчера. Все команды, формируемые диспетчером, вводятся в ЭВМ. Структура сигнала вызова ТИТ состоит из синхросигнала, кода начала адреса пункта, функционального адреса, адреса объекта.
Рис. 3.2. Структурная схема КП системы телерегулирования На КП (см. рис. 3.2) сигнал от ЛБ поступает на узел синхронизации (УС), на который также поступают тактовые импульсы от ГТИ. УС подстраивает фазу тактовых импульсов и осуществляет поэлементный прием кода методом стробирования. Кодовая комбинация с выхода УС поступает в БРР, где осуществляется декодирование и формирование управляющих сигналов, посредством которых через блок управления передачей ТИТ (БУПД ТИТ) осуществляется передача телеизмеряемых величин от токовых датчиков (ДТ) и цифровых датчиков (ДЦ). Сообщения от ДТ поступают на вход БУПД ТИТ через аналоговый коммутатор (КДТ) и аналого-цифровой преобразователь (АЦП), а от ДЦ через цифровой коммутатор (КДЦ). Программа работы коммутаторов определяется БРР. БУПД ТИТ формирует код, который поступает в БРР. К этому коду в БРР добавляется код начала, адрес пункта, функциональный адрес и адрес объекта, и эта последовательность поступает через ЛБ в линию связи. Пришедшая на ПУ из линии связи кодовая комбинация через ЛБ поступает в БРР, который сличает принятый код адреса с адресом вызываемого сообщения, т.е. осуществляет проверку адреса при информационной обратной связи. После декодирования в БРР полезное сообщение поступает в БУПр ТИТ и в ЭВМ через БС, где оно запоминается, и поступает на устройство индикации команд (УИК) и одновременно на схему сравнения (СС), где оно сравнивается с соответствующей уставкой, записанной в блоке памяти уставок (БПУ). Если в результате сравнения будет принято решение о передаче команды на регуляторы, то формирование команды осуществляется либо диспетчером, либо ЭВМ, которая через БУПД ТИТ поступает в БРР. Правильность передаваемой команды диспетчер контролирует с помощью УИК. В блоке задания режимов работы к команде управления (задание уставок регуляторам) добавляются служебные сигналы аналогичные, как и при вызове ТИТ, и полное сообщение через ЛБ поступает в линию связи. При этом следует сказать, что допускается одновременная передача команды только одному регулятору. Команды регулирования по типу «больше – меньше» воспринимаются БРР (см. рис. 3.2). В блоке осуществляется проверка информации по методу повторения, проверка поступления команды только одному регулятору. При этом контролируется отсутствие аппаратурных искажений. Кодовые команды воспринимаются блоком управления приема телерегулирования (БУПР ТР), который обеспечивает контроль исправности элементов. Кодовая комбинация с БУПР ТР поступает либо непосредственно на регуляторы (при цифровом задании уставки), либо через ЦАП при задании уставки аналоговым сигналом. После завершения неискаженного приема на ПУ передается сигнал «квитанция», а на КП выходные исполнительные элементы в БУПР ТР будут находиться в замкнутом состоянии до тех пор, пока не поступит команда отмены ТР. 2. Применение сложных сигналов для борьбы с помехами и в многолучевых каналах (п. 1.5; рис. 1.27; 1.28). Применение сложных сигналов позволяет в ряде случаев решать задачи передачи информации более успешно по сравнению с традиционными методами. К таким случаям можно отнести передачу информации по каналам с многолучевым эффектом распространения; ослабление мешающего действия различных систем, работающих в том же диапазоне частот; повышение эффективности использования выделенного диапазона частот; ослабление влияния узкополосных помех и т.п. Кроме этого, сложные сигналы открывают ряд возможностей построения систем с такими свойствами, которые не могут быть получены в системах с простыми сигналами: скрытность, крипто- и имитостойкость связи; возможность одновременно с передачей информации измерять координаты движущегося объекта, на котором расположена передающая часть системы, и т.д. Применение сложных сигналов в многолучевых каналах. Эффект многолучевого распространения в каналах со случайными параметрами приводит к появлению интерференции между соседними посылками сигнала и их замираниям. При простых сигналах влияние интерференции можно уменьшить, только увеличивая длительность посылок, что, естественно, приводит к уменьшению скорости передачи. Для ослабления существенных замираний уровня простые сигналы приходится принимать методами разнесенного приема. Применение сложных сигналов в ряде случаев позволяет решить задачу ослабления влияния интерференции и замираний более успешно. Рассмотрим для этого рисунок 1.27, на котором показаны огибающие одной посылки сложного сигнала, пришедшей по трем разным лучам. Полагаем, что замирания являются общими и за время, равное длительности посылки τ0, амплитуда и начальная фаза элементов сигнала не меняются. Оптимальная обработка посылки сложного сигнала корреляторами или согласованными фильтрами дает выходное напряжение, вид которого совпадает с корреляционной функцией этой посылки. Выходные напряжения, соответствующие одной и той же посылке и разным лучам, показаны на рисунке 1.27,б. Длительность основного лепестка этого напряжения приблизительно равна величине
Рисунок 1.27 – Огибающие сложного сигнала: Если база сигнала значительна (В >>1), то τвых << τ0и, следовательно, в результате обработки посылки происходит ее «сжатие» по времени. Нетрудно видеть, что при условии
выходные напряжения разделяются друг от друга несмотря на то, что на входе посылки от разных лучей перекрываются. Из (1.44) и (1.43) следует, что база сигнала, при которой обеспечивается разделение лучей с минимальной разностью запаздывания τ3min, должна удовлетворять условию
Так как огибающие посылки, пришедшей по разным лучам Оптимальная обработка посылок представляет собой линейную операцию, поэтому закон распределения выходных напряжений остается таким же, как и у огибающих. Если выходные напряжения обработать далее схемой, показанной на рисунке 1.28, а,то на ее выходе образуется последовательность импульсов со случайными амплитудами (рисунок 1.28, б), среди которых будет импульс с амплитудой
Рисунок 1.28 - Процесс обработки посылок:
Так как время запаздывания лучей и разность хода между ними случайны, то в общем случае необходимо применять линию с временем задержки
равным времени многолучевого растяжения сигнала, а отводы брать через интервалы, равные минимальному времени запаздывания ∆τ3min. Значения ∆τ3min и ∆τ3max определяются при экспериментальных исследованиях свойств конкретного канала. Таким образом, применение широкополосных сигналов позволяет разделить перекрывающиеся сигналы, приходящие по разным лучам. Это дает возможность эффективно использовать энергию сигналов от отдельных лучей и существенно ослабить влияние замираний, обусловленных эффектом многолучевого распространения. 3. Линейные коды (рис. 2.1; 2.2). Данные пользователя, поступающие от источников информации уже являются цифровыми, представленными в униполярном или биполярном коде без возврата к нулю – NRZ (NonReturn to Zero). При передаче данных на большие расстояния в коде NRZ возникают следующие проблемы: –с течением времени нарастает постоянный ток, блокируемый некоторыми электрическими устройствами цифрового тракта, например, трансформаторами, что приводит к искажению передаваемых импульсов; – изменение постоянного тока в цепи отрицательно сказывается на функционировании устройств, получающих питание от линии (репитеры или CSU); – передача длинных серий нулей или единиц приводит к нарушению правильной работы устройств синхронизации; – отсутствует возможность контроля возникающих ошибок на уровне физического канала. Перечисленные проблемы решаются при помощи методов линейного кодирования. Параметры получаемого линейного сигнала должны быть согласованы с характеристикой используемой линии и отвечать pяду следующих требований: – энергетический спектр линейного сигнала должен быть как можно уже. В нем должна отсутствовать постоянная составляющая, что позволяет повысить верность либо дальность передачи; – структура линейного сигнала должна обеспечивать возможность выделения тактовой частоты на приемной стороне; – обеспечение возможности постоянного контроля за ошибками на уровне физической линии; – линейный код должен имен достаточно простую техническую реализацию; – сигнал должен быть неполярным, т.е. полярность сигнальных проводников не должна иметь значения, в таком случае система передачи не боится ошибок типа «зеркальный прием», или «обратная работа» (инверсия знаков), а также переплюсовки контактов физической линии или используемых разъемов. Формирование требуемого энергетического спектра может быть осуществлено соответствующим изменением структуры импульсной последовательности и выбором нужной формы импульсов. Например, даже сокращение длительности импульсов в два раза (биимпульсный код с возвратом к нулю, RZ) вдвое уменьшает уровень постоянной составляющей и увеличивает уровень тактовой составляющей в спектре такого сигнала. Различают неалфавитные (1B1T, 1B1Q) и алфавитные (mВnВ, mВnТ, mBn Q) коды (В – двоичное, Т – троичное, Q – четверичное основание кода). В случае алфавитных кодов кодирующее устройство преобразует каждую группу из m символов (исходного алфавита) в новую группу из п символов (выходного алфавита), причем таким образом, чтобы примерно уровнять число нулей иединиц в передаваемой последовательности. Для одного и того же кода (с одинаковым обозначением) может существовать несколько отображений исходного алфавита на выходной. Предельной помехоустойчивостью обладают сигналы, элементы которых равны, но противоположны но полярности. Примеры популярных простых линейных кодов приведены на рисунке 2.2 и рисунке 2.3. Остановимся на некоторых из них детальней, но прежде рассмотрим структуру последовательного канала связи. Структура последовательного канала связи. Передача информации между достаточно удаленными устройствами требует представления ее в виде последовательного потока битов, характеристики которого зависят от особенностей конкретной системы. Физической основой такой системы является линия связи, которая обычно выполняется в виде витой пары проводов, коаксиального кабеля либо оптического кабеля. В зависимости от расстояния данные, передаваемые по линии, могут однократно или многократно подвергаться ретрансляции с целью восстановления амплитуды и временных характеристик (рисунок 2.1) [21, 71]
Рисунок 2.1 - Структура типового последовательного канала связи
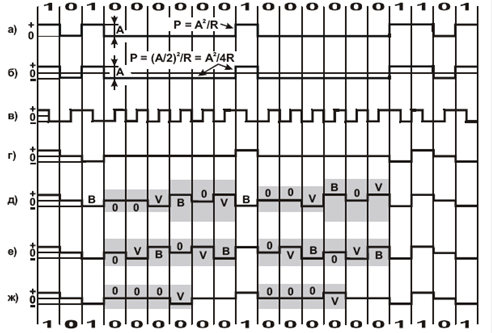
Алгоритмы работы передатчика, ретранслятора и приемника определяются выбранным кодом, предназначенным для передачи по линии, который называют линейным кодом. Униполярный код NRZ. Простейшим линейным кодом является униполярный код типа NRZ (Non Return to Zero), показанный на рисунке 2.2, а. В этом коде нули представлены отсутствием импульса (напряжение, близкое нулю), а единицы - наличием импульса (некоторое положительное напряжение). Этот код имеет четыре недостатка. - Средняя мощность, выделяемая на нагрузочном резисторе R (на рисунке не показан), равна А2/2R, где А -амплитуда импульса напряжения. Число 2 в знаменателе дроби соответствует равновероятному появлению лог. 0 и лог. 1 в потоке данных. Результат неутешительный. Резистор R рассеивает тепловую энергию в два раза интенсивнее, чем при биполярном кодировании (см. рисунок 2.2, б) при той же амплитуде сигнала, равной А.
Рисунок 2.2 - Наиболее распространенные линейные коды: - Униполярные сигналы всегда содержат постоянную составляющую и значительную долю низкочастотных компонентов в спектре при передаче длинных последовательностей единиц. Это препятствует передаче сигналов через трансформаторы или конденсаторы. - Ретрансляторы и приемники надежно восстанавливают синхронизирующую временную сетку только тогда, когда паузы между изменениями сигнала не слишком велики. Изменение сигнала после незначительной паузы позволяет всякий раз корректировать "ход часов" ретранслятора или приемника. С увеличением паузы надежность "службы времени" падает. Например, после передачи серии из 10 тыс. нулей приемник, вероятнее всего, не сможет точно определить, находится ли последующая единица на позиции 9999, 10000 или 10001. То же относится и к передаче длинных цепочек из лог. 1. Другими словами, при передаче достаточно большой последовательности нулей или единиц приемник (или ретранслятор) теряет синхронизацию с передатчиком (или ретранслятором). - Отсутствует возможность оперативной регистрации ошибок, таких как пропадание или появление лишних импульсов из-за помех. Экзаменационный билет № 24
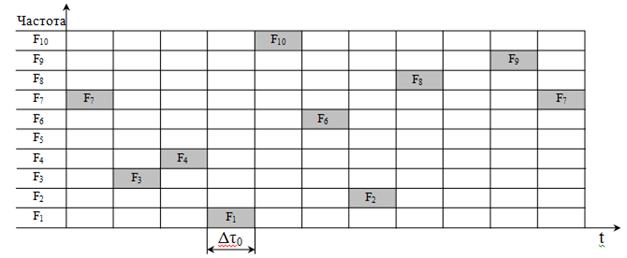
Для того, чтобы радиообмен нельзя было перехватить или подавить узкополосным шумом, было предложено ввести передачу с постоянной сменой несущей в пределах широкого диапазона частот. В результате мощность сигнала распределялась по всему диапазону, и прослушивание какой-то определенной частоты давало только небольшой шум. Последовательность несущих частот была псевдослучайной, известной только передатчику и приемнику. Попытка подавления сигнала в каком-то узком диапазоне также не слишком ухудшала сигнал, так как подавлялась только небольшая часть информации. Идею этого метода иллюстрирует рисунок 1.7. В течение фиксированного интервала времени передача ведется на неизменной несущей частоте. На каждой несущей частоте для передачи дискретной информации применяются стандартные методы модуляции, такие как FSK или PSK. Для того, чтобы приемник синхронизировался с передатчиком, для обозначения начала каждого периода передачи в течение некоторого времени передаются синхробиты. Так что полезная скорость этого метода кодирования оказывается меньше из-за постоянных накладных расходов на синхронизацию.
Рисунок 1.7 – Расширение спектра программной перестройкой частоты Структурная схема системы с программной перестройкой рабочей частоты (ППРЧ) приведена на рисунке 1.8. Несущая частота меняется в соответствии с номерами частотных подканалов, вырабатываемых алгоритмом генератора ПСП. Псевдослучайная последовательность зависит от некоторого параметра, который называют начальным числом. Если приемнику и передатчику известны алгоритм и значение начального числа, то они меняют частоты в одинаковой последовательности, называемой последовательностью псевдослучайной перестройки частоты. Если частоты смены подканалов ниже, чем скорость передачи данных в канале, то такой режим называют медленным расширением спектра (рисунок 1.9); в противном случае имеем дело с быстрым расширением спектра (рисунок 1.10). Поэтому выполняются следующие соотношения: Для медленной
|
|||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 418; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.017 с.) |

 , (4.9)
, (4.9) (4.10)
(4.10) , (4.11)
, (4.11) , (4.12)
, (4.12) 1).
1). , (4.13)
, (4.13)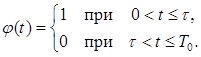
 .
. . (4.14)
. (4.14) импульсов, посылаемых последовательно во времени. Наибольшее количество комбинаций получается при использовании двоичного кода на все сочетания. В настоящее время в большинстве промышленных систем сигналы ТС передаются многоканальными методами.
импульсов, посылаемых последовательно во времени. Наибольшее количество комбинаций получается при использовании двоичного кода на все сочетания. В настоящее время в большинстве промышленных систем сигналы ТС передаются многоканальными методами.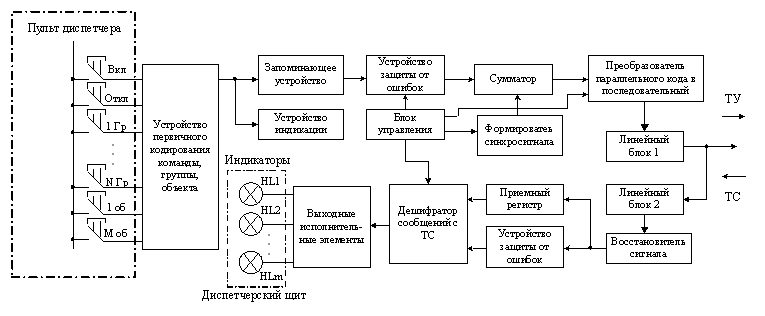 Рис. 2.9. Структурная схема ПУ системы ТУ-ТС с кодовым разделением сигналов
Рис. 2.9. Структурная схема ПУ системы ТУ-ТС с кодовым разделением сигналов Рис. 2.10. Структурная схема КП системы ТУ-ТС с кодовым разделением сигналов
Рис. 2.10. Структурная схема КП системы ТУ-ТС с кодовым разделением сигналов


 (1.43)
(1.43)
 (1.44)
(1.44) (1.45)
(1.45) ,
,  ,
,  , случайны, то случайны и выходные напряжения
, случайны, то случайны и выходные напряжения  ,
,  ,
,  .
. . Поскольку этот импульс представляет собой результат сложения трех импульсов со случайными амплитудами Ux 1, Ux 2и Ux 3, закон распределения величины Uxp изменится по сравнению с распределениями случайных величин Ux 1, Ux 2и Ux 3.В частности, если величины Ux 1, Ux 2и Ux 3подчиняются распределению Релея, то распределение Uxp определяется композицией этих распределений и, следовательно, замирания величин Uxp менее глубоки, чем замирания случайных величин Ux 1, Ux 2и U x3.Нетрудно видеть, что указанная процедура эквивалентна разнесенному приему с линейным сложением трех ветвей.
. Поскольку этот импульс представляет собой результат сложения трех импульсов со случайными амплитудами Ux 1, Ux 2и Ux 3, закон распределения величины Uxp изменится по сравнению с распределениями случайных величин Ux 1, Ux 2и Ux 3.В частности, если величины Ux 1, Ux 2и Ux 3подчиняются распределению Релея, то распределение Uxp определяется композицией этих распределений и, следовательно, замирания величин Uxp менее глубоки, чем замирания случайных величин Ux 1, Ux 2и U x3.Нетрудно видеть, что указанная процедура эквивалентна разнесенному приему с линейным сложением трех ветвей.