Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типовая структура цифровой САУ.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
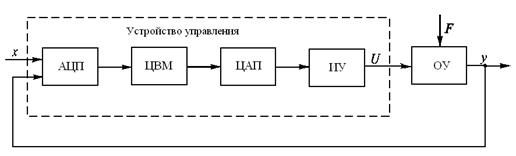
В современных САУ для реализации сложных алгоритмов управления применяют как аналоговые, так и цифровые ЭВМ. Аналоговые вычислительные устройства используют, например, для сложения и вычитания воздействий в контурах управления, вычитания производных и интегралов, построения перестраиваемых моделей ОУ в адаптивных системах, т.е. там, где реализуются основные достоинства аналоговой техники: большое быстродействие, возможность работы в реальном масштабе времени и непосредственного сопряжения с измерительными и исполнительными устройствами, относительная простота, высокая экономическая эффективность. Но недостаточные точность и помехоустойчивость аналоговых устройств, неудобство и ограниченные возможности программирования, а также все возрастающая сложность подлежащих реализации алгоритмов обуславливают применение цифровых ЭВМ. При использовании цифровой вычислительной техники в САУ необходимо преобразовывать аналоговые сигналы в цифровые при вводе их в цифровую вычислительную машину (ЦВМ) и цифровые сигналы в аналоговые при их выводе. Для этого используют соответственно аналого-цифровые (АЦП) и цифровые (ЦАП) преобразователи, рисунок 8.1.
ИУ – исполнительное устройство; ОУ – объект управления; U – управляющее воздействие; F – возмущающее воздействие Рисунок 8.1 Упрощенная структурная схема цифровой САУ
В САУ используют как специализированные цифровые вычислительные устройства, так и серийные ЦВМ. Специализированные вычислительные устройства управления, иначе называют цифровыми регуляторами, разрабатываются специально для конкретных САУ, т.е. использование их рационально в тех случаях, когда программы управления постоянны и перепрограммирование не требуется. В настоящее время для этих целей все шире применяют встроенные микропроцессоры, сочетающие в себе большие алгоритмические возможности с высокой экономической эффективностью (например, при построении систем числового программного управления станками и промышленными роботами-манипуляторами).
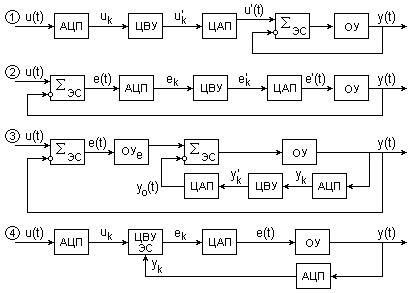
В системы автоматического управления ЦВУ можно включать вне замкнутого контура управления, в замкнутый контур управления и в качестве элемента сравнения. Наиболее характерные примеры включения ЦВУ в состав систем управления приведены на рис. 5.1.2.
Рис. 5.1.2.
В системах первого типа (ЦВУ вне замкнутого контура управления, рис. 5.1.2-1) с помощью аналогово-цифрового преобразователя (АЦП) непрерывное (аналоговое) воздействие u(t) преобразуется в цифровой код uk. ЦВУ на основании поступающей информации вырабатывает оптимальное задающее воздействие u'k. Последнее с помощью цифро-аналогового преобразователя (ЦАП) преобразуется в непрерывный сигнал u'(t) и поступает на элемент сравнения (ЭС) замкнутой системы, сигнал которого поступает на вход объекта управления (ОУ). Замкнутый контур системы может быть непрерывным либо импульсным. Достоинство такой ЦАС состоит в простоте изменения программы ЦВУ, в соответствии с которой вырабатывается задающее воздействие. В системах второго типа (ЦВУ в контуре управления, рис. 5.1.2-2) вычислительное устройство, включенное в прямую цепь замкнутого контура системы, выполняет функцию последовательного корректирующего устройства. В системах третьего типа (рис. 5.1.2-3) ЦВУ включено в цепь местной обратной связи, охватывающей непрерывную часть ОУ системы, и является параллельным корректирующим устройством. Цифровые корректирующие устройства в этих системах позволяют реализовать сложные алгоритмы управления. В системах четвертого типа (рис. 5.1.2-4) ЦВУ выполняет функции элемента сравнения и корректирующего устройства. В этой системе на цифровой элемент сравнения задающее воздействие uk и управляемая величина yk поступают в цифровой форме через соответствующие АЦП. На выходе элемента сравнения сигнал рассогласования также получается в виде кода ek. С помощью преобразователя ЦАП цифровой код преобразуется в непрерывный сигнал e(t), поступающий на ОУ системы. ЦАС четвертого типа обладает всеми качествами первого, второго и третьего типов, а благодаря более высокой разрешающей способности элемента сравнения обладает более высокой точностью. Преобразователи АЦП (аналог → код) являются устройствами, осуществляющими автоматическое преобразование непрерывно изменяющихся во времени аналоговых физических величин в дискретную цифровую форму с эквивалентными значениями числовых кодов в определенной системе счисления (двоичной, восьмеричной, десятичной и т.п.). В качестве входных аналоговых величин обычно действуют временные интервалы, углы поворота, электрические напряжения или токи, частота колебаний, фазовые сдвиги. Важной характеристикой АЦП является количество каналов, определяющее максимальное число датчиков аналоговых величин, которые могут быть одновременно подключены к преобразователю. Из множества применяемых преобразователей можно выделить три основных группы: 1) преобразователи пространственных перемещений и углов поворота в цифровой код; 2) преобразователи электрических величин (напряжений, токов, и др.) в код; 3) преобразователи интервалов времени в цифровой код. Преобразователи ЦАП (код → аналог) являются устройствами, осуществляющими автоматическое декодирование входных величин, представляемых числовыми кодами, в эквивалентные им значения какой-либо физической величины, чаще всего - напряжения. Для преобразования цифрового кода в напряжение используются сопротивления, соединенные с кодовым счетчиком по определенной схеме, включение которых на источник эталонного напряжения происходит в соответствии с декодируемым числом, при этом выходное напряжение, снимаемое с нагрузки, пропорционально декодируемому числу. Основным типом преобразователей код-напряжение являются преобразователи с суммированием напряжений на аттенюаторе сопротивлений. Чтобы преобразовать числа разных знаков, необходимо на входе схемы установить знаковый триггер, а на выходе схемы предусмотреть возможность получения напряжения разной полярности. Преобразователи обладают высоким быстродействием, достаточной точностью (точность преобразования может быть доведена до 0,05... 0,1 %), имеют сравнительно простую схему и обеспечивают пропорциональное преобразование кодов с числом разрядов n ≤ 10, что вполне достаточно для цифровых автоматических систем.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 1047; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.219.131 (0.008 с.) |