
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регулировка частоты вращения ДПТСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте
Уравнение (3.3) показывает, что для управления частотой вращения двигателя можно использовать напряжение на якоре, сопротивление цепи якоря и поток возбуждения. Ток якоря зависит от момента (3.4) и определяется нагрузкой двигателя, поэтому он не может быть параметром управления. Напряжение на якоре можно менять с помощью транзисторных или тиристорных регулируемых вторичных источников постоянного напряжения. Это наиболее удобный и современный способ. Он экономичен и обеспечивает "жесткие" характеристики, то есть при заданном напряжении якоря частота вращения мало зависит от момента (вследствие малого сопротивления цепи якоря, см. уравнения (3.3, 3.4)). В качестве регулируемого источника напряжения можно использовать ГПТ, однако это техническое решение морально устарело. Сопротивление цепи якоря изменяют посредством включения в нее дополнительных резисторов. Это позволяет регулировать частоту вращения ДПТ в широких пределах. Однако, характеристики двигателя получаются мягкими, что часто бывает неудобно, и в резисторах бесполезно выделяется большая мощность. Кроме того, обгорают контакты, подключающие резисторы. Все это ограничивает применение такого способа регулировки скорости. Поток возбуждения можно менять, регулируя ток возбуждения. Обычно это делают, включая в цепь возбуждения дополнительные резисторы. Если двигатель не последовательного возбуждения, то ток возбуждения намного меньше тока якоря. Поэтому в дополнительных резисторах выделяется сравнительно небольшая мощность. Механические характеристики получаются жесткими, что обычно и требуется. Однако, такой способ управления позволяет лишь увеличивать скорость двигателя, начиная с основной частоты вращения, которая достигается при максимальном потоке возбуждения. Регулировка напряжения и тока ГПТ В соответствии с (3.1 и 3.2) напряжение и ток ГПТ зависят от ЭДС генератора, которую можно регулировать, меняя поток возбуждения и (или) частоту вращения ГПТ. Поток возбуждения ГПТ можно легко и быстро изменять с помощью электронных устройств, позволяющих отслеживать состояние нагрузки и генератора. Можно также вручную включать в цепь возбуждения резисторы. Менять частоту вращения ГПТ часто бывает неудобно или невозможно, так как для этого нужно изменять частоту вращения двигателя, который приводит в действие генератор. Поэтому такой способ регулировки напряжения и тока ГПТ применяется мало.
Пуск и реверс ДПТ При разгоне двигателя вследствие малой скорости ЭДС вращения мала по сравнению с тем значением, которое она имеет в номинальном режиме. Поэтому напряжение источника питания при пуске уравновешивается в основном сопротивлением и током цепи якоря (3.1, 3.2). Сопротивление самого якоря очень мало, и при непосредственном включении ДПТ ток якоря будет в десятки раз больше номинального. Это может привести к перегрузке электрической цепи якоря и к механической аварии вследствие увеличения момента на валу двигателя. Для ограничения пускового тока последовательно с якорем включают дополнительные резисторы, которые по мере разгона выводят из цепи. Если двигатель питается от регулятора напряжения, то этот же регулятор используется для пуска. Чтобы реверсировать ДПТ, нужно изменить направление тока якоря или основного магнитного поля двигателя. Для этого надо поменять полярность включения якоря или обмоток возбуждения. Пуск ГПТ При пуске ГПТ с параллельным или смешанным возбуждением сопротивление нагрузки не должно быть меньше некоторого критического значения, иначе обмотка возбуждения не получит достаточно тока для создания нормального магнитного поля. Если сопротивление нагрузки меньше критического, то нужно сначала включить генератор и подождать, когда ток возбуждения и напряжение якоря достигнут номинальных значений, а затем подключать нагрузку. Синхронные машины Общая характеристика Синхронные машины (СМ) - это машины переменного тока. Они могут работать как двигатели или генераторы в зависимости от момента на валу. Они имеют следующие основные особенности: 1) Их частота вращения постоянна и равна частоте вращения магнитного поля асинхронных двигателей (см. п. 2):
где f – частота напряжения сети, к которой подключена СМ, р – число пар полюсов СМ, 60 - число секунд в минуте. Исключение составляют синхронные генераторы (СГ), работающие автономно, без параллельного подключения к другим источникам переменного напряжения (например, генераторы, питающие бортовые сети автомобилей). Частота вращения таких СГ определяется частотой вращения первичных двигателей, но она также связана с частотой напряжения формулой (4.1).
2) Сдвиг фаз между напряжением и током СМ можно регулировать, изменяя ток возбуждения. Это очень ценное качество позволяет использовать СМ не только по прямому назначению, но еще и для компенсации реактивного тока потребителей электроэнергии (для повышения cosj, см. п. 14). Назначение СГ вырабатывают электроэнергию на электростанциях - это самая важная область применения СМ. В последнее время СГ малой мощности используют для питания бортовых сетей транспортных средств, так как они проще, дешевле и надежнее, чем генераторы постоянного тока. При этом постоянное напряжение, нужное для бортовой сети, получают из синусоидального напряжения генератора с помощью выпрямителя. СГ используют также в передвижных дизельных электростанциях. По сравнению с асинхронными двигателями синхронные двигатели (СД) обладают меньшими габаритами и массой и большим к.п.д. Однако, для питания обмотки возбуждения им нужен дополнительный источник постоянного напряжения. Конструкция и пуск СД сложнее, чем у асинхронного двигателя с короткозамкнутым ротором. Пусковой момент СД меньше, чем у асинхронного двигателя с фазным ротором. Поэтому СД в основном применяются в очень мощных электроприводах с редкими пусками. СД используют также там, где нужна строго постоянная частота вращения. Иногда мощные СД применяют только как компенсаторы реактивного тока, без нагрузки на валу. Устройство Статор СМ устроен так же, как статор асинхронного двигателя (рис. 4.1). Сердечник статора - это пустотелый стальной цилиндр. Для подавления вихревых токов он набран из отдельных колец листовой электротехнической стали. На его внутренней поверхности имеются пазы, в которых уложена трехфазная обмотка из медного провода.
Ротор СМ – это электромагнит, обмотки которого питаются постоянным током возбуждения через контактные кольца и щетки. У маломощных СМ в качестве роторов используют постоянные магниты. Ротор реактивного СД - это просто зубчатый стальной цилиндр. Ротор СМ имеет столько же пар полюсов, сколько статор. Роторы СМ бывают явнополюсными и неявнополюсными. У явнополюсных роторов каждый полюс выполняется отдельно и имеет свою обмотку, у неявнополюсных полюса образуются за счет распределения обмотки в пазах цилиндрического сердечника. Сердечники роторов также набираются из отдельных стальных пластин, но более толстых, чем пластины статора, так как магнитное поле в роторе изменяется мало. Обмотки роторов делают из медного провода. СМ делают так, чтобы магнитное поле вдоль зазора машины было синусоидальным. При этом вдоль зазора укладывается р периодов поля, где р – число пар полюсов машины (рис. 4.3).
Принцип действия Разноименные полюса магнитов притягиваются – это явление создает вращающий момент СД или момент сопротивления СГ. Полюса ротора притягиваются к вращающимся полюсам статора, поэтому ротор вращается с той же скоростью, что и поле статора (синхронно, отсюда и название машины).
Вращающееся магнитное поле ротора наводит в неподвижной трехфазной обмотке статора синусоидальные ЭДС, которые создают трехфазное напряжение СГ или компенсируют часть трехфазного напряжения питания СД. ЭДС, наводимую в одной фазе статора полем ротора, мы обозначим
где k – коэффициент, зависящий от конструкции машины, n – частота вращения, Если момент на валу машины равен нулю, то полюса ротора располагаются точно напротив полюсов поля статора. Если на валу действует внешний вращающий (у СГ) или внешний тормозной (у СД) момент, то полюса ротора сдвигаются относительно полюсов статора на угол При этом получается, что у генератора ротор повернут относительно поля статора в сторону вращения (ротор как бы тащит за собой поле статора, совершая над ним работу), а у двигателя – противоположно вращению (поле статора приводит в движение ротор). Магнитное поле ротора – это основное поле машины, оно еще называется полем возбуждения, оно создается током возбуждения обмотки ротора. Магнитное поле статора складывается из поля ротора и поля, создаваемого током обмотки статора. Дополнительные пояснения.
Рассмотрим подробнее сказанное про угол q. Все рассуждения будем вести относительно одной фазы трехфазной обмотки статора. Обозначим через Если пренебречь малым активным сопротивлением фазы обмотки статора, то согласно закону электромагнитной индукции,
|
||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 578; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.181.181 (0.012 с.) |

 (об/мин), (4.1)
(об/мин), (4.1) Рис. 4.1. СМ с неявно-
полюсным ротором в разрезе
(схематический рисунок).
Рис. 4.1. СМ с неявно-
полюсным ротором в разрезе
(схематический рисунок).
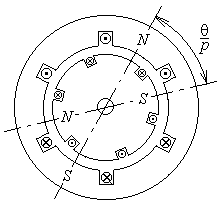 Рис. 4.2. Сдвиг между осями
магнитных полей ротора
и статора СМ на угол q.
Рис. 4.2. Сдвиг между осями
магнитных полей ротора
и статора СМ на угол q.
 . Согласно закону электромагнитной индукции,
. Согласно закону электромагнитной индукции,  , (4.2)
, (4.2) – ток возбуждения.
– ток возбуждения. , где р – число пар полюсов СМ, q – сдвиг фаз между напряжением фазы статора
, где р – число пар полюсов СМ, q – сдвиг фаз между напряжением фазы статора  и ЭДС фазы статора
и ЭДС фазы статора  .
.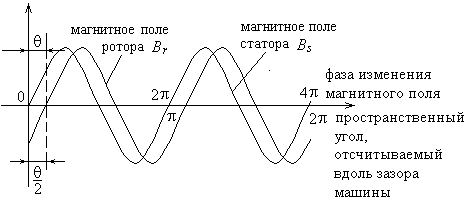 Рис. 4.3. Изменение магнитного поля вдоль зазора СМ
с двумя парами полюсов.
Рис. 4.3. Изменение магнитного поля вдоль зазора СМ
с двумя парами полюсов.
 ЭДС, наводимую в фазе обмотке статора вращающимся полем статора.
ЭДС, наводимую в фазе обмотке статора вращающимся полем статора. . Поэтому сдвиг фаз q между
. Поэтому сдвиг фаз q между  , то фазовому сдвигу синусоид q соответствует пространственный угол сдвига осей магнитных полей ротора и статора
, то фазовому сдвигу синусоид q соответствует пространственный угол сдвига осей магнитных полей ротора и статора 


