
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Подключение синхронного генератора параллельно сетиСодержание книги Поиск на нашем сайте
Несколько СГ могут работать параллельно на общую нагрузку. Так работают генераторы на электростанциях. Чтобы подключить генератор к сети, вначале его нужно раскрутить до скорости, близкой к синхронной. Затем надо установить такой ток возбуждения, чтобы действующее значение напряжения СГ было равно напряжению сети. После этого, отслеживая с помощью вольтметра разность мгновенных значений напряжения сети и генератора, нужно подключить генератор в момент, когда эта разность будет равна нулю. После этого можно увеличить момент на валу генератора и регулировать ток возбуждения, генератор начнет отдавать мощность в сеть. Пуск синхронного двигателя Чтобы пустить в ход СД, его нужно вначале раскрутить до скорости, близкой к синхронной. Это делают либо с помощью вспомогательного двигателя, либо с помощью специальной короткозамкнутой пусковой обмотки, находящейся на роторе самого СД. Благодаря этой обмотке во время пуска СД работает как асинхронный двигатель с короткозамкнутым ротором (асинхронный пуск). После разгона с помощью пусковой обмотки надо включить ток возбуждения, при этом двигатель втянется в синхронизм и перейдет в свой основной рабочий режим. Нагрузку на валу СД во время пуска нужно максимально снизить (если есть такая возможность). Регулировка активной мощности СМ Так как скорость вращения СМ при подключении их к промышленной сети постоянна, то их активная мощность пропорциональна моменту на валу. В режиме СГ момент зависит от работы первичного двигателя, вращающего СГ, в режиме СД момент зависит от нагрузки СД. Активная мощность автономных СГ определяется скоростью вращения и моментом на валу.
СМ малой мощности
Недостатком рассмотренной конструкции синхронной машины является наличие подвижных контактов и необходимость дополнительного источника постоянного тока для питания обмотки ротора. Машины малой мощности свободны от этих проблем. В СМ малой мощности ротором служит постоянный магнит. Пуск такого двигателя в ход осуществляется обычно непосредственным подключением его фазных обмоток статора к электрической системе. Для возникновения асинхронного момента при пуске двигателя в парах полюсов постоянного магнита располагаются стержни короткозамкнутой обмотки.
Другой разновидностью синхронных машин малой мощности являются так называемые синхронные реактивные двигатели. Их особенность заключается в том, что ротор имеет магнитную анизотропию, т. е. различное магнитное сопротивление в различных радиальных направлениях. Ротором может быть зубчатый цилиндр из пластин электротехнической стали или пакет стальных пластин, закрепленный в цилиндрической алюминиевой отливке. Отливка одновременно служит короткозамкнутой пусковой обмоткой. Общим недостатком синхронных машин малой мощности является отсутствие возможности регулировать реактивную мощность и запас устойчивости. Реактивные индукторные машины
Общая характеристика Реактивные индукторные двигатели (РИД, в международной классификации SRM – switched reluctant motors, принудительно переключаемые моторы) появились сравнительно недавно и сегодня получают все большее распространение. Такие двигатели имеют очень простую конструкцию (рис. 5.1, 5.2), вследствие чего они получаются дешевыми в производстве, а также надежными и требующими минимального обслуживания в эксплуатации. РИД можно назвать наиболее универсальными, современными и перспективными электродвигателями. РИД питаются от источника постоянного напряжения, чаще всего от выпрямителя, подключенного к промышленной сети, или бортовой сети мощного транспортного средства (корабля, тепловоза, трактора, карьерного самосвала). Для управления током обмоток двигателя используют инверторы - схемы на основе транзисторов IGBT (реже - на основе выключаемых тиристоров).
То, что для работы РИД необходим довольно сложный и дорогой инвертор (как правило, с микропроцессорным управлением), является недостатком двигателя. Однако это определяет и его преимущества – возможность очень гибкого управления, обеспечивающего регулировку момента и скорости в любых режимах работы, а также очень высокий к.п.д. (больше 90%). РИД не имеют подвижных контактов и свободны от связанных с ними проблем (искрения, износа и необходимости частого обслуживания). К недостаткам РИД можно отнести еще то, что его обмотки потребляют ток в импульсном режиме, и приходится принимать специальные меры, чтобы мощные импульсы тока не проникали в питающую сеть. Реактивная индукторная машина (РИМ) может работать как в двигательном, так и в генераторном режиме.
Устройство РИМ устроена в принципе так же, как шаговый двигатель (рис. 5.1, 5.2). Она имеет статор, набранный из отдельных фигурных колец электротехнической стали. Внутри сердечник статора имеет зубцы, на которые надеты обмотки из изолированного медного провода. Соответствующие обмотки статора соединяются между собой, образуя фазы двигателя. РИМ обычно имеют не меньше 3 фаз. Высокоскоростные РИМ чаще всего однофазные. Ротор представляет собой зубчатый цилиндр из электротехнической стали. Сердечники статора и ротора набираются из отдельных пластин, изоляция между которыми подавляет вихревые токи.
Подключение обмоток РИМ и устройство инвертора показано на рис. 5.3. Катушка L 1, и конденсатор С 1 образуют фильтр, который обменивается энергией с фазами двигателя и препятствует проникновению импульсов тока РИМ в сеть. Этот фильтр также подавляет пульсации напряжения выпрямителя. Катушки La, Lb, Lc - это фазы РИМ. Принцип действия РИД Вначале рассмотрим инвертор. Попарное открытие транзисторов VT 1 и VT 2, VT 3 и VT 4, VT 5 и VT 6 подключает питание к фазам двигателя (восходящие части кривых на рис. 5.4, 5.5). Если закрывается один транзистор фазы двигателя, то эта фаза закорачивается и пропускает свой остаточный ток через соответствующий диод (спадающие части кривых в верхней части рис. 5.5). Например, если закрывается VT 1, то ток катушки La течет через VT 2 и VD 1. Если оба транзистора фазы закрываются, то катушки фазы отдают энергию конденсатору, питая его через оба диода своей фазы (спадающие до нуля части кривых на рис. 5.4, 5.5). Принцип действия РИД похож на принцип действия шагового двигателя. Когда в обмотке какой-либо фазы течет ток, зубцы ротора притягиваются к зубцам этой фазы. После того как зубцы ротора окажутся напротив зубцов этой фазы, ток в ней отключается, и в это же время включается ток в обмотке другой фазы, зубцы которой в свою очередь начинают притягивать к себе зубцы ротора. Реально токи фаз включаются с перекрытием, так что в то время как одна фаза еще не полностью отработала, уже включается фаза, следующая ей на смену (рис. 5.4, 5.5). Благодаря этому пульсации момента двигателя получаются небольшими. На рис. 5.2 изображен момент, когда фаза А полностью отработала, и на смену ей включается фаза В. Это примерно соответствует t = 0,069 с на рис. 5.3 и t = 0,074 с на рис. 5.4.
На больших скоростях ток фазы не успевает нарасти до недопустимо больших значений за одно включение, поэтому в течение рабочего цикла фаза двигателя включается и отключается один раз. Такой режим называется однопульсным (рис. 5.4). На малых скоростях рост тока фазы приходится ограничивать периодическим отключением, поэтому он изменяется в пределах так называемого токового коридора. Такой режим называется режимом ограничения тока (рис. 5.5).
Замечание. Отличие РИД от шагового двигателя состоит в том, что шаговый двигатель, как правило, останавливается после каждого переключения токов в обмотках, поворачиваясь на угол, определенный конструкцией двигателя, а РИД вращается непрерывно и плавно. Шаговые двигатели обычно сделаны так, чтобы обеспечивать малые углы поворота, а также быстрый старт, а затем резкую остановку после поворота на заданный угол. Шаговые двигатели обычно бывают небольшими, в то время как РИД могут быть и очень маленькими, и очень большими.
Генераторный режим РИМ чаще используются в качестве двигателей, однако они также применяются в генераторном режиме. При этом ток в фазе включается в момент, когда зубцы ротора находятся близко к зубцам статора этой фазы. Зубцы ротора и статора притягиваются друг к другу, и на преодоление этого притяжения первичный двигатель затрачивает энергию. Эта энергия поступает через инвертор к нагрузке. Ток фазы отключается, когда зубцы ротора находятся близко к пазам статора. Генераторный режим неустойчив, для стабилизации напряжения нужно использовать регуляторы.
Литература
1. Касаткин А.С., Немцов М.В. Электротехника: Учебное пособие для вузов. – 4-е издание, переработанное. - М.: Энергоатомиздат, 1983. – 440 с. 2. Борисов Ю.М. и др. Электротехника / Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. Учебник для вузов. – 2-е издание, переработанное и дополненное. – М.: Энергоатомиздат, 1985. – 552 с. 3. Костенко М.П., Пиотровский Л.М. Электрические машины: учебник для вузов. – М.: Госэнергоиздат, 1956. – 459 с. 4. Костенко М.П. Электрические машины: учебник для ВУЗов. – Ленинград: Гостехиздат, 1944 г. – 654 с.
|
||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 319; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.101.7 (0.011 с.) |

 Рис. 5.1. Конструкция РИД.
Рис. 5.1. Конструкция РИД.
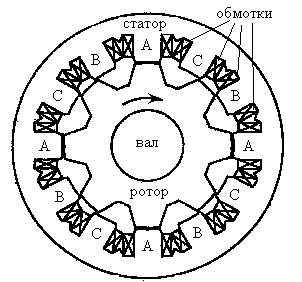 Рис. 5.2. Поперечный разрез РИД.
А, В, С – зубцы соответствующих фаз статора.
Рис. 5.2. Поперечный разрез РИД.
А, В, С – зубцы соответствующих фаз статора.
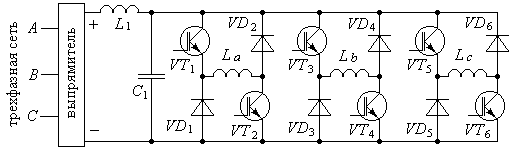 Рис. 5.3. Подключение обмоток РИМ. Устройство инвертора.
Цепи управления транзисторов не показаны.
Рис. 5.3. Подключение обмоток РИМ. Устройство инвертора.
Цепи управления транзисторов не показаны.
 Рис. 5.4. Токи фаз РИД в однопульсном режиме (400 об/мин).
Рис. 5.4. Токи фаз РИД в однопульсном режиме (400 об/мин).
 Рис. 5.5. Токи фаз РИД в режиме ограничения тока (200 об/мин).
Рис. 5.5. Токи фаз РИД в режиме ограничения тока (200 об/мин).



