
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Новочеркасский ордена Трудового Красного ЗнамениСодержание книги Поиск на нашем сайте
Новочеркасский ордена Трудового Красного Знамени Политехнический институт имени Серго Орджоникидзе
Трансформаторы И электрические машины конспект лекций по курсу общей электротехники
Новочеркасск 2007 Трансформаторы Назначение Трансформаторы служат для преобразования переменных напряжений и токов. Конкретные назначения и типы трансформаторов очень разнообразны. В энергетике трансформаторы применяются для повышения синусоидальных напряжений в начале и понижения их в конце линий электропередач. Это позволяет многократно уменьшить потери энергии в линиях. Устройство Трансформатор представляет собой несколько магнитно связанных катушек индуктивности, которые имеют общий сердечник из стальных пластин или феррита. Одна или несколько обмоток подключаются к источникам питания. Эти обмотки называются первичными. Другие обмотки подключаются к элементам нагрузки и называются вторичными. Стальные сердечники набирают из отдельных пластин, чтобы уменьшить нагревание и потери энергии от вихревых токов, возникающих вследствие изменения магнитного поля. Принцип действия Токи первичных обмоток создают магнитное поле в сердечнике и компенсируют размагничивающее действие токов вторичных обмоток. Переменное магнитное поле в сердечнике по закону электромагнитной индукции создает на вторичных обмотках напряжение, которое питает нагрузку. Сердечник служит для усиления магнитного поля. Дополнительные пояснения (на экзамен не выносятся) Первичную обмотку подключим к источнику напряжения. Вначале рассмотрим режим холостого хода, то есть работу трансформатора при разомкнутой вторичной обмотке. Согласно закону полного тока, ток первичной обмотки создает в сердечнике магнитное поле. Согласно закону электромагнитной индукции, изменение этого поля во времени превращает обе обмотки в источники ЭДС, причем ЭДС первичной обмотки направлена противоположно ЭДС источника и почти полностью ее компенсирует. Это приводит к тому, что ток холостого хода составляет лишь несколько процентов от номинального. В этом режиме трансформатор представляет собой просто катушку индуктивности с большим индуктивным сопротивлением.
Если вторичную обмотку подключить к сопротивлению нагрузки, то в ней появится ток. Он ослабит магнитное поле в сердечнике, но это приведет к уменьшению ЭДС первичной обмотки и вследствие этого к увеличению ее тока. Это увеличение компенсирует магнитное действие вторичной обмотки, и магнитное поле в сердечнике останется почти таким же, как в режиме холостого хода. Идеальный трансформатор Будем считать, что сопротивления обмоток и потери энергии в сердечнике равны нулю, все магнитное поле сосредоточено в сердечнике, магнитная проницаемость сердечника стремится к бесконечности. Такая модель называется идеальным трансформатором. Она описывает работу трансформатора с точностью до нескольких процентов. Получим уравнения этой модели. Рассмотрим двухобмоточный трансформатор (рис. 1.1). Примем, что индукция и напряженность магнитного поля связаны уравнением
Примем также, что токи обмоток (а вследствие этого также напряженность магнитного поля, магнитная индукция и магнитный поток в сердечнике) – произвольные периодические функции времени с нулевой постоянной составляющей. Введем обозначения: w 1, w 2 – число витков первичной и вторичной обмотки соответственно, l – длина средней линии сердечника, S – площадь поперечного сечения сердечника, Ф – магнитный поток в сердечнике. По закону электромагнитной индукции
откуда Это уравнение напряжений идеального трансформатора: напряжения обмоток пропорциональны числу витков. По закону полного тока Так как индукция магнитного поля в сердечнике ограничена (
Из последнего уравнения следует, что ток холостого хода идеального трансформатора равен нулю (у реальных трансформаторов он составляет несколько процентов от номинального). Отметим, что Число Вносимое сопротивление
Здесь и далее будем рассматривать трансформатор в синусоидальном режиме. Определим, как подействует на цепь первичной обмотки идеального трансформатора подключение к его вторичной обмотке сопротивления нагрузки Z. Для этого вычислим отношение напряжения и тока первичной обмотки:
То есть, включение идеального трансформатора с нагрузкой Z в любую электрическую цепь эквивалентно непосредственному включению в эту цепь сопротивления Упрощенная схема замещения трансформатора Следующая по сложности модель трансформатора показана на схеме рис. 1.3. Она называется упрощенной, так как не учитывает ток холостого хода. Она позволяет рассчитать токи обмоток и напряжение нагрузки точнее, чем по уравнениям идеального трансформатора. Сам трансформатор представлен сопротивлениями
Резистор При замене сопротивления нагрузки Z вносимым сопротивлением k 2 Z оно включается в первичную цепь. Напряжение нагрузки увеличивается в k раз, а ток уменьшается в k раз. Это называется приведением нагрузки к первичной цепи. Напряжение Опыт короткого замыкания Для определения
В паспортных данных трансформаторов указывают относительную величину В опыте короткого замыкания измеряют напряжение, ток и потребляемую мощность первичной обмотки трансформатора. Сопротивления
т.к.
Внешняя характеристика трансформатора Зависимость напряжения нагрузки от тока нагрузки называется внешней характеристикой трансформатора. Ее типичный график показан на рис. 1.5. Чтобы записать формулу для ее расчета, введем дополнительные обозначения:
Внешняя характеристика трансформатора рассчитывается по формуле
где относительная потеря напряжения
Вывод формулы для расчета внешней характеристики (на экзамен не выносится) Вначале покажем, что потерю напряжения можно вычислить по формуле
Рассмотрим векторную диаграмму напряжений и токов упрощенной схемы замещения трансформатора (рис. 1.6). Начальную фазу напряжения нагрузки Фаза напряжения на резисторе
Кроме того, Нам нужно найти потерю напряжения (разность действующих значений)
Выразим действующие значения напряжений через действительные и мнимые части их комплексов:
т.к.
Подставляя формулы (1-9) и (1-10) в (1-8), получим:
Из последнего уравнения с учетом (1-6) и (1-7) получим:
Из формулы (1-9) при номинальном значении первичного напряжения
где
Если относительную потерю напряжения выразить в процентах Полная схема замещения трансформатора
Чтобы учесть ток холостого хода трансформатора, к упрощенной схеме замещения нужно добавить еще одну ветвь (рис. 1.7). Она называется намагничивающей. По ней протекает ток холостого хода трансформатора. Резистор Резистор
Опыт холостого хода
Для определения сопротивлений
В паспорте трансформатора указывают мощность потерь холостого хода Р 0, а также ток холостого хода в процентах от номинального тока первичной обмотки: К. п. д. трансформатора К. п. д. трансформатора – это отношение полезной мощности к потребляемой: Полезная мощность нагрузки – это ее активная мощность, то есть скорость перевода электрической энергии в другие формы: Активная мощность, потребляемая трансформатором из сети, складывается из мощности нагрузки, мощности потерь в сердечнике и в обмотках: Потерями энергии в обмотках в опыте холостого хода можно пренебречь, так как ток первичной обмотки очень мал, а ток вторичной обмотки равен нулю. Поэтому мощность потерь энергии
В опыте короткого замыкания можно пренебречь потерями энергии в сердечнике, так как напряжение составляет всего несколько процентов от номинального, а потери в сердечнике приблизительно пропорциональны его квадрату. Поэтому мощность потерь энергии в опыте короткого замыкания примерно равна мощности потерь в обмотках при номинальном режиме. Потери в обмотках Силовые трансформаторы конструируют так, чтобы максимум к. п. д. соответствовал наиболее вероятному значению Даже у маломощных трансформаторов в режимах, близких к номинальному, к. п. д. обычно больше 0,9, а у мощных он превышает 0,99. Трехфазные трансформаторы
В трехфазных цепях можно применять отдельный однофазный трансформатор для каждой фазы (рис. 1.10). Это дает преимущества при транспортировке, монтаже, ремонте и обслуживании трансформаторов. Однако, для всех трех фаз можно использовать один сердечник, разместив обмотки фаз на разных стержнях (рис. 1.11). Это дает экономию электротехнических материалов и обеспечивает компактность конструкции. Такой вариант применяется чаще. Сумма магнитных потоков в узле магнитопровода должна быть равна нулю по первому закону Кирхгофа для магнитных цепей:
Начала первичных обмоток понижающих трехфазных трансформаторов обозначаются буквами A, B, C, а их концы – буквами X, Y, Z. Начала и концы вторичных обмоток обозначаются соответственно a, b, c и x, y, z (рис.1.10). Обмотки трехфазных трансформаторов соединяются звездой или треугольником. Эти виды соединения обозначаются соответственно Y и D. Соединение звездой с выведенной нейтральной точкой обозначается YN. или Y0. Сочетание соединения первичных и вторичных обмоток называется группой соединения. В обозначении группы соединения слева указывается способ соединения первичной обмотки, справа – вторичной. Например, запись Y/D означает, что первичные обмотки соединяются звездой, а вторичные – треугольником. Группы соединения Y/Y и Y/YN отмечаются числом 12, сдвиг фаз первичных напряжений таких трансформаторов относительно вторичных равен нулю. Группа Y/D отмечается числом 11, сдвиг фаз первичных напряжений трансформаторов этой группы относительно вторичных равен 30о. В СССР (России) выпускаются трансформаторы трех групп соединения: Y/Y‑12, Y/YN-12 и Y/D-11. Тормозные режимы Иногда механизмы нужно не только вращать, но и время от времени тормозить. Механические тормоза быстро изнашиваются и не позволяют использовать энергию торможения. Кроме того, они представляют собой дополнительные конструкции, а двигатели есть в электроприводах в любом случае. Поэтому двигатели удобно применять и в качестве тормозов. Генераторный режим Обмотки статора, как обычно, подключаются к трехфазной сети. Двигатель вращается в ту же сторону, что и в режиме холостого хода, но быстрее, чем в режиме холостого хода ( Динамический режим Обмотки статора подключаются к низковольтному источнику постоянного напряжения. Токи обмоток статора создают в двигателе постоянное магнитное поле. Как и в двигательном режиме, при вращении магнитного поля внутри ротора в его обмотке наводятся вихревые токи. Поэтому по закону Ампера со стороны магнитного поля статора на ротор действуют силы, создающие тормозной момент (рис. 2.12). Энергия торможения выделяется в роторе в виде тепла. Торможение возможно на малых скоростях. Регулируя ток в обмотках статора, можно изменять тормозной момент. Другие режимы
Возможны также другие тормозные режимы, например, конденсаторный, при котором обмотки статора подключаются к конденсаторам, и противовключение, при котором двигатель подключается к сети, но вращается в сторону, противоположную направлению вращения в режиме холостого хода. Эти режимы применяются реже, т.к. приводят к дополнительному выделению энергии в обмотках статора, что обычно нежелательно. Машины постоянного тока Двигатели и генераторы постоянного тока имеют одну конструкцию, поэтому носят общее название "машины постоянного тока" (МПТ). Двигателем или генератором машина становится в зависимости от режима работы.
Общая характеристика двигателей Основные достоинства: легкость регулировки скорости, большой пусковой момент, большая перегрузочная способность. Основные недостатки: относительная дороговизна и сложность конструкции, необходимость обслуживания коллекторно-щеточного узла, а также его износ и искрение. Основная область применения: регулируемый привод постоянного тока. Общая характеристика генераторов Генераторы постоянного тока (ГПТ)- это регулируемые источники постоянного напряжения. Их применяют в качестве источников питания бортовой сети транспортных средств, а также в промышленности для питания двигателей постоянного тока и других устройств. Некоторые ГПТ позволяют получить большие токи, необходимые, например, для питания электролитических ванн или электросварки. В настоящее время вместо ГПТ все чаще применяют полупроводниковые выпрямители, в том числе управляемые. Для их питания используют промышленную сеть или автономные синхронные генераторы. Устройство МПТ МПТ состоит из неподвижного статора и вращающегося внутри него ротора. Статор МПТ иногда называют индуктором, а ротор чаще всего называют якорем. Цилиндрический стальной корпус статора одновременно служит магнитопроводом. Изнутри к нему крепятся главные полюса с обмотками возбуждения, а также дополнительные полюса со своими обмотками. Для подавления вихревых токов стальной сердечник якоря набирается из отдельных изолированных пластин. В его пазах укладывается обмотка (рис. 3.1). Коллектор расположен на валу машины. Он состоит из изолированных медных пластин, составляющих цилиндрическую поверхность. К этой поверхности прижимаются графитовые щетки, закрепленные на статоре. К пластинам коллектора подключены секции обмотки якоря (рис. 3.2, 3.3). Принцип действия МПТ Ток в обмотках возбуждения создает основное магнитное поле машины. В этом поле находятся проводники обмотки якоря, по которым течет ток. На них действует сила Ампера. Она действует также и на носители микротоков, возбуждаемых токами обмотки якоря на поверхности его сердечника. Эта сила создает вращающий момент двигателя или момент сопротивления генератора. Обмотки якоря движутся в магнитном поле статора. Согласно закону электромагнитной индукции это приводит к возникновению в них ЭДС, которая называется ЭДС вращения Она создает напряжение и ток якоря ГПТ. В режиме двигателя она направлена противоположно ЭДС источника питания и компенсирует большую часть его напряжения. Вращаясь, пластины коллектора поочередно подключают к щеткам секции обмотки якоря. Это происходит так, что в проводниках, расположенных под каждым из основных полюсов, ток все время течет в одном направлении и создает постоянный крутящий момент. В режиме генератора коллекторно-щеточный узел работает как механический выпрямитель, обеспечивая практически постоянное напряжение на щетках. Дополнительные полюса устраняют искажение основного магнитного поля, возникающее от токов обмотки якоря. В обмотках дополнительных полюсов течет ток якоря. В машинах малой мощности дополнительные полюса не устанавливают. Классификация по способам возбуждения. Механические характеристики двигателей и внешние характеристики генераторов. Конструкции МПТ и их характеристики различаются в зависимости от способа подключения обмоток возбуждения. Механической характеристикой двигателя называется зависимость его частоты вращения и момента. Внешней характеристикой генератора называется зависимость его напряжения от тока нагрузки. Характеристикой холостого хода генератора называется зависимость напряжения холостого хода от тока возбуждения. Регулировочной характеристикой генератора называется зависимость тока возбуждения от тока нагрузки при условии постоянного напряжения генератора. Машины с независимым возбуждением Обмотка возбуждения таких машин питается от отдельного источника напряжения (рис. 3.4).
Машины с параллельным возбуждением
Обмотка возбуждения и обмотка якоря таких машин включаются параллельно (рис. 3.5). ДПТ с независимым и параллельным возбуждением имеют слабую зависимость скорости от момента на валу. Такие характеристики называются жесткими (рис. 3.6). С ростом момента на валу ДПТ напряжение на якоре немного снижается вследствие роста тока и влияния активного сопротивления цепи якоря. Это уменьшает ток возбуждения и основное магнитное поле двигателя с параллельным возбуждением. Поэтому он вращается чуть быстрее, чем такой же двигатель с независимым возбуждением и той же нагрузкой. (Подробнее о влиянии основного поля на скорость ДПТ сказано далее.) С ростом тока нагрузки напряжение ГПТ с параллельным возбуждением уменьшается вследствие влияния внутреннего сопротивления цепи якоря и размагничивающего действия якоря, что приводит с снижению тока возбуждения генератора и к дополнительному уменьшению его напряжения. Поэтому напряжение ГПТ с параллельным возбуждением сильнее зависит от тока, чем у ГПТ с независимым возбуждением. Машины с последовательным возбуждением
Обмотка возбуждения и обмотка якоря таких машин включаются последовательно (рис. 3.8). ДПТ с последовательным возбуждением имеют "мягкие" характеристики, то есть их скорость сильно зависит от момента на валу (рис. 3.9). Такая зависимость автоматически подстраивает скорость под нагрузку, обеспечивая постоянную мощность двигателя. Эти двигатели отличаются хорошими пусковыми характеристиками и большой перегрузочной способностью. Они применяются, например, для привода электротранспорта и подъемных механизмов. ДПТ с последовательным возбуждением не имеют скорости холостого хода. Их нельзя включать без нагрузки, т.к. при этом они разгоняются до тех пор, пока не происходит механическая авария.
Ток нагрузки ГПТ с последовательным возбуждением является одновременно его током возбуждения. Поэтому на холостом ходу основное магнитное поле обусловлено только намагниченностью статора и генератор дает небольшое напряжение. При больших токах нагрузки напряжение падает из-за влияния сопротивления цепи якоря и размагничивающего действия якоря. ГПТ с последовательным возбуждением применяются в специальных случаях. Машины со смешанным возбуждением Они имеют две обмотки возбуждения - параллельную и последовательную (рис. 3.11). Характеристики таких машин могут различаться в зависимости от доли магнитного поля, создаваемого каждой из обмоток возбуждения. ГПТ со смешанным возбуждением обычно делают так, чтобы напряжение мало зависело от тока нагрузки (рис. 3.13).
Схема замещения МПТ МПТ представляется схемой замещения, изображенной на рис. 3.14. Здесь u – напряжение на якоре, R – сопротивление цепи якоря, i – ток якоря, e – ЭДС якоря (ЭДС вращения). Такая структура схемы следует из того, что напряжение на якоре складывается всего из двух составляющих, одна из которых определяется законом Ома, а вторая – законом электромагнитной индукции:
При i > 0 (u > e) машина находится в режиме двигателя, при i = 0 (u = e) – в режиме идеального холостого хода, при i < 0 (u < e) – в режиме генератора. Основные уравнения МПТ По закону электромагнитной индукции ЭДС вращения e пропорциональна частоте вращения якоря n и основному магнитному потоку машины Ф:
где ke - коэффициент, зависящий от конструкции машины. Подставив (3.2) в (3.1), получим выражение для частоты вращения машины:
По закону Ампера момент машины М пропорционален току якоря и основному магнитному потоку:
где kM - коэффициент, зависящий от конструкции машины. Основной магнитный поток Ф пропорционален току возбуждения (у МПТ со смешанным возбуждением - полному току возбуждения). Пуск и реверс ДПТ При разгоне двигателя вследствие малой скорости ЭДС вращения мала по сравнению с тем значением, которое она имеет в номинальном режиме. Поэтому напряжение источника питания при пуске уравновешивается в основном сопротивлением и током цепи якоря (3.1, 3.2). Сопротивление самого якоря очень мало, и при непосредственном включении ДПТ ток якоря будет в десятки раз больше номинального. Это может привести к перегрузке электрической цепи якоря и к механической аварии вследствие увеличения момента на валу двигателя. Для ограничения пускового тока последовательно с якорем включают дополнительные резисторы, которые по мере разгона выводят из цепи. Если двигатель питается от регулятора напряжения, то этот же регулятор используется для пуска. Чтобы реверсировать ДПТ, нужно изменить направление тока якоря или основного магнитного поля двигателя. Для этого надо поменять полярность включения якоря или обмоток возбуждения. Пуск ГПТ При пуске ГПТ с параллельным или смешанным возбуждением сопротивление нагрузки не должно быть меньше некоторого критического значения, иначе обмотка возбуждения не получит достаточно тока для создания нормального магнитного поля. Если сопротивление нагрузки меньше критического, то нужно сначала включить генератор и подождать, когда ток возбуждения и напряжение якоря достигнут номинальных значений, а затем подключать нагрузку. Синхронные машины Общая характеристика Синхронные машины (СМ) - это машины переменного тока. Они могут работать как двигатели или генераторы в зависимости от момента на валу. Они имеют следующие основные особенности: 1) Их частота вращения постоянна и равна частоте вращения магнитного поля асинхронных двигателей (см. п. 2):
где f – частота напряжения сети, к которой подключена СМ, р – число пар полюсов СМ, 60 - число секунд в минуте. Исключение составляют синхронные генераторы (СГ), работающие автономно, без параллельного подключения к другим источникам переменного напряжения (например, генераторы, питающие бортовые сети автомобилей). Частота вращения таких СГ определяется частотой вращения первичных двигателей, но она также связана с частотой напряжения формулой (4.1). 2) Сдвиг фаз между напряжением и током СМ можно регулировать
|
|||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 402; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.140.188.195 (0.019 с.) |

 , где m - число.
, где m - число. Рис. 1.1. Двухобмоточный трансформатор.
Рис. 1.1. Двухобмоточный трансформатор.
 , (1‑1)
, (1‑1) .
. . (1‑2)
. (1‑2) Тл),
Тл),  ,
,  , то
, то  . Так как длина средней линии сердечника ограничена, то
. Так как длина средней линии сердечника ограничена, то  , поэтому из уравнения (1-2) получаем уравнение токов идеального трансформатора: токи обмоток обратно пропорциональны числу витков:
, поэтому из уравнения (1-2) получаем уравнение токов идеального трансформатора: токи обмоток обратно пропорциональны числу витков: .
. , то есть идеальный трансформатор мгновенную мощность источника полностью передает нагрузке.
, то есть идеальный трансформатор мгновенную мощность источника полностью передает нагрузке. называется коэффициентом трансформации.
называется коэффициентом трансформации. .
. Рис. 1.2.
Рис. 1.2.
 , которое называется вносимым сопротивлением (например, рис.1.2). Поэтому трансформаторы часто применяют для согласования сопротивления нагрузки Z с источником энергии, рассчитанным на подключение нагрузки
, которое называется вносимым сопротивлением (например, рис.1.2). Поэтому трансформаторы часто применяют для согласования сопротивления нагрузки Z с источником энергии, рассчитанным на подключение нагрузки  и
и  . Они определяют состояние цепи при коротком замыкании нагрузки, поэтому называются сопротивлениями короткого замыкания.
. Они определяют состояние цепи при коротком замыкании нагрузки, поэтому называются сопротивлениями короткого замыкания. Рис. 1.3.
Рис. 1.3.
 и ток
и ток  называются приведенными и отмечаются штрихами. Напряжение
называются приведенными и отмечаются штрихами. Напряжение  называется падением напряжения. Разность действующих значений напряжений
называется падением напряжения. Разность действующих значений напряжений  называется потерей напряжения. Ее значение используется для расчета напряжения нагрузки по заданному току. Обычно потеря напряжения составляет несколько процентов от номинального напряжения первичной обмотки.
называется потерей напряжения. Ее значение используется для расчета напряжения нагрузки по заданному току. Обычно потеря напряжения составляет несколько процентов от номинального напряжения первичной обмотки. и
и  проводится опыт короткого замыкания (рис. 1.4). Сопротивление нагрузки заменяется перемычкой, а напряжение источника устанавливается таким, чтобы токи трансформатора были номинальными. Это напряжение называется напряжением короткого замыкания и обозначается UК.
проводится опыт короткого замыкания (рис. 1.4). Сопротивление нагрузки заменяется перемычкой, а напряжение источника устанавливается таким, чтобы токи трансформатора были номинальными. Это напряжение называется напряжением короткого замыкания и обозначается UК. Рис. 1.4.
Рис. 1.4.
 , где
, где  – номинальное напряжение первичной обмотки. В паспорте указывают также номинальные напряжения
– номинальное напряжение первичной обмотки. В паспорте указывают также номинальные напряжения  , мощность потерь энергии в опыте короткого замыкания PК и номинальную полную мощность SН. Номинальные токи
, мощность потерь энергии в опыте короткого замыкания PК и номинальную полную мощность SН. Номинальные токи  и
и  рассчитываются по паспортным данным.
рассчитываются по паспортным данным. ,
,  ,
, ,
,  для любого двухполюсника. Здесь
для любого двухполюсника. Здесь  – полное сопротивление короткого замыкания.
– полное сопротивление короткого замыкания. Рис. 1.5.
Рис. 1.5.
 – напряжение холостого хода вторичной обмотки.
– напряжение холостого хода вторичной обмотки. – коэффициент загрузки трансформатора,
– коэффициент загрузки трансформатора, – относительное значение активной составляющей напряжения короткого замыкания (рис. 1.4),
– относительное значение активной составляющей напряжения короткого замыкания (рис. 1.4), – относительное значение реактивной составляющей напряжения короткого замыкания (рис. 1.4),
– относительное значение реактивной составляющей напряжения короткого замыкания (рис. 1.4), – разность фаз напряжения и тока нагрузки.
– разность фаз напряжения и тока нагрузки. , (1‑3)
, (1‑3) определяется так:
определяется так: . (1‑4)
. (1‑4) . (1‑5)
. (1‑5) Рис. 1.6.
Рис. 1.6.
 удобно принять равной нулю:
удобно принять равной нулю:  . Если разность фаз напряжения и тока нагрузки
. Если разность фаз напряжения и тока нагрузки  , то начальная фаза тока нагрузки
, то начальная фаза тока нагрузки  .
. совпадает с фазой тока, фаза напряжения на катушке индуктивности
совпадает с фазой тока, фаза напряжения на катушке индуктивности  больше фазы тока на
больше фазы тока на  . Сумма этих напряжений равна падению напряжения:
. Сумма этих напряжений равна падению напряжения: . (1‑6)
. (1‑6) . (См. также рис. 1.3) (1‑7)
. (См. также рис. 1.3) (1‑7) , (1‑9)
, (1‑9) вследствие малости
вследствие малости  по сравнению с
по сравнению с  .
. , т.к.
, т.к.  . (1‑10)
. (1‑10) .
.

 .
. получим:
получим: ,
, – приведенное напряжение холостого хода вторичной обмотки, оно равно напряжению
– приведенное напряжение холостого хода вторичной обмотки, оно равно напряжению  равно относительному изменению настоящего вторичного напряжения
равно относительному изменению настоящего вторичного напряжения  , поэтому
, поэтому . (1‑11)
. (1‑11) , то из формулы (1-11) получим выражение (1-3). Используя соотношения
, то из формулы (1-11) получим выражение (1-3). Используя соотношения  ,
,  ,
,  ,
,  , формулу (1-5) можно привести к виду (1-4).
, формулу (1-5) можно привести к виду (1-4). Рис. 1.7.
Рис. 1.7.
 моделирует активное сопротивление, обусловленное потерями энергии в сердечнике трансформатора. Индуктивное сопротивление
моделирует активное сопротивление, обусловленное потерями энергии в сердечнике трансформатора. Индуктивное сопротивление  обусловлено магнитным потоком в сердечнике.
обусловлено магнитным потоком в сердечнике. обозначает активное сопротивление первичной обмотки. Индуктивное сопротивление первичной обмотки
обозначает активное сопротивление первичной обмотки. Индуктивное сопротивление первичной обмотки  обусловлено ее магнитным потоком рассеивания. Приведенные сопротивления
обусловлено ее магнитным потоком рассеивания. Приведенные сопротивления  и
и  моделируют соответствующие параметры вторичной обмотки. Обычно трансформаторы конструируют так, что
моделируют соответствующие параметры вторичной обмотки. Обычно трансформаторы конструируют так, что  ,
,  .
. Рис. 1.8.
Рис. 1.8.
 и мощность
и мощность  первичной обмотки. Сопротивления намагничивающей ветви намного больше сопротивлений первичной обмотки, поэтому последними пренебрегают, и значения
первичной обмотки. Сопротивления намагничивающей ветви намного больше сопротивлений первичной обмотки, поэтому последними пренебрегают, и значения  ,
,  , где
, где  .
.
 .
. .
. .
. . Согласно уравнениям (1-1), магнитный поток
. Согласно уравнениям (1-1), магнитный поток  определяется напряжениями трансформатора. Поскольку напряжения мало зависят от нагрузки, мощность потерь в сердечнике при номинальных напряжениях принимается постоянной и равной мощности потерь холостого хода
определяется напряжениями трансформатора. Поскольку напряжения мало зависят от нагрузки, мощность потерь в сердечнике при номинальных напряжениях принимается постоянной и равной мощности потерь холостого хода  .
. Рис. 1.9.
Рис. 1.9.
 («в меди»), как и в любом резисторе, пропорциональны квадрату токов:
(«в меди»), как и в любом резисторе, пропорциональны квадрату токов:  .
. (рис. 1.9).
(рис. 1.9). Рис. 1.10.
Рис. 1.10.
 Рис. 1.11.
Рис. 1.11.
 (рис. 1.11). Такое условие согласуется с симметрией напряжений трехфазной цепи, вследствие которой эта сумма потоков также равна нулю.
(рис. 1.11). Такое условие согласуется с симметрией напряжений трехфазной цепи, вследствие которой эта сумма потоков также равна нулю. ,
,  , рис. 2.11). Энергия торможения через магнитное поле и обмотки статора отдается в сеть, где она может быть истрачена с пользой.
, рис. 2.11). Энергия торможения через магнитное поле и обмотки статора отдается в сеть, где она может быть истрачена с пользой.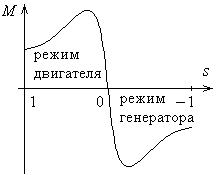 Рис. 2.11. Механическая характеристика АД с короткозамкнутым ротором для положительных и отрицательных значений скольжения.
Рис. 2.11. Механическая характеристика АД с короткозамкнутым ротором для положительных и отрицательных значений скольжения.
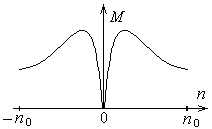 Рис. 2.12. Тормозной момент АД с короткозамкнутым ротором в зависимости от частоты вращения ротора в режиме динамического торможения.
Рис. 2.12. Тормозной момент АД с короткозамкнутым ротором в зависимости от частоты вращения ротора в режиме динамического торможения.
 Рис. 3.1. Схематический поперечный разрез МПТ с двумя парами полюсов.
Рис. 3.1. Схематический поперечный разрез МПТ с двумя парами полюсов.
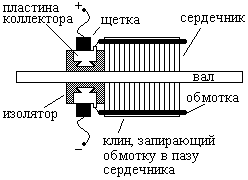 Рис. 3.2. Продольный разрез якоря.
Рис. 3.2. Продольный разрез якоря.
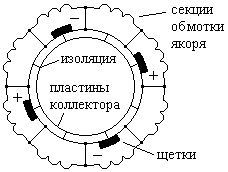 Рис. 3.3. Схема соединения обмоток якоря с пластинами коллектора и щетками. Знаками "+" и "–" отмечено подключение щеток к источнику питания. Для простоты показано небольшое количество секций обмотки.
Рис. 3.3. Схема соединения обмоток якоря с пластинами коллектора и щетками. Знаками "+" и "–" отмечено подключение щеток к источнику питания. Для простоты показано небольшое количество секций обмотки.
 Рис. 3.4. Схема подключения обмоток
МПТ с независимым возбуждением.
Рис. 3.4. Схема подключения обмоток
МПТ с независимым возбуждением.
 Рис. 3.5. Схема подключения обмоток
машины с параллельным возбуждением.
Рис. 3.5. Схема подключения обмоток
машины с параллельным возбуждением.
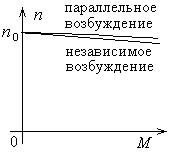 Рис. 3.6. Механические
характеристики ДПТ
с независимым и с
параллельным возбуждением.
Рис. 3.6. Механические
характеристики ДПТ
с независимым и с
параллельным возбуждением.
 Рис 3.7. Внешние
характеристики ГПТ
с независимым и
с параллельным
возбуждением.
Рис 3.7. Внешние
характеристики ГПТ
с независимым и
с параллельным
возбуждением.
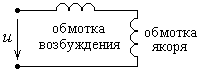 Рис. 3.8. Схема подключения
обмоток МПТ с последо-
вательным возбуждением.
Рис. 3.8. Схема подключения
обмоток МПТ с последо-
вательным возбуждением.
 Рис. 3.9. Механическая
характеристика ДПТ
с последовательным
возбуждением.
Рис. 3.9. Механическая
характеристика ДПТ
с последовательным
возбуждением.
 Рис. 3.10. Внешняя ха-
рактеристика ГПТ с
последовательным
возбуждением.
Рис. 3.10. Внешняя ха-
рактеристика ГПТ с
последовательным
возбуждением.
 Рис. 3.11. Схема подключения
обмоток машины со смешанным возбуждением.
Рис. 3.11. Схема подключения
обмоток машины со смешанным возбуждением.
 Рис. 3.12. Механическая характеристика ДПТ
смешанного возбуждения.
Рис. 3.12. Механическая характеристика ДПТ
смешанного возбуждения.
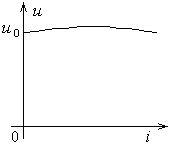 Рис. 3.13. Внешняя
характеристика ГПТ
смешанного возбуждения.
Рис. 3.13. Внешняя
характеристика ГПТ
смешанного возбуждения.
 . (3.1)
. (3.1) , (3.2)
, (3.2) . (3.3)
. (3.3) , (3.4)
, (3.4) (об/мин), (4.1)
(об/мин), (4.1)


