Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Загальна теорія мостових схемСодержание книги
Поиск на нашем сайте
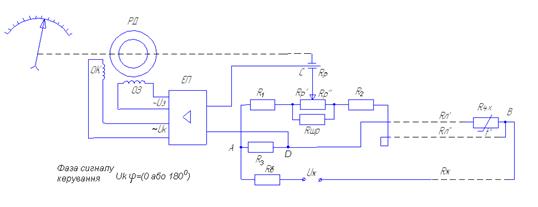
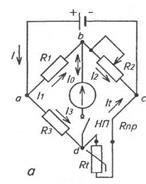
Всі первинні вимірювальні перетворювачі (ПВП), які використовуються для вимірювання загально-технічних параметрів (температура, тиск, витрати, рівень тощо) технологічних процесів, можна умовно розділити на дві групи: - активні (генераторні), які перетворюють вимірюваний параметр у напругу, електрорушійну силу, або струм, та - пасивні (параметричні), які перетворюють параметр в опір, індуктивність та ємність. Найбільш універсальним для вимірювання сигналів ПВП в обох випадках є: - використовування зрівноважених та незрівноважених мостових схем для перетворення вимірювальної інформації пасивних ПВП (принцип роботи грунтується на вимірюванні зміни опору ПВП методом зрівноваженого або незрівноваженого моста); т а На рис. 1,а приведена схема одинарного чотириплечного лабораторного
Рис. 1. Вимірювальна схема одинарного моста Уітстона.
зрівноваженого моста Уітстона, який працює у комплекті з термометром опо- ру (ТО). Мостова схема – це чотири з’єднаних між собою опори R R До інших термінів мостової схеми відносяться: вершини моста ( Розрізняють мости постійного та змінного струмів. До мостів постійного струму відносяться схеми мостів, в плечах яких знаходяться тільки активні опори і які живляться напругою постійного струму. До них умовно відносять і мости, які живляться змінним струмом, але при умові наявності тільки активних опорів у їхніх плечах. До мостів змінного струму відносяться схеми мостів, в плечах яких знаходяться реактивні опори і які живляться напругою змінного струму. У зрівноважених лабораторних та автоматичних мостах напруга у вимірювальній діагоналі повинна дорівнювати нулю у момент видачі інформації про значення невідомого опору, тобто, Виведемо залежність напруги у вимірювальній діагоналі (рис. 1,а) від значень напруги живлення
Після перетворення (їх виконати студенту самостійно!!!) залежності (1), отримуємо:
Умова рівноваги моста, тобто,
Рівняння (3) можемо записати у вигляді основного рівняння зрівноважування:
Для виконування зрівноважування в якості опору При умові моста Якщо реохорд ввімкнений в одне плече моста(рис. 1,а,б), то таку схему зрівноважування називають схемою порівняння. В більшості випадків рівновагу автоматичних мостів забезпечують зміною відношення двох суміжних плечей, між яким установлюють реохорд (рис. 2.) Реохорд з опором
В лабораторних мостах (рис. 1,а,б) зрівноважування виконують, переміщуючи повзунок реохорда вручну, а в автоматичних (рис. 2) – таке переміщення здійснюється за рахунок використовування реверсивного двигуна (РД) та спеціальної кінематичної схеми. В автоматичних мостах використовується також спеціальний електронний підсилювач ЕП, який здійснює вимірювання напруги По способу під'єднання термометрів опору (ТО) до мостів розрізняють схеми в два та в три проводи. За схемою в два проводи (рис. 1,а) ТО з’єднується з мостом двома
Рис. 2. Схема автоматичного моста для вимірювання температури у разі під'єднання ТО
проводами з опором вимірювань буде впливати як довжина цих проводів, так і температура середовища, в якому вони проходять. Умова рівноваги моста в цьому випадку відповідає залежності: Для забезпечення градуювання ТО за такою схемою (рис.1,а), необхідно щоб незалежно від довжини дротів з’єднання (опорів Але така схема не компенсує додаткову похибку від впливу зміни температури середовища (вона має значення 20 Тому для виключення впливу зміни температури та довжини проводів з’єднання на результати вимірювання, застосовують схему з’єднання ТО з мостовою схемою в три дроти. Для цього в схему вводять третій дріт, яким одну із клем живлення безпосередньо під'єднують до головки ТО (рис. 1,б та рис. 3). Таким чином, одна із точок вимірювальної діагоналі (точка В на рис. 3), знаходиться на одній із клем головки ТО. Суть такої схеми з’єднання в тому, що дроти лінії з’єднання з опорами
Якщо розрити дужки цієї залежності (виконати самостійно!!!), то видно, що за умови рівності Спрощена схема автоматичного моста для вимірювання температури за тридротовою схемою ввімкнення первинного вимірювального перетворювача
Рис.3. Схема автоматичного моста для вимірювання температури у разі під'єднання ТО
|
||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 1383; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.12.151.11 (0.01 с.) |

 в)
в) 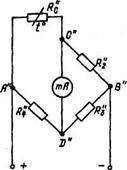
 , R
, R  , R
, R  та
та , що утворюють квадрат. Суть роботи такої схеми полягає в тому, що вона дозволяє визначити один невідомий опір R
, що утворюють квадрат. Суть роботи такої схеми полягає в тому, що вона дозволяє визначити один невідомий опір R  ), верхня (
), верхня ( ) та нижня (
) та нижня ( ) вітки моста та діагоналі живлення і вимірювальна з відповідними напругами
) вітки моста та діагоналі живлення і вимірювальна з відповідними напругами  та
та  .
. =
=  у верхній вітці моста, а
у верхній вітці моста, а  =
=  - у нижній, і можемо визначити напругу у вимірювальній діагоналі як різницю потенціалів між точками
- у нижній, і можемо визначити напругу у вимірювальній діагоналі як різницю потенціалів між точками  та
та  , яка в свою чергу залежить від спадів напруг на резисторах
, яка в свою чергу залежить від спадів напруг на резисторах  та
та  :
: -
-  =
=  . (1)
. (1) . (2)
. (2) 
 =
=  . (3)
. (3) =
=  . (4)
. (4) та досягненні, за рахунок зміни опору
та досягненні, за рахунок зміни опору  установлений між опорами
установлений між опорами  вимірювальної діагоналі з напругою
вимірювальної діагоналі з напругою  для даної схеми, є потенціал на повзунку реохорда.
для даної схеми, є потенціал на повзунку реохорда. в залежності від знаку відхилення
в залежності від знаку відхилення  від нуля. ЕП генерує також напругу в обмотку (ОЗ) збудження РД, підготовлюючи його до обертання. Обмотки ОЗ та ОК зсунуті в просторі на 90
від нуля. ЕП генерує також напругу в обмотку (ОЗ) збудження РД, підготовлюючи його до обертання. Обмотки ОЗ та ОК зсунуті в просторі на 90  виводить міст із рівноваги і на керуючій обмотці ОК з’являється напруга з зсувом фази 0 або 180
виводить міст із рівноваги і на керуючій обмотці ОК з’являється напруга з зсувом фази 0 або 180 
 (з одного та другого кінців
(з одного та другого кінців  =
=  , у ланцюг кола вводять зрівняльні котушки з опорами
, у ланцюг кола вводять зрівняльні котушки з опорами 
 2,5 Ом. Мости градуюють за такою схемою на номінальний сумарний опір дротів під'єднання, який дорівнює:
2,5 Ом. Мости градуюють за такою схемою на номінальний сумарний опір дротів під'єднання, який дорівнює:  = 2(
= 2( +
+  ) = 5 Ом.
) = 5 Ом. +
+  .
. (яку в таких схемах забезпечують) та рівності опорів дротів з’єднання
(яку в таких схемах забезпечують) та рівності опорів дротів з’єднання