Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Управление технологическими процессамиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Управление технологическими процессами
Курс лекций
Разработчик Афонин Ю.Д.
Екатеринбург, 2007 Содержание
Введение............................................................................................................ 4 1 Понятие об автоматическом регулировании................................................ 6 1.1 Принцип регулирования по возмущению............................................... 7 1.2 Принцип регулирования по отклонению (по ошибке)........................... 9 1.3 Понятие о законах регулирования........................................................ 13 1.4 Понятие об автоматизированном технологическом объекте............... 18 2 Архитектура ЭВМ....................................................................................... 21 2.1 Понятие архитектуры ЭВМ. Представление информации в ЭВМ...... 21 2.2 Структура памяти. Структура магистрали........................................... 23 IBM PC – AT................................................................................................. 23 2.3 Устройства ввода – вывода.................................................................... 29 3. Обмен информацией с внешними устройствами....................................... 31 3.1 Способы обмена информацией с внешними устройствами.................. 31 3.2 Магистраль ISA IBM PC совместимого компьютера........................... 34 3.3 Циклы ВВОД и ВЫВОД магистрали ISA............................................. 37 3.4 Цикл по прерыванию программы......................................................... 39 3.5 Магистраль PCI IBM PC совместимого компьютера........................... 42 3.6 Магистраль PCI Express........................................................................ 46 4 Промышленные компьютеры...................................................................... 49 4.1 Понятие о промышленных компьютерах серии Micro PC................... 49 4.2 Процессорная плата 5025А................................................................... 52 4.3 Плата АЦП 5710.................................................................................... 58 5 Стандартные интерфейсы обмена данными............................................... 62 5.1 Интерфейс RS-232. Программирование интерфейса RS-232.............. 62 5.2 Интерфейс RS-485.................................................................................. 68 5.3 БИС программируемого параллельного интерфейса КР580ВВ55А (82С55А) 73 5.4 Интерфейс КОП...................................................................................... 75 6 Системы программного обеспечения операторских станций АСУ ТП (SCADA) 84 6.1 Понятие о системах SCADA.................................................................. 84 6.2 Пакет Genie............................................................................................. 86 6.3 Технология OPC..................................................................................... 91 Литература................................................................................................... 96
Введение Наиболее яркой чертой научно-технического прогресса наших дней стало повсеместное внедрение компьютеров и компьютерной технологии в различные отрасли человеческой деятельности. Все, начиная со школьника и кончая инженером и научным сотрудником, в учебе и производственной деятельности используют или в ближайшее время будут использовать ЭВМ. При этом среди множества областей применения ЭВМ распределенное технологическое управление — наиболее массовые потребители относительно недорогих и компактных мини- и микро-компьютеров, которые используются, в основном, для автоматизации технологических объектов и связанных с ними технических расчетов. Под автоматизацией технологического объекта мы будем понимать круг проблем, связанных с использованием средств вычислительной техники для регистрации технологической информации и управления узлами этого объекта. Из сказанного следует, что наличие компьютера является необходимым условием автоматизированного технологического управления. Необходимым, но далеко не достаточным. Приобретя компьютер с набором периферийных устройств (накопители на магнитных дисках, принтер, графопостроитель и др.) и создав технологическую установку, вы должны в первую очередь соединить их между собой, чтобы сигналы с датчиков поступали в компьютер и сигналы, вырабатываемые компьютером, управляли процессом. Но именно здесь и кроется первая трудность: сигналы с датчиков имеют различную физическую природу (напряжение или ток, импульсные или квазинепрерывные и т.д.), а компьютер понимает только язык двоичных цифр, причем переданных ему строго определенным образом. Эта проблема решается применением аппаратуры сопряжения или интерфейсов связи компьютера с устройствами ввода/вывода. Интерфейсы переводят сигналы различного типа на язык стандартных сигналов, воспринимаемых ЭВМ. После решения проблемы сопряжения компьютера с объектом управления встанет проблема разработки программ обслуживания технологического процесса, представления информации в графической форме на мониторе оператора, создания файлов архива, аварий и др. Автоматизированный технологический объект кроме всего прочего требует знания соответствующего химического технологического процесса, реализуемого с помощью данного объекта, для эффективного и корректного использования преимуществ автоматизации. Мы перечислили далеко не все проблемы, но уже видно, что для эффективного применения компьютеров в управлении требуются разнообразные знания и высокая квалификация в области вычислительной техники. Пользователи же систем автоматизации, например инженеры - технологи, как правило, не являются специалистами в этих областях. Для таких студентов и предназначен этот курс лекций. В нем даются представления о системах автоматизированного регулирования, законах автоматизированного управления, архитектуре и магистралях ЭВМ, промышленных компьютерах, системах наиболее распространенных интерфейсов, системах SCADA и технологии ОРС. Компетенциями этого курса является то, что после освоения лекционного материала и приобретения практических навыков при выполнении лабораторных работ, студент способен самостоятельно разработать систему автоматизированного управления тем или иным технологическим объектом.
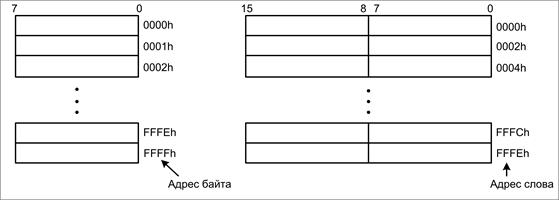
Архитектура ЭВМ IBM PC – AT Как мы уже говорили память предназначена для хранения программ и данных. В микро-ЭВМ используются несколько видов памяти, которые подразделяются на внутреннюю и внешнюю. Наиболее важную, для понимания работы микро-ЭВМ, роль играет внутренняя оперативная память, организацию которой мы и рассмотрим. Оперативная память представляет собой электронное устройство, включающее в себя большое количество запоминающих элементов для записи бит информации, а также схемы управления ими. Элементы группируются в байты и слова. У каждого слова и каждого байта есть адрес – номер, по которому к ним обращается центральный процессор. Все байты оперативной памяти нумеруются, начиная с нуля. Слова нумеруются четными числами, причем четные байты считаются младшими в слове и занимают разряды 0÷7 слова, нечетные байты слова занимают старшие разряды 8÷15.
В микро-ЭВМ предусмотрена возможность обращения, как к словам, так и к байтам. Разрядность адреса памяти определяет максимальную область памяти или адресное пространство памяти, доступное для процессора. Так, 16 – разрядный адрес позволяет обращаться к 64Кбайтам (1Кб=210=1024 байт, 1Мб=220=1024Кб) или к 32Ксловам, 32 разрядный к 4Гбайтам (232) или к 1Гслову (для 32 разрядных слов). Структура стандартной памяти ОЗУ размером в 1Мб IBM PC совместимого компьютера класса PC-AT286 представлена на рис. 2.1. Ряд адресов памяти закреплен для специальных целей. Адреса памяти с 00000 по 00400H (H - обозначение шестнадцатеричной системы счисления) зарезервированы под векторы прерываний и использовать их для других целей нельзя. Программы и данные располагаются в ячейках памяти с адресами 00400H÷9FFFFH.
Рисунок 2.1 – Структура стандартной памяти ОЗУ IBM PC-AT286. В IBM – совместимых ПК, для обеспечения совместимости с предыдущими моделями, адреса задаются совокупностью двух шестнадцатеричных слов, которые называются сегментом и смещением. Сегмент – это участок памяти, имеющий длину 64Кб и начинающийся с физического адреса, кратного 16 (т.е. 0, 16, 32, 48 и т.д.). Смещение указывает сколько байт от начала сегмента необходимо пропустить, чтобы обратиться к нужному адресу. Для адресации в пределах 1Мб необходимо 20 двоичных разрядов, которые получаются из сегмента и смещения следующим образом: содержимое сегмента смещается влево на 4 разряда, освободившиеся правые разряды заполняются нулями, результат складывается с содержимым смещения (рис 2.2). Поэтому абсолютный адрес состоит из двух частей сегмента и смещения разделенных двоеточием 8000:10F0.
Рисунок 2.2 – Образование двадцатиразрядного адреса. В микро – ЭВМ используется оперативная память различных типов. Память, сохраняющая свое содержимое при выключении питания, называется энергонезависимой, в противном случае она энергозависима. Наиболее распространена энергонезависимая память, выполненная на флеш – микросхемах, а энергозависимая на МОП БИС. В настоящее время в качестве оперативной памяти микро – ЭВМ чаще всего используются динамические запоминающиеся устройства на МОП – структурах. Динамическим ЗУ присущ существенный недостаток: для сохранения содержимого необходимо периодически считывать и записывать элементы памяти, этот процесс называется регенерацией памяти. Типичный период регенерации составляет 2 мс. В зависимости от конкретного исполнения ЗУ доступ к нему может блокироваться на время регенерации или быть «прозрачным» для центрального процессора. При работе ЭВМ в линию с экспериментом это необходимо учитывать. Тем не менее три достоинства: высокая степень интеграции, малое потребление энергии, малая удельная стоимость бита информации, определяют широкое применение динамических ЗУ в ЭВМ. Динамические ЗУ позволяют записывать и считывать данные по любому адресу в произвольный момент времени. Постоянные запоминающие устройства (ПЗУ) допускают только считывание содержимого ячеек памяти по любому адресу. Запись данных в ПЗУ производится с помощью специального оборудования – программатора. Существуют три основных типа ПЗУ, которые различаются по способу записи их содержимого. В ПЗУ первого типа (масочные ПЗУ) данные записываются один раз, при производстве соответствующей БИС. Содержимое ПЗУ второго типа (программируемые ПЗУ или ППЗУ) при наличии специального оборудования может задавать пользователь. Обычно ППЗУ реализуются с помощью диодных матриц, расположенных в корпусе БИС. Используя внешние контакты, выбранные диоды можно выжечь, записав тем самым в ячейки необходимую информацию. После программирования содержимое таких ПЗУ изменить нельзя. ПЗУ третьего типа при наличии соответствующего оборудования пользователь может программировать и репрограммировать много раз (РПЗУ). ПЗУ первого типа обычно используются в управляющей памяти Ц.П. ППЗУ и РПЗУ могут использоваться для записи программ обслуживания технологических процессов или обработки его результатов при условии, что программы неизменны. Центральный процессор (ЦП), память и устройства ввода-вывода (УВВ) связаны между собой магистралью, представляющей набор проводников, по которым передается различная информация. В некоторых микро-ЭВМ используются две магистрали, одна – для связи центрального процессора с памятью, а другая - для связи с УВВ. Линии магистрали подразделяются на три группы: линии данных, адреса и управления. В некоторых микро – ЭВМ линии адреса и данных физически совмещены и попеременно используются для передачи адресов и данных, например магистраль PCI в компьютерах IBM PC. На рис. 2.3 приведена схема магистрали компьютера класса IBM PC-AT, а на рис 2.4 более сложная организация компьютера класса Pentium.
Рисунок 2.3-Схема магистрали компьютера класса IBM PC-AT Линии данных используются для передачи информации между отдельными частями микро – ЭВМ. При взаимодействии, например ЦП с памятью этой информацией являются команды или данные, которые либо считываются из соответствующих ячеек памяти, либо записываются в них, а при взаимодействии с УВВ – данные, состояние УВВ, приказы или информация о прерывании. Число линий данных в магистрали определяет число передаваемых одновременно бит и обычно совпадает с длинной слова, выраженной в битах. Как правило, линии данных являются двунаправленными, т.е. передача данных по ним возможна в двух направлениях. Направление передачи определяется специальными сигналами, передаваемыми по линиям управления; в конкретный момент времени может производится передача только в одном направлении. Линии адреса предназначены для передачи комбинаций бит, с помощью которых происходит обращение к ячейке памяти, каждая из которых имеет свой адрес. Число бит, используемых для задания адреса, определяет множество
Рисунок 2.4 – Магистральная организация компьютера класса Pentium. возможных адресов, которое образует адресное пространство машины. Так, 16 линий адреса позволяют адресоваться к 32 Кслов (64 Кб) памяти, при этом формируемый ЦП 16-разрядный адрес непосредственно поступает на линии адреса магистрали. Увеличение числа адресных линий до 24 позволяет расширить адресное пространство до 16 Мб, 32 линии до 4Гб. На магистрали применяется синхронный способ передачи адреса и данных, который вводится с помощью сигналов управления. Сигналы управления передаются по линиям управления. Хотя в разных микро-ЭВМ линии управления функционально различаются, информация, передаваемая по ним, представляет собой совокупность определенных сигналов: · запросы на использование магистрали, которые формируются различными устройствами, подключенными к магистрали; · разрешение использования магистрали, которое формируется в соответствии с назначенными приоритетами в схемах приоритетов (эти схемы могут находиться в центральном процессоре или реализуются на отдельных БИС); · сигналы прерываний, фиксирующие внешние события, требующие внимания ЦП и разрешающие их в соответствии с приоритетами; · сигналы синхронизации для координации передач по линиям адресов и данных; · сигналы о неисправностях или выключении питания. Устройства ввода – вывода Микро-ЭВМ связана с устройствами ввода-вывода, которые подключаются к магистрали. УВВ, называемые также периферийными или внешними устройствами, подразделяются на стандартные и нестандартные. К стандартным принято относить устройства, используемые при взаимодействии оператора с ЭВМ, а также при организации вычислительного процесса: видеотерминалы, накопители на гибких и жестких магнитных дисках, магнитных лентах, принтеры, видеоадаптеры и т.д. К нестандартной периферии мы будем относить УВВ, обеспечивающие связь микро-ЭВМ с технологическим объектом: аналогово-цифровые и цифро-аналоговые преобразователи, модули управления шаговыми двигателями, различные счетчики, аппаратура в стандарте КАМАК, КОП и т.д.. В каждом УВВ, подключаемом к магистрали ЭВМ в общем случае можно выделить две части: функциональную и контроллер (рис. 2.5).
Рисунок 2.5 – Устройство ввода/вывода. Функциональная часть реализует принцип работы данного УВВ. Контроллер управляет работой функциональной части по командам ЦП и выполняет некоторую комбинацию следующих функций: · передача состояния УВВ в ЭВМ; · обеспечение приема и буферного хранения данных, вводимых и выводимых из ЭВМ в УВВ; · передача команд от ЭВМ в УВВ; · сигнализация ЭВМ о завершении операции и об ошибке, возникшей во время операции; · сигнализация ЭВМ о необходимости обмена и о способе обмена. Для организации обмена с ЭВМ контроллер содержит один или несколько регистров, предназначенных для хранения информации, принятой с магистрали по линиям данных или которую необходимо выставить на линии данных. Процессор работает с регистрами УВВ так же, как с ячейками памяти. Среди регистров УВВ выделяют следующие: · регистр управления и состояния CSR (Control and Status Register) содержит информацию об операции, выполняемой УВВ, характеризует состояние УВВ и участвует в операциях по предоставлению прерывания; · регистр данных DSR (Data Storage Registor) испопьзуется при обмене данными между ЦП и УВВ. Определенные разряды CSR иногда.называют флагами, говоря, что флаг установлен, если в разряде записана единица, или флаг сброшен, если в разряде записан нуль. В каждой микро-ЭВМ имеется рекомендуемый формат CSR, который используется для разработки интерфейсов. Операционные системы микро-ЭВМ предусматривают подключение стандартных УВВ, за каждым из которых закреплены стандартные для этой системы адреса, определены форматы CSR и DSR и выполняемые функции. При подключении нестандартных УВВ, что часто возникает в задачах технологического управления, приходится разрабатывать контроллеры и программное обеспечение для их обслуживания. Магистраль PCI Express Итак, для чего понадобилось изобретать новую шину? Ведь, как известно, настольные компьютеры успешно используют периферийную шину второго поколения, PCI, для организации обмена данными с периферийными устройствами. Нашла применение эта шина и в мобильных компьютерах (Cardbus, Mini-PCI), и в серверах (PCI64, PCI-X). Тем не менее, возможности параллельной шины PCI на сегодня уже исчерпаны. Во-первых, шина PCI является параллельной, а значит, ее теоретический предел составляет около 1 ГГц. Самый быстрый на сегодня вариант шины PCI, PCI-X/533, обеспечивает пропускную способность до 4.2 Гб/с, но ценой высоких затрат на разводку печатной платы. В то же время предельная частота работы медного соединения составляет 12 ГГц, но приблизиться к нему при использовании параллельной шины невозможно. Но повышать пропускную способность периферийной шины необходимо. Когда создавалась шина PCI, процессор и память соединялись на гораздо меньшей скорости, чем сейчас. Тогда речь шла о нескольких сотнях Мб/с, а сейчас счет пошел на гигабайты в секунду. Причем с каждым годом пропускная способность шин возрастает. Появляются новые, более быстродействующие проводные и беспроводные интерфейсы: например, гигабитный Ethernet больше не является уделом мощных серверов и рабочих станций, повсеместно распространены FireWire (400 Мбит/с) и USB 2.0 (480 Мбит/с), и даже винчестеры завтра будут подключаться на скорости 150 Мб/с. Сравните это с пропускной способностью нынешней настольной PCI - всего 133 Мб/с. Увеличить ее разрядность и/или частоту без многократного усложнения и удорожания процесса производства просто невозможно. Кроме того, шина PCI не удовлетворяет возросшим требованиям к гибкости, надежности, масштабируемости, функциональности, она применима только для соединения ограниченного класса устройств, ее нельзя эффективно настраивать, тестировать, контролировать, перераспределять потоки данных, управлять потреблением энергии... В общем, слишком много недостатков, чтобы продолжать ее совершенствовать. Шина PCI Express (прежние названия - 3GIO, Arapahoe) является последовательной, но с возможностью наращивать количество независимых линий для гибкого управления пропускной способностью. Например, для подключения не слишком производительных устройств вроде модемов и звуковых карт будет использоваться одна линия (PCI Express x1), а для требовательных к пропускной способности шины 3D-видеокарт - 16-разрядный вариант x16. PCI Express использует дифференциальные сигналы с низким уровнем напряжения, что упрощает ее разводку, снижает потребление и выделение энергии, улучшает помехозащищенность, уменьшает уровень наводок, упрощает сопряжение с будущими низковольтными устройствами. Новая шина не требует отдельных линий для синхронизации, управления, питания и т.д., так как использует кодирование 8b/10b, передает команды, данные, адреса, управляющие сигналы в пакетах. Кроме физического уровня, концепция PCI Express предполагает использование канального (организация очереди пакетов и их проверки по контрольным суммам) и транспортного уровней (виртуальные каналы, архитектура Load-Store, управление потоком, обмен данными по кадрам, общее плоское 64-разрядное адресное пространство). Это позволит существенно расширить сферу применения шины, отделить логический уровень от физического, гибко балансировать между ценой и производительностью. Шина PCI Express будет использоваться не только как периферийная шина для дополнительных контроллеров, но и как канал для соединения чипов. В частности, она заменит нынешнюю AGP, будет использована для коммутации компонентов чипсета (как настольного, так и серверного). Фактически она позиционируется как альтернатива HyperTransport - шине, разработанной AMD и уже применяемой другими производителями чипсетов - NVIDIA, SIS, ALi. Самое замечательное свойство новой шины заключается в том, что она на программном уровне полностью совместима с PCI. Сохранится схема адресации и доступа к устройствам, присущая предыдущей шине, только будут добавлены новые возможности, расширены диапазоны адресов, увеличены наборы команд и т.д. Механические свойства новых соединений тоже не изменятся - планируется использовать похожие слоты, разъемы, не потребуются другие корпусы, блоки питания, шасси. На тех же платах установят слоты и PCI, и PCI Express. Более широкие слоты (x4, x8, x16) будут допускать установку "узких" карт расширения (x1, x4, x8). Для ноутбуков разработаны слоты Mini PCI Express и PCI Express Card, есть решения и для монтируемых в стойку серверов. Общий срок жизни новой шины оценивается приблизительно в 10 лет, после чего неизбежна новая революция - переход на оптические технологии коммутации микросхем. Промышленные компьютеры Процессорная плата 5025А Как отмечалось выше эти платы строятся на основе процессоров V20 (аналог 8088), 386SX, 486SLC, Pentium. Рассмотрим более подробно плату 5025А-386-25, наиболее часто используемую в различных приложениях (рис. 4.3).
Рисунок 4.3 – Процессорная плата 5025A. Процессорная плата 5025А разработана для использования в системе OCTAGON MicroPC. Эта система использует малые компьютерные платы 4,5"х4,9", которые являются 100% совместимыми с IBM PC. Малые размеры, широкий температурный диапазон (-40 - +85С) и использование КМОП микросхем, потребляющих незначительную мощность, делают их идеальными для высокоточных встроенных контроллеров. Плата 5025А имеет два последовательных порта СОМ1 и СОМ2, параллельный порт LPT1, порт клавиатуры (АТ - совместимой) и громкоговорителя, часы/календарь, сторожевой таймер, до 4МВ оперативной памяти, DOS 6.22 в ПЗУ, панельку сопроцессора и три твердотельных диска. Для питания платы требуется только один источник +5В (потребляемый ток 320 мА). Вы можете запрограммировать плату, подсоединив ее к своему PC через последовательный порт или подсоединив к ней клавиатуру, дисплей и дисковод. Имеются три версии платы: 5025А, первая-которая использует 25 МГц 80С386SX, вторая-486-25, которая имеет еще в два раза более высокую производительность, и третья 486-50. Рассмотрим основные особенности платы. ROM-DOS. Плата 5025А - со "встроенной DOS" системой. Плата содержит совместимую с версией 6.22 DOS в ПЗУ. Если вы хотите использовать свою операционную систему, вы можете установить ее в панельку SSD1. Система DOS загружается и работает точно также, как в вашем настольном PC. Для работы ей требуется только 64 Кб оперативной памяти, если загрузка идет в нижнюю часть памяти, и 20 Кб - если используется память в верхних адресах. После запуска DOS оперативная память распределяется следующим образом (рис. 4.4):
Рисунок 4.4 – Распределение памяти. Сторожевой таймер. Сторожевой таймер используется для сброса системы, если программа неожиданно остановится. Сторож включается программным путем. Время срабатывания выбирается перемычкой, и может быть 150 мс, 600 мс или 1,2 с. Резервная батарея и опция часы/календарь. Плата 5025 имеет встроенные часы/календарь типа AT. Внешняя часовая батарея 3,6в присоединяется к плате и питает часы/календарь при выключенном источнике питания. Твердотельные диски. Микросхемы твердотельных дисков вставляются в панельки, которые обозначаются как SSD0, SSD1, SSD2. Панелька SSD0 содержит в ПЗУ BIOS и DOS 6.22. SSD1 используется для хранения прикладных программ. Для этого может использоваться микросхема FLASH EPROM (электрически стираемая ПЗУ) объемом до 512Кб. Программатор FLASH EPROM встроенный на плате, что позволяет перепрограммировать микросхему через последовательный порт. Также могут использоваться предварительно записанные стандартные EPROM (ПЗУ с УФ стиранием) объемом до 512К байт. SSD2 используется преимущественно для хранения данных. Этот диск может содержать статическое ОЗУ объемом до 512Кб. Для сохранения информации при выключении питания статическое ОЗУ должно подпитываться от батареек. Для этого может использоваться внешняя часовая батарея 3,6в или переходная панелька 1213DM со встроенной батареей. Порт громкоговорителя и клавиатуры. На плате расположен 10-штырьковый разъем, к которому может быть подключена с помощью кабеля переходная плата PSK-1, на которой расположен стандартный разъем для подключения любой АТ-совместимой клавиатуры и клеммы для подключения громкоговорителя. Установка платы. Вы можете установить плату прямо в корзину MicroPC или использовать автономно, закрепив четырьмя винтами через имеющиеся крепежные отверстия и подав питание +5В на соответствующие клеммы. Последовательные порты СОМ1 и СОМ2. Порты СОМ1 и СОМ2 программируются на скорости обмена от 150 бод до 115 кбод. Оба порта имеют интерфейс RS232. Напряжения, необходимые для этого, генерируются прямо на плате. СОМ2 также может переключаться перемычкой на стандарт RS422 и RS485 для многопользовательских применений. Параллельный порт LPT1. Параллельный порт принтера может использоваться для поддержки ряда устройств: 1. PC совместимый принтер; 2. 17 цифровых линий ввода/вывода; 3. матричная клавиатура; 4. строчный дисплей. Этот порт имеет 20-штырьковый разъем. Если он используется только как линии ввода/вывода, к нему с помощью кабеля подключается клемная колодка, которая соединяется проводами с оборудованием. Если подсоединяется ЖКИ - дисплей, используется плата интерфейса LCD-IFB, а для вакуумно-флуоресцентного дисплея используется плата интерфейса DP-IFB. Обе платы интерфейсов имеют разъем для подключения матричной клавиатуры. SETUP. На плате 5025 установочная информация хранится в ПЗУ с электрическим стиранием. Поэтому информация сохраняется независимо от напряжения питания и батареи. Пользователь также может хранить свою информацию в этой микросхеме, так как около 1792 байт остаются свободными. Математический сопроцессор. Вы можете установить в панельку сопроцессор Cyrix SX83C87-25 или Intel BOX387SX-25 для увеличения производительности системы. Аппаратный сброс. Вы можете сбросить систему выключением и включением питания; используя имеющуюся на плате кнопку "сброс"; подав команду RESET. Это позволяет получить более полный сброс, чем метод (CTRL) (ALT) (DEL). Системные параметры платы 5025А определяются программой SETUP. Она работает с параметрами конфигурации, сохраняемыми в электрически стираемом ПЗУ. Изменения параметров происходят при запуске программы SETUP. Эта программа встроена в ROM-DOS и имеется на диске утилит 5025А. Для изменения параметров необходимо запустить SETUP. Система будет показывать на дисплее установленные параметры и возможные варианты. Выберите нужный вам вариант, нажимая на клавишу ПРОБЕЛ, затем нажмите ENTER. Можно устанавливать следующие параметры: · скорость передачи СОМ1 от 1200 до 115200 бод (бит/сек). (Может появиться сообщение: для использования порта СОМ1 как консоли (удаленного терминала) на скорости больше 9600 бод вы должны установить перемычку W3(3-4) загрузки BIOS; · тест памяти при включении Enabled/Disabled. Вы можете запретить прохождение теста памяти при включении питания (выбрав Disabled) для ускорения загрузки системы; · тип микросхемы памяти в панельке SSD1. При установке новой микросхемы в SSD1 драйвер не будет видеть ее, пока она не будет запрограммирована; · тип микросхемы памяти в панельке SSD2; · вариант загрузки системы; 1. Загрузка с диска BIOS с использованием ROM-DOS 2. Загрузка с SSD1 с использованием ROM-DOS 3. Загрузка с гибкого или жесткого диска 4. Загрузка с SSD1 с использованием пользовательской DOS; · число гибких дисков 0, 1, 2; · защита записи 0C000H - 0C7FF YES/NO. Эти адреса обычно используются для видео BIOS; · защита записи 0C800H-0CFFFH YES/NO. Эти адреса обычно используются для драйверов жесткого диска, сетевых плат и т.д. · перемещение BIOS в расширенную память YES/NO. Вы можете разрешить системе переместить BIOS (нормально расположенный по адресам 0Е000Н-0F000H) в расширенную память (EXTENDED MEMORY) в системах с объемом памяти 1МВ или больше. Это позволит высвободить больший объем базовой оперативной памяти. · число принтеров Auto check ü 0 ü 1 ü 2 ü 3 Если вы выбрали Auto check, система автоматически проверит порт LPT1 на наличие принтера путем записи в него проверочного байта при загрузке или сбросе. Если вы используете другое устройство вместо принтера и не хотите, чтобы в него записывались данные при загрузке, выберите другую установку. Нажмите ENTER для сохранения изменений или нажмите ESC для выхода без сохранения изменений. Изменения вступят в силу только после перезагрузки системы. При запуске системы с использованием ROM BIOS диск SSD0 инициализируется как диск С, виртуальный диск - как диск D, SSD2 - как диск F, SSD1 не инициализируется пока в него не записана информация. Если в него записана какая либо программа, он инициализируется как диск E. Для организации автоматического запуска программы пользователя при включении питания вы должны в дополнение к прикладной программе также переслать файлы поддержки, такие как COMMAND.COM, CONFIG.SYS, AUTOEXEC.BAT и другие. COMMAND.COM требуется для загрузки платы 5025А с SSD1 с использованием ROM-DOS, AUTOEXEC.BAT для возможности автоматического запуска ваших программ, CONFIG.SYS описывает различные драйверы устройств вашей системы. Для пересылки файлов отформатируйте гибкий диск на вашем PС и скопируйте на него с диска утилит 5025А следующие файлы: COMMAND.COM CONFIG.SYS AUTOEXEC.BAT MEMDRIVE.SYS ФАЙЛЫ вашей программы. и с помощью программы DISKSAVE запрограммируйте SSD1. Как только вы сохранили свои программы и файлы в SSD1, вы можете загрузиться с диска SSD1 и сделать вашу программу самозапускающейся. Для этого: 1.Проверьте, установлена ли перемычка W3(3-4) на плате 5025А. 2.Установите связь между вашим РС и 5025А. 3.Убедитесь, что имя вашей программы указано в файле AUTOEXEC.BAT на SSD1. 4.Запустите SETUP и выберите "Boot from SSD1 using ROM-DOS". 5.Наберите: RESET. Плата сбросится и перезагрузится с диска SSD1. Последовательные порты платы 5025А. Плата 5025 имеет два последовательных порта. Эти порты поддерживают 5-,6-,7- или 8 бит данных, 1-,1.5- или 2 стоп-бита и скорость обмена до 115200 бод. Порт СОМ1 является консолью и предназначен для связи вашего РС и Micro PC. Если вам это не требуется, можете использовать СОМ1 как пользовательский порт, поддерживающий RS232. Для этого есть два способа: 1.Удалите перемычку W3(1-2) и используйте загрузку с SSD1 или гибкого/жесткого диска. 2.Добавьте в систему видеоплату. СОМ2 как RS422/485 порт. СОМ2 переключается перемычкой W5 как RS232 и RS422/485. Если W5(1-2) установлена, порт работает как RS485. Вы можете соединить в одну сеть до 32 устройств, общая длина связи может достигать 1,2 км. Но только один передатчик может быть активен в каждый момент времени. Для соединения порта RS485 с внешними устройствами служит клеммный блок Р3. Соединение может быть двухпроводным (полудуплекс) или четырехпроводным (полный дуплекс). При двухпроводном соединении нужно соединенные вместе клеммы Т+R+ и Т-R- соединить с соответствующими клеммами остальных устройств. При таком соединении все устройства равноправны.
При четырехпроводном соединении нужно клеммы Т+,Т- ведущего устройства (Host компьтера) соединить с клеммами R+,R- ведомых устройств (периферийные компьютеры) соответственно, а клеммы R+,R- - с клеммами Т+,Т- ведомых устройств.
Передатчик и приемник не являются оптически развязанными, поэтому избегайте земляных петель. Вы должны соединять только сигналы линий RS485, но не источников питания и не земель источников питания. Для включения и выключения передатчика программным путем: запишите "1" в порт 20СН (разрешение передачи) запишите "0" в порт 20СН (запрет передачи). Блок перемычек W1 устанавливает или снимает нагрузку сети. Она должна быть установлена у последнего приемника в сети, чтобы не было отражений и не возникало искажений сигнала. Плата АЦП 5710 В составе семейства Micro PC большая номенклатура плат расширения. Это платы цифрового и аналогового ввода/вывода, коммуникационные платы, платы адаптеров различных устройств. Все платы расширения можно использовать и в обычном стандартном персональном компьютере. Для работы с платами расширения используется область адресов портов ввода/вывода с 100Н по 17FH. Для каждой платы отводится 16 адресов, таким образом можно одновременно применять до 8 плат расширения. Для примера рассмотрим плату аналогового ввода/вывода 5710 (рис. 4.5). 5710 - это высокоточный 16-канальный АЦП с разрешением 12 разрядов. Входы могут быть объединены попарно для образования 8-ми дифференциальных каналов для лучшего подавления помех. На входе АЦП стоит инструментальный усилитель с коэффициентом усиления 1, 10 или 100, устанавливаемым перемычками. Встроенный 32-разрядный таймер может быть использован для запуска преобразователя и генерации прерывания. Этот таймер может быть запрограммирован для генерации от 70000 преобразований в секунду до 3 преобразований в час. Также на плате 5710 имеется 19 дискретных линий ввода/вывода и 16-разрядный таймер/счетчик общего применения. Этот таймер/счетчик может быть использован для счета внешних импульсов или может быть подключен к встроенному генератору 4МГц для генерации прецизионной частоты или временного интервала.
Рисунок 4.5 – Плата аналогового ввода/вывода 5710. Кроме этого на плате есть 2х-канальный 12 разрядный цифро-аналоговый преобразователь (ЦАП). Входной диапазон АЦП ±5В; защита от перегрузки входов до ±16В; частота преобразования - 33000 измерений в секунду. Входное напряжение биполярное (как положительное, так и отрицательное). 12-разрядное разрешение позволяет считать значение входного сигнала в диапазоне от -5В до +5В как число от 0 до 4095 соответственно, с шагом 2,44мВ при коэффициенте усиления 1. Нулевое напряжение на входе эквивалентно значению 2048. Если вам необходимо измерять напряжение много меньшее ±5В, вы можете переключить коэффициент усиления инструментального усилителя на плате АЦП в положение х10 или х100 с помощью блока перемычек W2. Выбор коэффициента усиления х10 приведет к изменению входного диапазона до ±500мВ и разрешения до 244 мкВ. При коэффициенте усиления х100 входной диапазон ±50мВ, разрешение 24,4 мкВ. Плата 5710 имеет размеры 4.5"х4.9" и занимает одно посадочное место в корзине Micro PC. Базовый адрес выбирается перемычками и первоначально установлен 100Н. Если у вас в системе есть другая плата с базовым адресом 100Н, вы должны изменить адрес АЦП (или другой платы) с помощью блока перемычек W1. Карта портов АЦП 5710 относительно базового адреса
|