Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система управления двигателемСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
На «классике» управление двигателем осуществляется гидромеханическим регулятором (МЕС) и электронным регулятором (РМС). На NG двигателем управляет двухканальная цифровая система управления не имеющая механической связи с РУДами. Переключение между каналами происходит автоматически при каждом запуске двигателя (или попытке запуска).
Система управления подачей топлива совместно с системами управления поворотными лопатками направляющих аппаратов первых четырех ступеней компрессора высокого давления (КВД) и перепускных клапанов на входе в КВД регулирует тягу двигателя во всех условиях. Гидромеханический регулятор расхода топлива (main engine control (MEC)) устанавливает заданную тягу двигателя, используя в качестве входных сигналов: -положение рычага управления двигателем (РУД) (thrust lever); -температуру воздуха на входе в компрессор (compressor inlet temperature(CIT)); -давление воздуха на выходе из компрессора (compressor discharge pressure (CDP)); -сигналы обратной связи систем управления поворотными лопатками направляющих аппаратов и перепускных клапанов; -обороты ротора высокого давления (N2); -команды электронного блока управления двигателем (power management control (PMC)).
MEC управляет оборотами КВД (N2) в зависимости от положения РУД. При этом автоматически регулируется положение направляющих аппаратов и перепускных клапанов компрессора.
Обороты N2 регулируются не жестко, а с возможностью уточнения в зависимости от условий полета.
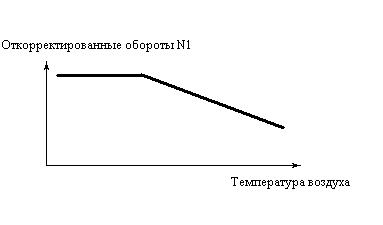
Электронный блок управления двигателем (РМС) управляет оборотами КНД (N1) посредством исполнительного агрегата МЕС. При этом выполняются следующие функции: 1. В функции от положения РУД рассчитываются откорректированные обороты N1 в виде процентного соотношения от максимальных откорректированных оборотов для текущих условий. 2. N1 рассчитываются и поддерживаются для поддержания постоянной тяги двигателя. 3. Рассчитываются и поддерживаются откорректированные обороты N1 из условия не превышения максимально-допустимой температуры газов за турбиной.
4. Рассчитываются и поддерживаются откорректированные обороты N1 из условия поддержания требуемого уровня высотной компенсации. 5. Обеспечивается автоматическое отключение РМС при отказе.
Положение РУД определяет заданную тягу двигателя, которую РМС выдерживает как заданное процентное отношение к полной тяге для текущих условий полета. При этом РМС обеспечивает защиту от превышения оборотов КНД (N1) и от забросов температуры газов (EGT) на переходных процессах.
На рисунке показан характер переходного процесса при разгоне двигателя с выключенным и работающим электронным блоком управления (РМС). Таким образом, при работающем РМС, положение РУД определяет заданный N1. В процессе взлета и набора высоты, РМС рассчитывает N1 таким образом, чтобы тяга двигателя оставалась постоянной.
На NG система управления имеет два режима работы: нормальный и альтернативный. В обоих случаях управление происходит по N1.
Скоростная характеристика двигателя
При законе управления N1 = const и увеличении скорости полёта параметры двигателя будут меняться следующим образом: - увеличение скорости приводит к увеличению степени двухконтурности двигателя (отношение расходов воздуха через внешний и внутренний контур); - это, в свою очередь, приводит к увеличению работы компрессора низкого давления («затяжелению» КНД); - для поддержания постоянства оборотов N1 автоматика увеличивает расход топлива; - в результате увеличивается температура выходящих газов и обороты более «лёгкого» контура высокого давления. Такое изменение параметров двигателя на разбеге и начальном этапе набора высоты приводит к необходимости постоянного контроля за температурой газов (особенно при взлёте на полной тяге при высоких температурах). Это требует дополнительного отвлечения внимания и усложняет выполнение взлёта.
Особенности управления двигателями при выключенном РМС
При выключенном РМС, МЕС выдерживает заданные обороты N2, и в процессе роста скорости на взлете обороты N1 будут возрастать. В зависимости от условий рост N1 может составить до 7%. От пилотов не требуется уменьшать режим в процессе взлета, если не будут превышаться ограничения по двигателю. При выборе режима двигателям на взлете, при выключенном РМС, нельзя использовать технологию имитации температуры наружного воздуха (assumed temperature). В наборе высоты после взлета необходимо следить за оборотами N1 и своевременно корректировать их рост приборкой РУД.
Автомат тяги Автомат тяги - это управляемая компьютером электромеханическая система, которая управляет тягой двигателей. Автомат перемещает РУДы так, чтобы поддерживать заданные обороты N1 или заданную скорость полета в течение всего полета от взлета до касания ВПП. Он рассчитан для работы совместно с цифровой системой управления полетом (DFCS) и навигационным компьютером (FMC).
Принцип совместной работы с DFCS: скорость полёта выдерживается, либо изменением траекторного угла (DFCS) при фиксированном режиме работы двигателей (автомат тяги), либо изменением режима работы двигателей (автомат тяги) при фиксированном траекторном угле (DFCS).
Автомат тяги имеет следующие режимы работы: N1 – выдерживание заданных оборотов вентилятора (величина заданного режима рассчитывается FMC или компьютером А/Т (ЕЕС на NG)); GA – выдерживание пониженного режима для ухода на второй круг; FMC SPD – выдерживание скорости, рассчитанной FMC; MCP SPD - выдерживание скорости, заданной на МСР; RETARD – перевод РУДов на упор малого газа; THR HLD – автомат тяги отключается от управления РУДами; ARM – автомат тяги готов к включению в работу (на NG автомат тяги самостоятельно включится для защиты от потери скорости менее минимально-допустимой). В связи с этим свойством, есть резон при заходе на посадку отключать автомат тяги не кнопками на РУДах, а нажатием кнопки-лампы SPEED на МСР. При этом автомат тяги переходит в режим ARM и, при необходимости ухода на второй круг, установит вам заданную тягу двигателям, а на NG также ещё защитит вас от непроизвольной потери скорости.
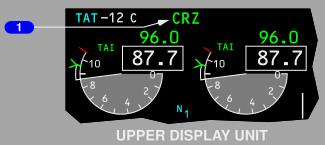
Режим THR HLD (Throttle Hold) включается при работе автомата тяги в режиме Взлёт (кнопка TO/GA нажата на земле) на скорости 80 узлов, индикация режима включается на скорости 84 узла. Пока режим включен изменить режим работы автомата тяги невозможно. РУДы отключены от сервоприводов и свободно перемещаются. Автоматическое прекращение режима происходит: - на «классике» при высоте по радиовысотомеру более 400 футов и по истечении 17,5 секунд после отрыва от ВПП; - на «NG» при высоте по радиовысотомеру более 800 футов и по истечении 10 секунд после отрыва от ВПП. Если после отрыва от ВПП на высоте менее 800 футов повторно нажать кнопку TO/GA, то на Thrust Mode Display (на рисунке обозначен цифрой 1) индикация сменится на GA и «bugs» переместятся на значение Full GA Thrust, но РУДы останутся неподвижными. Если высота при нажатии TO/GA будет более 800 футов, то РУДы переместятся в положение Full GA Thrust.
Компьютер автомата тяги рассчитывает следующие параметры: - максимально-допустимые, для данных условий полёта, обороты вентилятора N1 (автомат тяги получает данный параметр из FMC, а при её отказе начинает использоваться собственным расчётом). В расчёте участвует текущая высота полёта и температура воздуха. Рассчитанный N1 получается больше, чем взлётный N1 при отключенных отборах воздуха от двигателя, но меньше, чем N1, соответствующий выходу двигателя на предельные параметры. - максимальные, для данных условий полёта, обороты вентилятора N1 для набора высоты. Расчёт строится в зависимости от текущей высоты полёта, числа М, температуры торможения воздуха (ТАТ) и модификации двигателя. Рассчитанный N1 получается в пределах (0 ÷ -1%) от аналогичной величины, рассчитанной FMC.
- обороты вентилятора N1 пониженного режима для ухода на второй круг. Режим двигателей рассчитывается из условия обеспечения 8% градиента набора высоты (вертикальной скорости 1000-2000 футов в минуту). Расчёт строится в зависимости от текущей высоты полёта и текущего веса самолёта. - минимальную скорость для данных условий полёта. Данная скорость используется автоматом тяги для определения нижнего предела, ниже которого тяга уменьшена не будет, чтобы не допустить потери скорости. Запас до минимальной скорости определяется разницей между текущим углом атаки и максимально-допустимым углом атаки, рассчитываемым по положению механизации и числу М. Запас по углу атаки пересчитывается в запас по скорости. Ограничение минимальной скорости работает постоянно, за исключением случая, когда автопилот включен в режиме VNAV. В этом случае минимальная скорость полёта рассчитывается FMC.
FMC передает на автомат тяги информацию о режиме работы автопилота, заданных оборотах N1, оборотах максимально продолжительного режима работы двигателя, максимальных оборотов для набора высоты, крейсерского полета и ухода на второй круг, минимальной скорости полёта, температуре воздуха и весе самолёта.
Логика работы автомата тяги при уходе на второй круг представлена на рисунке:
В процессе захода на посадку и ухода на второй круг на пониженном режиме автомат тяги анализирует признак попадания самолёта в нисходящий поток и при его фиксации увеличивает режим работы двигателей вплоть до максимально-допустимого. Признаком попадания в нисходящий поток является разница между траекторным углом движения самолёта внутри воздушной массы (угол тангажа минус угол атаки) и траекторным углом IRS полученным интегрированием вертикальной перегрузки (то есть, траекторным углом в системе координат связанных с Землёй).
Автомат тяги позволяет вмешиваться в управление двигателями. Для этого на электроприводах, перемещающих РУДы, установлены датчики усилий. Как только усилие превышает 2 фунта (0,97 кг), электропривод отключается. Как только усилие пропадает, механизм вновь включается в работу и начинает перемещать РУД. Предусмотрена возможность пересиливания электропривода, если не сработает механизм его отключения. Для этого пилоту нужно будет приложить усилие 18 фунтов (~9 кг).
Чтобы уменьшить активность перемещения РУДов в автомате тяги предусмотрено три уровня чувствительности к изменению скорости полёта. Наибольшая чувствительность включается на этапе захода на посадку по сигналу захвата радиоглиссады или при снижении ниже 2000 футов по радиовысотомеру и выпуске закрылков на угол более 12,5°. Средняя степень чувствительности устанавливается при выпуске закрылков на угол более 0,5°, приближении или уходе с заданной высоты полёта, приближении к минимальной скорости. Наименьшая степень чувствительности автомата тяги в крейсерском полёте.
Для более плавного управления двигателями в горизонтальном полете, кратковременные отклонения от заданной скорости автомат тяги передаёт автопилоту, как отклонение в выдерживании высоты. Например, при кратковременном уменьшении скорости автопилот начинает снижение с вертикальной скоростью до 300 футов в минуту, восстанавливая потерянную скорость без увеличения тяги двигателей. При этом максимальное изменение высоты допускается не более 50 футов от заданной. Данная функция отключается при крене более 11,5 градусов.
Автомат тяги самостоятельно переведёт РУДы обоих двигателей на малый газ через 1,5 ÷ 2,5 секунды после начала выравнивания самолёта при автоматической посадке (flare) или, если был включен режим выдерживания заданной скорости и закрылки выпущены на угол более 12,5°, при снижении через высоту 27 футов по радиовысотомеру. Данная функция автомата тяги привела к катастрофе 25 февраля 2009 года в Амстердаме. Тогда отказавший радиовысотомер показал на высоте 2000 футов значение -7 футов, что вызвало команду автомата тяги на уборку РУДов на малый газ. К сожалению пилоты этого своевременно не заметили.
При расхождении положений РУДов более чем на 10°: - на «классике» произойдёт автоматическое отключение автомата тяги при заходе на посадку в двухканальном режиме автопилота (после индикации сигнала FLARE); - на «NG» произойдёт автоматическое отключение автомата тяги на любом режиме, кроме A/T GA. Также отключение автомата тяги произойдёт при существенной разнице в тягах двигателей и отклонении колеса штурвальной колонки более чем на 10°.
Особенности работы автомата тяги при отказе FMC
Компьютер автомата тяги (блок управления двигателем EEC на NG) рассчитывает собственные максимально-допустимые обороты N1. В случае, когда FMC не выдаёт достоверного сигнала о максимально-допустимом N1, автомат тяги переходит на использование собственного ограничения в управлении двигателями и индицирует пилотам сигнал «A/T LIM». Если в этот момент двигатели работали на взлётном режиме, то произойдет отключение автомата тяги с индикацией отказа «A/T».
|
||||||||
|
|
Последнее изменение этой страницы: 2017-01-24; просмотров: 777; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.89.2 (0.012 с.) |