Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности работы автомата тяги при неработающем РМССодержание книги
Поиск на нашем сайте
При неработающем РМС теряется жёсткая зависимость между положением РУД и заданными оборотам N1. Чтобы не допустить заброса оборотов, автомат тяги уменьшает передний предел отклонения электромеханизма управления РУД с 65 до 55 градусов.
Расход топлива
На земле при работе двигателей на малом газу расход топлива 11 кг/мин (на оба двигателя).
Особенности высотной характеристики двигателей с тягой 18,5К и 20К
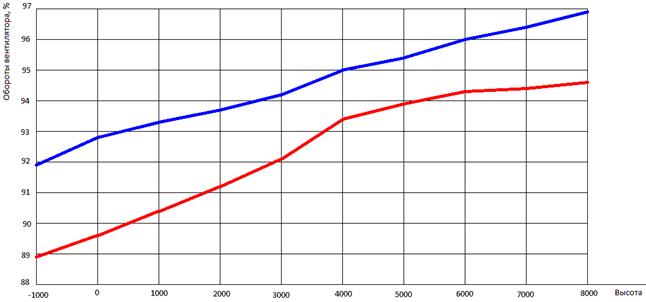
Для получения приемлемых взлётных характеристик самолётов, оснащённых данными двигателями, в высокогорном аэропорту США Далласе, высотная характеристика была изменена. Заданные обороты вентилятора на взлётном режиме были увеличены в диапазоне абсолютных высот 4000-6000 футов. Это привело к увеличению тяги двигателя, но вместе с тем уменьшило запас до достижения максимально-допустимой температуры газов 930ºС. Для иллюстрации изображены зависимости заданных оборотов вентилятора для режима ухода на второй круг от абсолютной высоты, взятые из QRH раздела Performance in flight для температуры воздуха +10ºС. Красная линия показывает заданные обороты для двигателя 20К, а синяя – для 22К. На красной линии виден подъём характеристики в районе 4-6 тысяч футов. На практике на высокогорных аэродромах на этих двигателях следует ожидать роста EGT на разбеге и после отрыва.
Более подробную информацию по этому вопросу можно почитать http://aviacom.ucoz.ru/CESM_015.pdf.
Плохая приёмистость двигателей CFM56-7B на высотах полёта более FL300.
На «800»-ках управление двигателем осуществляется электронным блоком (ЕЕС). Особенности работы данного блока определяются версией программного обеспечения. Если в ЕЕС загружена версия 7.B.U1, то двигатель на большой высоте будет медленно реагировать на перемещение РУД, как на увеличение, так и на уменьшение режима. В версии 7.B.V2 скорость реакции двигателя на сброс режима вернули в норму, но осталась медленная реакция на увеличение режима работы двигателя. Данная особенность в поведении двигателя возникает на высоте более FL300 и при уменьшении N1 менее 60% на время менее 60 секунд. Поэтому, чтобы не допустить потери скорости в крейсерском полёте, Боинг рекомендует при непреднамеренном увеличении скорости не уменьшать режим менее 60% N1 и плавно вытягивать speed brakes. Данный недостаток они обещают исправить в версии 7.B.W
Реверс тяги Реверс тяги создаётся за счёт разворота потока воздуха внешнего контура двигателя навстречу движению самолёта. При этом внутренний контур двигателя продолжает создавать прямую тягу. Таким образом, эффективность реверса весьма мала. Для того, чтобы перевести двигатель на режим реверса тяги, необходимо, чтобы хотя бы один из двух радиовысотомеров выдал сигнал о высоте полёта менее 10 футов или же из системы «земля - воздух» пришёл сигнал, что самолёт находится на земле.
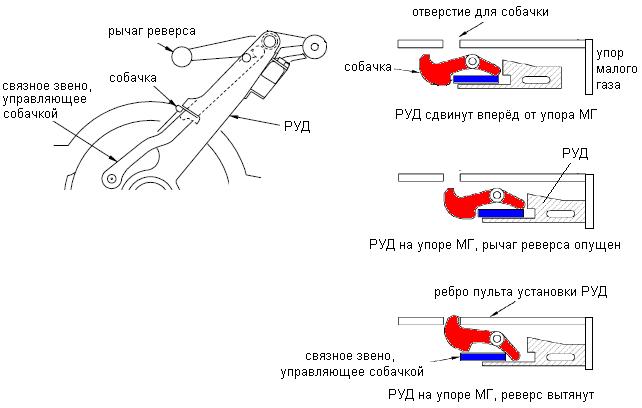
Конструкция рычагов управления двигателями исключает поднятие рычагов реверса при РУД не установленных на упор малого газа и перемещение РУД вперёд при поднятых рычагах реверса. Это достигнуто с помощью собачки и связного звена, связанного с рычагами реверса. При вытягивании рычагов реверса это звено отходит вперёд от РУД. Это возможно только при положении РУД на упоре МГ. При этом собачка загоняется в отверстие в пульте и блокирует перемещение РУД.
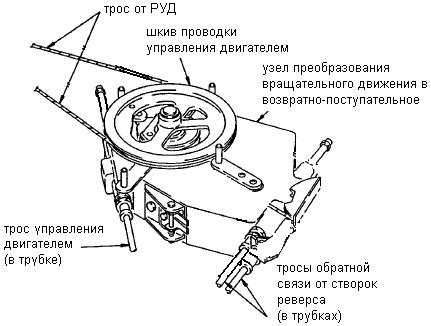
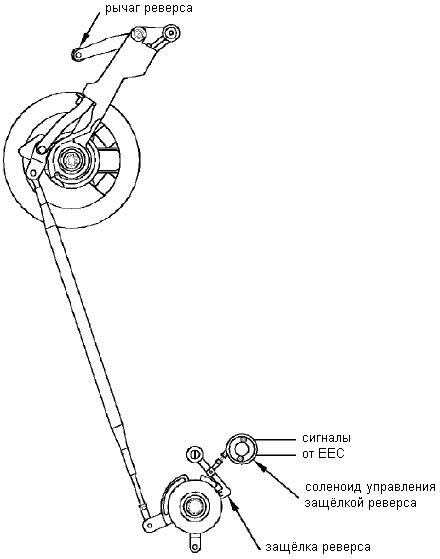
На классике управление двигателями тросовое. Тросы идут вдоль фюзеляжа и крыла вплоть до пилонов двигателей. Далее стоит устройство преобразования вращательного движения шкива тросовой проводки в возвратно-поступательное движение троса, уложенного в трубку. Это преобразование происходит за счёт шестерни, находящейся на одном валу со шкивом, и зубчатой рейки, связанной с торсом, передающим перемещение на МЕС.
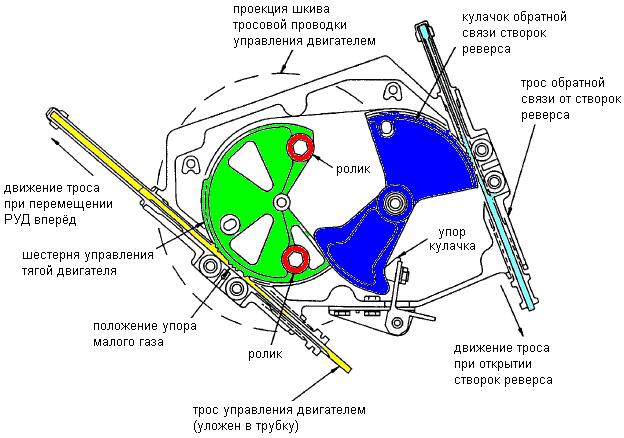
В данном узле осуществляется механическая блокировка перемещения тросовой проводки управления двигателями на период времени, пока створки реверса перемещаются из закрытого положения в открытое и обратно. Это осуществляется с помощью двух роликов, установленных на шестерне управления тягой двигателей (зелёная) и кулачка обратной связи (синий), вращающегося под воздействием троса от створок реверса. На рисунке показано положение - РУД на МГ, реверс закрыт. При поднятии рычага реверса зелёная шестерня повернётся против часовой стрелки и нижний ролик упрётся в кулачок. Далее створки открываются, синий кулачок проворачивается по часовой стрелке и освобождает нижний ролик. Теперь можно дальше поднимать рычаг реверса. При закрытии реверса устройство работает аналогично.
Теперь представим, что двигатель работает на прямой тяге (зелёная шестерня повёрнута по часовой стрелке и верхний ролик находится недалеко от синего кулачка). Если в это время произойдёт самопроизвольное открытие створок реверса, то кулачёк, вращаясь по часовой стрелке, будет давить на верхний ролик и, таким образом, поворачивать зелёную шестерёнку против часовой стрелки. Что приведёт к механическому перемещению РУД в сторону МГ и будет блокировать возможность перемещения РУД вперёд.
На NG механической связи РУДов с двигателями нет. Функцию ограничения движения рычага реверса играет специальная защёлка, расположенная на блоке исполнительных механизмов автомата тяги под полом пилотской кабины (см. рисунок внизу). Эта защелка управляется соленоидом, который в свою очередь получает сигналы от ЕЕС. Когда створки реверса откроются более чем на 60% от своего полного хода, ЕЕС подаёт питание на соленоид, и он открывает защёлку. После этого рычаг реверса можно поднять выше положения «INTERLOCK».
Механического перемещения РУД на малый газ при непроизвольном открытии створок реверса (как на классике) не происходит.
Скорость полета
Номенклатура скоростей, используемых в руководствах Боинг: - Приборная скорость (Indicated или IAS) - показание указателя воздушной скорости без учёта поправок. - Индикаторная земная скорость (Calibrated или CAS). Индикаторную земную скорость получают из приборной скорости путём внесения аэродинамической и инструментальной поправок. - Индикаторная скорость (Equivalent или EAS). Индикаторную скорость получают из индикаторной земной скорости путём внесения поправки на сжимаемость воздуха. - Истинная скорость (True или TAS). Истинную скорость получают из индикаторной скорости путём внесения поправки на плотность воздуха.
Пояснения к скоростям начнем в обратном порядке. Истинная скорость самолета – это его скорость относительно воздуха. Измерение воздушной скорости на самолете осуществляется с помощью приемников воздушного давления (ПВД). В них замеряется полное давление заторможенного потока р* (pitot) и статическое давление р (static). Предположим, что ПВД на самолете – идеальное и не вносит никаких погрешностей и, что воздух несжимаем. Тогда прибор, измеряющий разность полученных давлений, измерит скоростной напор воздуха р* - р = r*V2/2. Скоростной напор зависит как от истинной скорости V, так и от плотности воздуха r. Поскольку градуировка шкалы прибора производится в земных условиях при стандартной плотности, то в этих условиях прибор будет показывать истинную скорость. Во всех остальных случаях прибор будет показывать отвлечённую величину, называемую индикаторной скоростью Vi = VÖr/rстандарт = VÖD.
Индикаторная скорость Vi играет важную роль не только как величина, необходимая для определения воздушной скорости. В горизонтальном установившемся полете при заданной массе самолета она однозначно определяет его угол атаки и коэффициент подъемной силы.
Учитывая, что при скоростях полета более 100 км/час начинает проявляться сжимаемость воздуха, реальная разница давлений, замеренная прибором, будет несколько больше. Данная величина будет называться земной индикаторной скоростью Viз (calibrated Vc). Разность Vi-Viз называется поправкой на сжимаемость и увеличивается по мере роста высоты и скорости полета.
Летящий самолет искажает статическое давление вокруг себя. В зависимости от точки установки приемника давления прибор будет замерять несколько разные статические давления. Полное давление практически не искажается. Поправка на расположение точки замера статического давления называется аэродинамической (correction for static source position). Также возможна инструментальная поправка на отличие данного прибора от стандарта (у Боинга принята равной нулю). Таким образом, величина, показанная реальным прибором, подключенным к реальному ПВД, называется приборной скоростью (indicated).
На совмещенных указателях скорости и числа М индицируется земная индикаторная (calibrated) скорость от компьютера высотно-скоростных параметров (Air data computer). На комбинированном указателе скорости и высоты индицируется приборная (indicated) скорость, полученная по давлениям, взятым непосредственно из ПВД.
Рассмотрим типичные неисправности, связанные с ПВД. Обычно экипаж распознает проблемы в процессе взлета или вскоре после отрыва от земли. В большинстве случаев это проблемы, связанные с замерзанием воды в трубопроводах. В случае закупорки трубопровода полного давления (pitot probes) указатель скорости не покажет увеличения скорости в процессе разбега на взлете. Однако после отрыва скорость начнет расти, поскольку статическое давление будет уменьшаться. Высотомеры будут работать практически правильно. При дальнейшем наборе скорость будет расти через правильное значение и далее превысит ограничение с соответствующим срабатыванием сигнализации (overspeed warning). Сложность данного отказа в том, что какое-то время приборы будут показывать практически нормальные показания, что может вызвать иллюзию восстановления нормальной работы системы. В случае закупорки трубопровода статического давления (static ports) в процессе разбега система будет работать нормально, но в процессе набора высоты покажет резкое уменьшение скорости вплоть до нуля. Показания высотомеров останутся на высоте аэродрома. Если пилоты пытаются сохранить требуемые показания скорости путем уменьшения тангажа в наборе высоты, то, как правило, это заканчивается выходом за ограничения по максимальной скорости. Кроме случаев полной закупорки возможна частичная закупорка или разгерметизация трубопроводов. При этом распознать отказ может быть значительно сложнее. Ключевым моментом является распознание систем и приборов, не затронутых отказом и завершение полета с их помощью. Если есть индикация угла атаки – пилотировать внутри зеленого сектора, если нет – установить тангаж и обороты двигателей N1 в соответствие с режимом полета по таблицам «Unreliable airspeed» в QRH. По возможности выйти из облаков. Попросить помощь у службы движения, учитывая, что они могут иметь неправильную информацию о вашей высоте полета. Не доверять приборам, показания которых были под подозрением, но в данный момент, кажется, работают правильно. Как правило, надежная информация в этом случае: инерциальная система (положение в пространстве и путевая скорость), обороты двигателей, радиовысотомер, срабатывание stick shaker (приближение к сваливанию), срабатывание EGPWS (опасное сближение с землей).
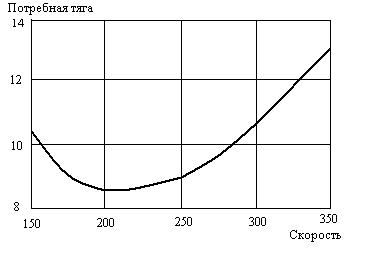
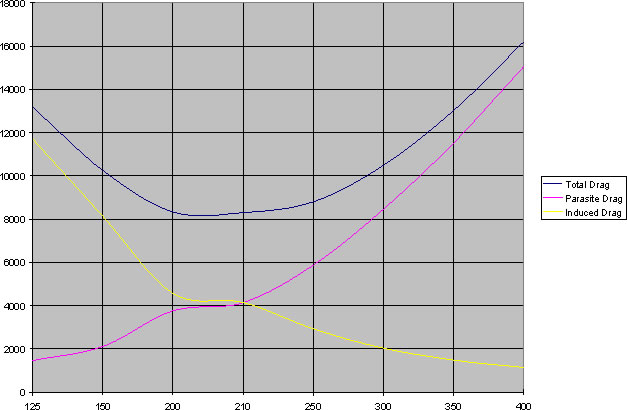
На графике показана потребная тяга двигателя (сила сопротивления самолета) в горизонтальном полете на уровне моря в стандартной атмосфере. Тяга указана в тысячах фунтов, а скорость – в узлах.
Наивыгоднейшая скорость (скорость минимального лобового сопротивления) в полётной конфигурации самолёта может быть рассчитана по следующей мнемонической формуле: Vнаивыг = 2,2 * (G – 50) + 215 Где G – текущий вес самолёта в тоннах, а результат получится в узлах. Например: вес 60 тонн. Отнимаем 50, остаётся 10, умножаем на 2,2 - получаем 22, складываем с 215, получаем 237 узлов. Данная формула получилась из анализа скоростей FMC со странички Climb режим Max angle, поскольку именно на наивыгоднейшей скорости самолёт имеет максимальный угол набора высоты или же минимальный угол снижения при планировании.
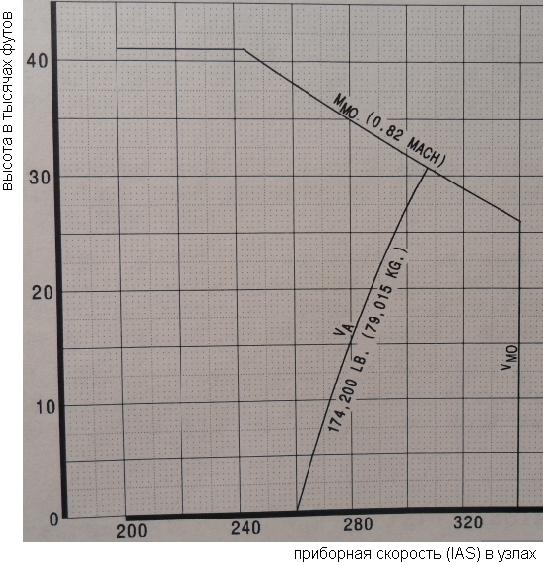
Расчётная скорость маневрирования (VA) – это скорость, ограничения маневрирования самолёта. Если скорость больше или равна VA, то нельзя использовать полные углы отклонения рулей и выводить самолёт на углы атаки, близкие к критическим, поскольку при этом нагрузки на элементы конструкции могут превысить предельно допустимые значения. (см. http://aviacom.ucoz.ru/Principleflight4.doc стр. 4)
Скорости для Classic
VMO/MMO (maximum operating limit speed/ Mach) Скорость/ число М максимальные эксплуатационные равны 340 узлов / 0.82 М
На фото VA для 737-800.
Расчет центровки самолета
Основным документом по загрузке и центровке на борту является WBM (Weight and Balance control and loading Manual). Но в практике он не используется. Центровка обычно рассчитывается вручную с использованием бланка Trimsheet или же автоматически с использованием специальной программы, когда экипажу приносят уже готовые цифры.
WBM и Trimsheet используют разные понятия для определения центровки самолёта. В WBM используется понятие B.A. (Balance Arm). Это расстояние в дюймах от условной точки, расположенной на оси самолёта впереди носа самолёта, до поперечного сечения, в плоскости которого находится интересующий нас объект. В качестве примера далее в тексте будет рассматриваться модификация 737-500. Для этой модификации точка отсчёта расположена на расстоянии 104 дюйма впереди носа самолёта. Зная B.A. каждого элемента самолёта и, умножив его на соответствующий вес, получим момент силы тяжести данного элемента относительно точки отсчёта. Просуммировав все моменты от каждого элемента, получим суммарный момент. Разделив суммарный момент на суммарный вес всего самолёта, получим расстояние (B.A.) центра тяжести самолёта от точки отсчёта. Отняв от этого расстояния удаление передней кромки САХ от начала отсчёта (625,6 дюйма) и разделив на длину САХ (134,5 дюйма) получим координату центра тяжести, выраженную в процентах САХ.
хТ = (B.A. – 625,6) / 134,5 * 100%
В Trimsheet используется понятие LI (Loaded Index). Это условное понятие, численно равное моменту силы тяжести самолёта относительно точки, удалённой на 648,5 дюймов(737-500) от точки отсчёта, используемой в WBM. То есть, приблизительно от центра самолёта. Для удобства этот момент разделен на константу 30000 и, чтобы не допускать отрицательных значений, к результату деления добавляют константу 40.
LI = [G * (B.A. – 648,5)] / 30000 + 40, где G – вес самолёта в рассматриваемом варианте (пустой, снаряженный без топлива, взлётный, посадочный и т.д.); B.A. – расстояние от точки отсчёта по WBM до центра тяжести самолёта. Отправной точкой в расчётах центровки по Trimsheet являются заранее рассчитанные значения DOW и DOI. В DOW (Dry Operating Weight) входит вес снаряженного самолёта, вес экипажа, экипажного багажа, кухни и воды, заправленной в систему водоснабжения. DOI (Dry Operating Index) – момент центра тяжести самолёта в описанном выше состоянии, рассчитанный по описанной выше методике. Далее расчёт смещения центра тяжести в процессе загрузки самолёта происходит по следующей методике: Для каждого отсека багажника, каждой секции пассажирской кабины, каждого количества заправляемого топлива рассчитаны изменения в LI. Эти изменения суммируются, и получается требуемый LI самолёта. Если к DOI добавить поправку на размещение багажа, то получится DLI (Deadload Index). Когда к DLI добавят поправку на размещение пассажиров, то получится LIZFW (Loaded Index at Zero Fuel Weight). Прибавляя поправку на количество находящегося на борту топлива получим LITOW (Loaded Index at Take-Off Weight) или LILAW (Loaded Index at LAnding Weight). Зная LI самолёта можно рассчитать положение центра тяжести в % САХ по вышеуказанной формуле:
хТ = (B.A. – 625,6) / 134,5 * 100%, где B.A. находится по следующей зависимости:
B.A. = [(LI – 40) * 30000] / G +648,5, где G – соответствующий вес самолёта.
Или же данный расчёт производится графически на бланке Trimsheet.
На фото – немного не рассчитали с центровкой.
Взлет самолета Траектория взлета простирается от точки старта до набора высоты 1500 футов, или окончания уборки закрылков с достижением скорости VFTO (final takeoff speed), какая из этих точек выше. Максимальный взлетный вес самолета ограничивается следующими условиями: 1. Максимально-допустимой энергией, поглощаемой тормозами, в случае прерванного взлета. 2. Располагаемой дистанцией взлета. 3. Максимально-допустимой сертифицированной взлетной массой. 4. Максимально-допустимой путевой скоростью отрыва от ВПП (по прочности пневматиков). Обычно 225 узлов, но возможно 195 узлов. Эта скорость написана прямо на пневматиках. 5. Минимальной эволютивной скоростью разбега; VMCG ( minimum control speed on the ground ) 6. Минимально-допустимым градиентом набора высоты. 7. Максимально-допустимым временем работы двигателя на взлетном режиме (5 минут), в случае продолженного взлета для набора необходимой высоты и разгона для уборки механизации. 8. Минимально-допустимой высотой пролета над препятствиями.
Разделим эти условия на две группы: первая – с 1 по 5 (ограничения, накладываемые используемой ВПП) и вторая – с 6 по 8 (ограничения, обеспечивающие безопасность полета после отрыва от ВПП).
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-24; просмотров: 666; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.203.104 (0.009 с.) |