Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система улучшения устойчивости по скорости на малых скоростяхСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
(Speed Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS) и работает только при отключенном автопилоте. Система управляет стабилизатором с помощью сервопривода автопилота для обеспечения устойчивости по скорости. Её срабатывание возможно вскоре после взлета или при уходе на второй круг. Условиями, способствующими срабатыванию, являются малый вес, задняя центровка и высокий режим работы двигателей. См. (http://aviacom.ucoz.ru/Principleflight2.doc) стр. 17-18, 23 Система улучшения устойчивости по скорости применяется в области полетов на скоростях 90 – 250 узлов. Если компьютер улавливает изменение скорости, то система автоматически включается при выпущенных закрылках (на 400/500 независимо от закрылков), оборотах двигателей N1 более 60%. При этом должно пройти более 5 секунд после предыдущего ручного триммирования и не менее 10 секунд после отрыва от ВПП. Принцип работы заключается в перекладывании стабилизатора в зависимости от изменения скорости самолета, таким образом, чтобы при разгоне самолет имел тенденцию к задиранию носа и наоборот. (При разгоне 90 – 250 узлов стабилизатор автоматически перекладывается на 8 градусов на кабрирование). Кроме изменений скорости компьютер учитывает обороты двигателей, вертикальную скорость и приближение к сваливанию. Чем выше режим двигателей, тем быстрее начнет срабатывать система. Чем больше вертикальная скорость набора высоты, тем больше стабилизатор отрабатывает на пикирование. При приближении к углам сваливания система автоматически отключается. При торможении самолёта стабилизатор автоматически перекладывается на пикирование. Система двухканальная. При отказе одного канала полет разрешается. При двойном отказе вылетать нельзя. Если двойной отказ произошел в полете, QRH не требует никаких действий, но логично было бы повысить контроль за скоростью на этапах захода на посадку и ухода на второй круг.
21 мая 2009 года AAIB (Air Accidents Investigation Branch) - бюро расследований происшествий на авиационном транспорте Великобритании опубликовало отчет о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года. Согласно отчета, самолет при заходе на посадку потерял скорость до 82 узлов (20 узлов менее VREF), вышел на режим сваливания. Экипаж при выводе самолета из сваливания вывели двигатели на режим превышающий полную взлетную мощность. При этом, кабрирующий момент от двигателей был так велик, что для его парирования не хватило полной отдачи штурвальной колонки от себя и тангаж самолета увеличился до 44 градусов. AAIB подчеркнуло в своем отчете, что в QRH (Quick Reference Handbook) не отражен тот факт, что для вывода самолета из сваливания может потребоваться использование стабилизатора для противодействия кабрирующему моменту двигателей и что экипажи должны быть предупреждены об этом.
Путевое управление
Путевое управление самолетом обеспечивается рулем направления. Перемещения педалей управления по тросовой проводке передаются на вертикально расположенную трубу (torque tube) в киле самолета. Вращение этой трубы через тяги связи передается на главный рулевой привод (main PCU) и резервный рулевой привод (standby PCU). К этой же трубе снизу прикреплен загружатель педалей (feel and centering unit), который имитирует аэродинамическую нагрузку на педалях и обеспечивает фиксированное положение руля направления при работе рулевого привода. На руле отсутствует сервокомпенсатор, то есть отклонять руль направления в полете мускульным усилием практически невозможно. Главный рулевой привод работает от гидросистем А и В. Резервный привод питается от резервной (standby) гидросистемы. Работа любой из трех гидросистем полностью обеспечивает путевое управление. В главный рулевой привод встроен исполнительный механизм демпфера рысканья. (см. Боковая устойчивость и управляемость.) Он запитан от гидросистемы В. Триммирование руля направления с помощью ручки на центральном пульте осуществляется смещением нейтрали механизма триммерного эффекта. Там же находится шкала с указателем отклонения руля направления в units. На самолетах серии 300-500 производилась модификация схемы управления рулем направления (RSEP modification). RSEP –Rudder System Enhancement Program. Внешний признак выполнения данной модификации – дополнительное табло «STBY RUD ON» в левом верхнем углу панели FLIGHT CONTROL. Модификация должна быть выполнена на всех самолетах до ноября 2008 года. Причиной явились две катастрофы и инцидент, в которых предположительной причиной назван отказ рулевого привода руля направления. Первая катастрофа произошла 3 марта 1991 года с Боингом 737-200 в районе города Colorado Springs в США. (Источник информации: NATIONAL TRANSPORTATION SAFETY BOARD WASHINGTON, D.C. 20594 AIRCRAFT ACCIDENT REPORT) За 6 дней до катастрофы на этом самолете в полете возникло правое скольжение, которое экипаж устранил, выключив демпфер рыскания. Техсостав провел работы по демпферу, но скольжение повторилось через два дня снова. Опять демпфер был выключен и на земле были выполнены работы. В дальнейших полетах, вплоть до катастрофы, замечаний не было. 3 марта в 9.37 утра второй пилот доложила, что полосу наблюдает, и получила разрешение на визуальный заход на полосу 35. Ветер был 320 градусов 16 порывы 29 узлов. Также диспетчер доложил, что предшествующий борт докладывал о сдвиге ветра на глиссаде. В 9.41 диспетчер дал команду после посадки не пересекать полосу 30, которая занята взлетающими бортами. Второй пилот подтвердила прием информации. Это была последняя передача экипажа. В процессе разворота на посадочный с креном 20 градусов второй пилот доложила «1000 футов». В последующие 4 секунды темп разворота резко усилился. Она сказала «О, бог», тяга двигателей стала возрастать, поступила команда командира «Закрылки 15», что говорило о попытке уйти на второй круг. Тем не менее, вращение продолжалось, скорость выросла до 200 узлов и перегрузка до 4. При столкновении самолет пикировал с углом тангажа 80 градусов.
Вторая катастрофа произошла 8 сентября 1994 года с Боингом 737-300 в районе города Aliquippa в США.
Инцидент произошел 9 июня 1996 года в районе города Richmond в США.
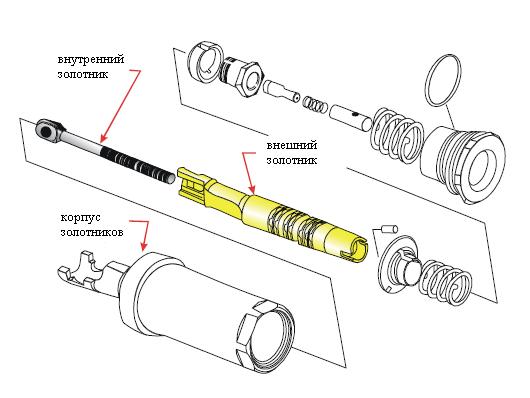
Предположительной причиной этих происшествий был самопроизвольный уход руля направления в крайнее положение. Это приводило к неконтролируемому кренению самолёта. Главный рулевой привод руля направления до модификации RSEP имел двойной золотник (внутренний и внешний). Если они были слишком плотно подогнаны и имели значительное трение между собой, а пилот, по каким – либо причинам, допускал резкое движение педалями, то золотник мог уйти в крайнее положение и, соответственно, открыть путь гидрожидкости к полному неконтролируемому отклонению руля.
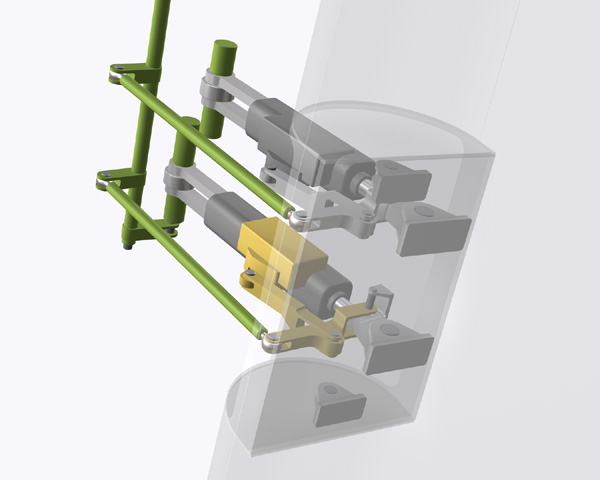
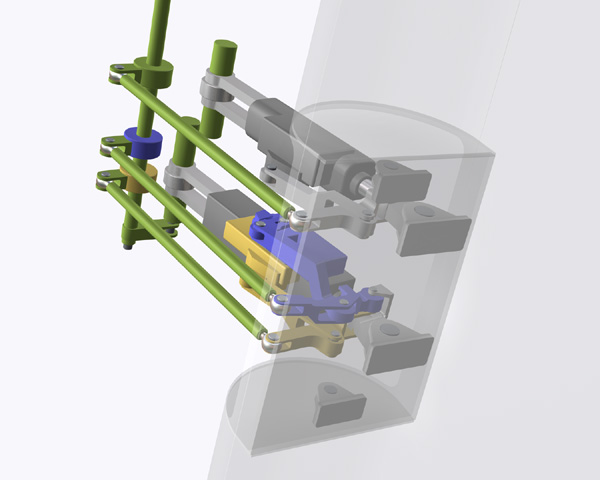
После модификации RSEP в главном рулевом приводе руля направления стало два независимых золотника, работающих от системы А и В. Соответственно к каждому из них подходит независимый рычаг управления. См. рисунки: вверху до модификации, внизу – после.
Поскольку сейчас на одном рулевом приводе появилось два независимых входа при фактически одном выходе, то появилась возможность возникновения усилий внутри рулевого привода. За этой ситуацией следит датчик внутренних усилий FFM (force fight monitor), который сразу же включает арбитра – резервную гидросистему с резервным рулевым приводом руля направления. Резервный рулевой привод помогает исправному каналу перебороть отказавший. В кабине пилотов при этом загораются сигналы: “Master Caution” с “FLT CONT” и на верхнем пульте - лампа “STBY RUD ON”. Согласно QRH от пилотов в этом случае требуется избегать больших или резких движений педалями.
Поскольку полное отклонение руля высоты может потребоваться только на этапах взлёта, посадки и ухода на второй круг для парирования разворачивающего момента при отказе двигателя, а на остальных этапах полёта это не нужно и даже опасно, то в системе управления рулём направления предусмотрено ограничение давления подаваемой гидрожидкости. На «классике» это ограничение включается при наборе высоты более 1000 футов и отключается при снижении ниже 700 футов. На «NG» это происходит, соответственно, при разгоне скорости более 135 узлов и при торможении менее 135 узлов. У пилотов нет ни какой индикации работы системы ограничения давления, за исключением – на «классике», если в гидросистеме А прошла команда на увеличение давления, а оно не увеличилось, то загорается лампа “LOW PRESSURE” на пульте FLT CONTROL «A».
|
||||
|
|
Последнее изменение этой страницы: 2017-01-24; просмотров: 747; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.3.17 (0.008 с.) |