
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Что надо знать о гребном винте?Содержание книги
Поиск на нашем сайте
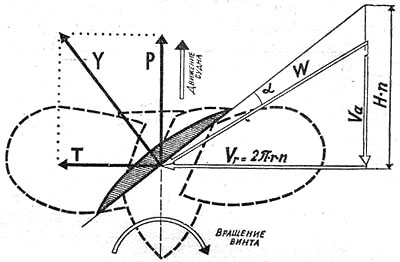
Как работает гребной винт? Гребной винт (рисунок 1.9) преобразует вращение вала двигателя в упор - силу, толкающую судно вперед. При вращении винта на поверхностях его лопастей, обращенных вперед - в сторону движения судна (засасывающих), создается разрежение, а на обращенных назад (нагнетающих) - повышенное давление воды. В результате разности давлений на лопастях возникает сила Y (ее называют подъемной). Разложив силу на составляющие - одну, направленную в сторону движения судна, а вторую перпендикулярно к нему, получим силу Р, создающую упор гребного винта, и силу Т, образующую крутящий момент, который преодолевается двигателем.
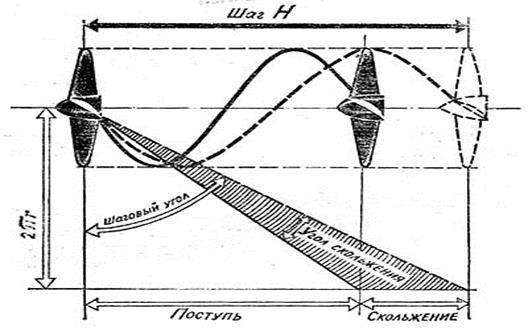
Если α больше оптимальной величины, то мощность двигателя непроизводительно затрачивается на преодоление большого крутящего момента; если же угол атаки мал, подъемная сила и, следовательно, упор Р будут невелики, мощность двигателя окажется недоиспользованной. На схеме, иллюстрирующей характер взаимодействия лопасти и воды, α можно представить как угол между направлением вектора скорости набегающего на лопасть потока W и нагнетающей поверхностью. Вектор скорости потока W образован геометрическим сложением векторов скорости поступательного перемещения Va винта вместе с судном и скорости вращения Vr, т. е. скорости перемещения лопасти в плоскости, перпендикулярной оси винта. Винтовая поверхность лопасти. На рисунке 1.9 показаны силы и скорости, действующие в каком-то одном определенном поперечном сечении лопасти, расположенном на каком-то определенном радиусе r гребного винта. Окружная скорость вращения vr зависит от радиуса, на котором сечение расположено (vr - 2πrn, где n - частота вращения винта, об/с). Скорость же поступательного движения винта va остается постоянной для любого сечения лопасти. Таким образом, чей больше r, т. е. чем ближе расположен рассматриваемый участок к концу лопасти, тем больше окружная скорость vr, а следовательно, и суммарная скорость W. Так как сторона Va в треугольнике рассматриваемых скоростей остается постоянной, то по мере удаления сечения лопасти от центра необходимо разворачивать лопасти под большим углом к оси винта, чтобы α сохранял оптимальную неличину, т. е. оставался одинаковым для всех сечений. Таким образом, получается винтовая поверхность с постоянным шагом Н. Напомним, что шагом винта называется перемещение любой точки лопасти вдоль оси за один полный оборот винта. Скорость судна, скорость винта и скольжение. При движении корпус судна увлекает за собой воду, создавая попутный поток, поэтому действительная скорость встречи винта с водой va всегда несколько меньше, чем фактическая скорость судна V. У быстроходных глиссирующих мотолодок разница невелика - всего 2-5%, так как их корпус скользит по воде и почти не "тянет" ее за собой. У катеров, идущих со средней скоростью хода эта разница составляет 5-8%, а у тихоходных водоизменшющих глубокосидящих катеров достигает 15-20%. Сравним теперь теоретическую скорость винта H*n со скоростью его фактического перемещения va относительно потока воды (рисунок 1.10). Пусть это будет "Казанка", идущая под мотором "Вихрь" со скоростью 42 км/ч = (11,7 м/с). Скорость натекания воды да винт окажется на 5% меньше: H*n–va=(1–0.05)*11.7=11.1м/с Гребной винт на "Вихре" имеет шаг Н=0.3 м и частоту вращения n=2800/60=46.7 об/с. Теоретическая скорость винта: H*n=0.3*46.7=14 м/с. Таким образом, мы получаем разность H*n–va =14-11.1=2.9м/с. Эта величина, называемая скольжением, и обуславливает работу лопасти винта под углом атаки α к потоку воды, имеющему скорость W. Отношение скольжения к теоретической скорости винта в процентах называется относительным скольжением. В нашем примере оно равно
Максимальной величины (100%) скольжение достигает при работе винта на судне, пришвартованном к берегу. Наименьшее скольжение (8-15%) имеют винты легких гоночных мотолодок на полном ходу; у винтов глиссирующих прогулочных мотолодок и катеров скольжение достигает 15-25%, у тяжелых водоизмещающих катеров 20-40%, а у парусных яхт, имеющих вспомогательный двигатель, 50-70%.
Рисунок 1.10. Соотношение скорости лодки и осевой скорости винта.
Коэффициент полезного действия. Эффективность работы гребного винта оценивается величиной его КПД, т. е. отношения полезно используемой мощности к затрачиваемой мощности двигателя. Полезная мощность или ежесекундное количество работы, используемой непосредственно для движения судна вперед, равно произведению сопротивления воды R движению судна на его скорость V (Nп=RV кгсм/с). Мощность, затрачиваемую на вращение гребного винта, можно выразить в виде зависимости NЗ от крутящего момента М и частоты вращения n NЗ =2π*n*M кгсм/с. Следовательно, КПД можно вычислить следующим образом: η = R*V. 2π*n*M Однако следует еще учесть взаимовлияние корпуса и винта. При работе гребной винт захватывает и отбрасывает в корму значительные массы воды, вследствие чего скорость потока, обтекающего кормовую часть корпуса повышается, а давление падает. Этому сопутствует явление засасывания, т. е. появление дополнительной силы сопротивления воды движению судна по сравнению с тем, которое оно испытывает при буксировке. Следовательно, винт должен развивать упор, превышающий сопротивление корпуса на некоторую величину Pe=R/(1-t) кг. Здесь t - коэффициент засасывания, величина которого зависит от скорости движения судна и обводов корпуса в районе расположения винта. На глиссирующих катерах и мотолодках, на которых винт расположен под сравнительно плоским днищем и не имеет перед собой ахтерштевня, при скоростях свыше 30 км/ч t=0.02÷0.03. На тихоходных (10 - 25 км/ч) лодках и катерах, на которых гребной винт установлен за ахтерштевнем, t = 0,06÷0,15. В свою очередь и корпус судна, образуя попутный поток, уменьшает скорость потока воды, натекающей на гребной винт. Это учитывает коэффициент попутного потока w: va=V(1-w) м/с. Значения w нетрудно определить по данным, приведенным выше. Таким образом, полезная мощность с учетом взаимовлияния корпуса и винта равна а общий пропульсивный КПД комплекса судно-двигатель-гребной винт вычисляется по формуле:
Здесь ηp - КПД винта; ηk - коэффициент влияния корпуса; ηM - КПД валопровода и реверс-редукторной передачи. Максимальная величина КПД гребного винта может достигать 70-80%, однако на практике довольно трудно выбрать оптимальные величины основных параметров, от которых зависит КПД: диаметра и частоты вращения. Поэтому на малых судах КПД реальных винтов может оказаться много ниже, составлять всего 45%. Максимальной эффективности гребной винт достигает при относительном скольжении 10-30%. При увеличении скольжения КПД быстро падает; при работе винта в швартовном режиме он становится равным нулю. Подобным же образом КПД уменьшается до нуля, когда вследствие больших оборотов при малом шаге упор винта равен нулю. Коэффициент влияния корпуса нередко оказывается больше единицы (1.1-1.15), а потери в валопроводе оцениваются величиной ηM=0.9÷0.95. Если во время швартовых испытаний при каком-то значении мощности, подводимой к винту, разрубить швартовый конец, то судно начнет двигаться сначала ускоренно, а затем при достижении равенства между упором винта и сопротивлением корпуса, равномерно. При начале движения судна упор винта, достигнутый при швартовых испытаниях, не останется постоянным, а будет снижаться, причем снижаться нелинейно. Это объясняется тем, что при движении судна поток воды будет влиять на поверхности разряжения лопастей винта, уменьшая разницу давлений между поверхностью нагнетания и поверхностью разряжения. Тогда можно записать, что при скорости судна отличной от нуля Pe = A1Ne – A11Ne2 – A12NeV – A122NeV2 (71) При различной степени загрузки ГД, графики располагаемой тяги имеют вид:(см. рис. 5.11)
Рис. 5.11. Располагаемая тяга судов типа «Атлантик» Тяга нового судна определяется по зависимости:
РРН = А1 · Ne - А11 · Ne2 - A12 · Ne · V - А122 · Ne ∙ V2 - A2 · V - A22 ∙ V2 (1.70) где РРН – тяга нового судна в кН; Аi – коэффициенты в зависимости от типа судна (Таблица 1.4); Ne – мощность, пошедшая на винт, кВт; V – скорость судна, узл. Таблица 1.4
NeГД – размерная мощность, развиваемая главным двигателем (ГД) кВт; NВГ – мощность, отбираемая валогенератором, в кВА, ηВГ – КПД валогенератора.
NeГД НОМ – номинальная мощность ГД в зависимости от типа судна, кВт.
Фактическая тяга судна определяется по зависимости:
РРФ = РРН - Δ РР (1.73) где РРФ – фактическая тяга траулера в кН, РРН – тяга нового судна в кН, ΔРР – потеря тяги, в кН. ΔРР = Во + В1∙V, (1.74) где Вi – коэффициенты; V – скорость судна, узл.
В1 – коэффициент потери свободного хода; ΔРРСХ – определяется по уравнению (1.70), для чего надо рассчитать Ne (по (1.71) и (1.72)) и взять из условия задачи VСХ. Скорость свободного хода, то есть максимальная скорость, которую развмвает судно без трала, у испытываемого судна будет ниже чем у нового. Очевидно, что при расчете ΔРРСХ – по формуле (1), мы получим число больше ноля. То есть у нового судна на такой скорости еще должна была остаться тяга. Это значение и есть поткря тяги на свободном ходу. Во = ΔРР МДК (1.76) где ΔРР МДК – потеря тяги судна из-за износа машино-движительного комплекса, кН; ΔРР МДК определяется из опыта проводимого на нулевом упоре винта. ΔРР МДК = ΔРР МДК =А1 (∆Ne) - A11 (∆Ne) 2 (1.77) где A1 и A11 – коэффициенты уравнения тяги судов, (см. табл. 1.4) ∆Ne = NeИЗМ – Ne ТР, (1.78) NeИЗМ – мощность, пошедшая на винт, измеренная во время работы ГД на винт при нулевом упоре (рассчитывается по (1.71) и (1.72)). NeТР – мощность, теоретически необходимая для вращения винта при нулевом упоре. NeТР. = (2∙πρ∙К2∙nС3∙D5)∙10-3 + (1 - ηВП) ∙ NeГД НОМ (1.79) где ρ – плотность морской воды, кг/м3, К2 – гидродинамический коэффициент момента и мощности винта (для свободных винтов К2 = 0,005, для винтов в насадках К2 = 0,007 при нулевом упоре), nС – частота вращения винта в с-1, D – диаметр винта, м, ηВП – КПД валопровода, NeТР – мощность, потребная для вращения гребного вала и винта при нулевом упоре, определенная теоретическим расчетом, кВт.
Таблица 1.5. Значения частоты вращения и диаметров винтов по типам судов
от косвенных характеристик по типам судов
Таблица 1.7.Сведения о ГД по типам судов
Вопросы для самоконтроля
Раздел 2. Механика гибкой нити.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-21; просмотров: 851; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.170 (0.01 с.) |


 кгсм/с,
кгсм/с,

 (1.71)
(1.71) (1.72)
(1.72) ГД – относительная мощность, развиваемая ГД, в %, если взята в квадратные скобки, то это допускаемая относительная мощность ГД;
ГД – относительная мощность, развиваемая ГД, в %, если взята в квадратные скобки, то это допускаемая относительная мощность ГД; (1.75)
(1.75) Таблица 1.6.Коэффициенты уравнения относительной мощности
Таблица 1.6.Коэффициенты уравнения относительной мощности


