
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Уявлення про адаптивні системиСодержание книги
Поиск на нашем сайте
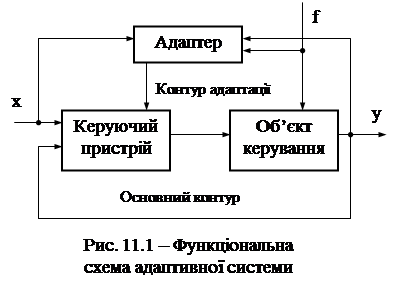
Під час проектування автоматичних систем розрахунок їх параметрів виконують за припущеннями, що статичні та динамічні характеристики об’єкта керування й усіх елементів системи відомі й не змінюються протягом експлуатації та при змінюванні зовнішніх умов. Однак характеристики об’єкта і деяких елементів системи бувають відомі лише приблизно, змінюються через фізичне старіння і, крім того, залежать від зовнішніх умов. Завдяки запасам стійкості система керування буде задовільно працювати й у тому разі, коли практичні характеристики об’єкта трохи відрізняються від розрахункових. Однак у деяких випадках діапазон змінювання статичних і динамічних характеристик настільки великий, що керування об’єктом за допомогою найпростішої системи з постійними параметрами виявляється або незадовільним, або зовсім неможливим (утрата стійкості). У таких випадках можна застосувати систему керування зі змінними властивостями. Процес змінювання властивостей системи, що дозволяє їй досягнути найкращого або, у крайньому разі, задовільного функціонування за умов, що змінюються, називається адаптацією. Системи, що здійснюють процес адаптації, називаються адаптивними. Отже, адаптивна САК – це система, яка здатна у процесі виконання основної задачі керування за рахунок змінювання параметрів і структури регулятора поповнювати нестачу інформації про об’єкт керування і діючи на нього зовнішні збурення і тим самим поліпшувати якість свого функціонування. Пристрій, що реалізує алгоритм адаптації, називається адаптером. Особливість структури адаптивних системи полягає у тому, що вони мають додатковий контур – контур адаптації (рис. 11.1), призначений для перероблення інформації про умови роботи, що змінюються, і подальшого впливу на регулятор основного контуру керування. Адаптер у загальному випадку дістає інформацію про вхідну дію х, збурення f, вихідну величину у і діє на керуючий пристрій основного контуру. Отже, для контуру адаптації Слід зазначити, що адаптивні системи давно існують у природі. Властивість адаптації чітко виявляється, наприклад, у тому, що живі організми здатні утримувати свої координати (наприклад, температуру) в припустимих фізіологічних межах при значних змінах умов, у яких існує організм.
Характерною ознакою адаптивних систем є відсутність повної апріорної (такої, що відома наперед) інформації про об’єкт керування, зовнішні збурення і граничні умови, тобто адаптивній системі притаманна невизначеність. Функціонування системи спрямоване на розкриття цієї невизначеності, тобто знаходження такого стану, при якому задовольняється певний критерій. Розкриття невизначеності адаптивних систем забезпечується завдяки: - надмірності (складності) системи, яка виявляється у багатоступеневості, багатоконтурності й т.д.; - логічності її дії, подібно до логічного мислення людини; - прогнозуванню стану системи і аналізу інформації, що накопичується, з метою самонавчання. Оптимальне функціонування системи може розраховуватись на підставі аналізу інформації про її стан. Такі системи називаються аналітичними. Якщо оптимальний режим роботи визначається у результаті пошуку умов екстремуму критерію ефективності, то системи називаються пошуковими. У цьому випадку система ніби ставить серії експериментів і отримує з них дані, необхідні для поліпшення своєї якості. Змінювання стану системи можна здійснювати за рахунок зміни керуючих впливів, параметрів настроювання і структури системи. Ці зміни називаються контрольованими. Залежно від обсягу цих змін адаптивні системи розділяються на: - екстремальні, в яких можна здійснювати змінювання лише керуючих впливів; - самоналагоджувані, в яких, крім того, змінюються параметри системи; - самоорганізовні, в яких, крім керуючих впливів і параметрів, змінюється ще й структура системи; - навчанні, в яких до того ж, може змінюватись алгоритм роботи, а у разі самонавчання – і критерій ефективності. За способом здійснювання контрольованих змін адаптивні системи розділяються на: - пасивні, в яких зміни здійснюються за наперед розробленою програмою, наприклад, оброблення початкової інформації (висота, швидкість, атмосферні умови та ін.) у системі керування автопілотом; - активні, в яких контрольовані зміни наперед не визначені, а диктуються ситуацією, що склалася. Зазначимо також, що адаптивні системи можуть працювати за замкнутим і розімкнутим циклами: у першому випадку виконується аналіз контрольованих змін, у другому – ні.
Природно, що найдосконалішими є аналітичні активні замкнуті навчанні системи.
|
||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 175; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.165.196 (0.009 с.) |

 об’єктом керування є вся основна САК.
об’єктом керування є вся основна САК.


