
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динаміка дискретних екстремальних системСодержание книги
Поиск на нашем сайте
До цього типу належать крокові й кроково-імпульсні екстремальні системи. У останньому разі виконавчий механізм рухається не безперервно, а імпульсно, причому період слідування імпульсів Т0 звичайно набагато більший за тривалість імпульсу t.
- об’єкт керування (ОК)
- виконавчий механізм (ВМ)
- екстремальний регулятор (ЕР)
Якщо v0=const і t=const, то величина кроку при будь-якому n є постійною. Характер руху кроково-імпульсної системи можна визначити методом фазової площини у координатах “вихідна величина І – її перша різниця DІ ”. Рівняння фазової траєкторії І = f(DІ) або, з урахуванням (11.36), х = f(Dх) можна визначити за допомогою z-перетворення.
У нашому випадку передавальна функція лінійної частини дорівнює:
Тоді імпульсна перехідна функція матиме вигляд (табл. 2.1):
Дискретна передавальна функція імпульсного фільтра, що розглядається, буде (табл. 8.1):
З виходу релейного елемента знімається постійний сигнал
Тоді z-перетворення вихідного сигналу х з урахуванням коефіцієнта передачі реального імпульсного елемента ki=gТ0, де g=t/Т0 – відносна тривалість імпульсів, буде:
Розкладемо (11.44) на прості дроби і позначимо: kik1k3v0=k,
З урахуванням властивості лінійності z-перетворення за допомогою оберненого z-перетворення отримаємо:
Перша різниця Dх матиме вигляд:
Звідси:
Підставимо останній вираз до (11.46) і отримаємо рівняння фазової траєкторії х = f(Dx):
(11.49) де с – стала, що враховує ненульові початкові умови х=х0, Dх=Dх0. Тоді
Зазначимо, що при v<0 коефіцієнт k буде від’ємним, отже, знаки перед k у виразах (11.49) і (11.50) зміняться на протилежні. Для знаходження рівняння лінії перемикання, на якій відбувається змінювання знака величини v, використаємо рівняння регулятора (11.38). Урахуємо, що
З (11.38) видно, що змінювання знака v0 має місце тільки при DІ+D = 0, тобто DІ = -D. Тоді з (11.51) отримаємо рівняння лінії перемикання на різницевій фазовій площині:
Як і у разі безперервних екстремальних систем, у дискретних системах, що розраховані за допомогою різницевої фазової площини, важко встановити зв’язок між параметрами системи та її якістю. Тому для отримання заданих показників якості доводиться декілька разів виконувати розрахунки, змінюючи параметри екстремальної системи. У закінченні зазначимо, що інерційність, що розташована до екстремального об’єкта (рис. 11.11, б), сповільнює рух системи до екстремальної точки, а інерційність, що розташована після об’єкта (рис. 11.11, в), сповільнює час вимірювання екстремуму, а отже, і визначення його положення. Наведені вище аналітичні розрахунки СЕК базуються на достатньо повній інформації про об’єкт. Оскільки звичайно ця інформація є лише приблизною, остаточний висновок про доцільність застосування СЕК можна зробити лише після випробувань системи за промислових умов.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 163; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.116.37.200 (0.005 с.) |

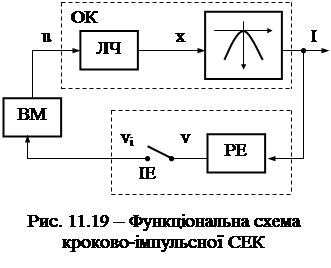 Розглянемо кроково-імпульсну систему (рис. 11.19). Рівняння ланок системи мають вигляд:
Розглянемо кроково-імпульсну систему (рис. 11.19). Рівняння ланок системи мають вигляд: (11.35)
(11.35) (11.36)
(11.36)
 (11.37)
(11.37) (11.38)
(11.38) (11.39)
(11.39) (11.40)
(11.40) (11.41)
(11.41) (11.42)
(11.42) , z-перетворення якого за умови
, z-перетворення якого за умови  має вигляд:
має вигляд: (11.43)
(11.43) (11.44)
(11.44) . Тоді отримаємо:
. Тоді отримаємо: (11.45)
(11.45) (11.46)
(11.46) (11.47)
(11.47) або з урахуванням, що
або з урахуванням, що  , отримуємо:
, отримуємо: (11.48)
(11.48)
 (11.50)
(11.50) або
або (11.51)
(11.51) (11.52)
(11.52)


