
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Системи екстремального керування крокового типуСодержание книги
Поиск на нашем сайте
Величина кроку квантування за часом t обмежується тим, що при великому кроку у системі можуть з’явитися помилки через наявність дрейфу екстремальної характеристики. З іншого боку, при занадто малому кроці t на правільність роботи системи можуть впливати високочастотні перешкоди. У кроковій системі пошук екстремуму здійснюється дослідженням впливу керуючої дії u на критерій ефективності І. Разом з тим, визначення положення системи відносно екстремальної точки можна здійснити і за допомогою спеціального пошукового сигналу.
Функціональна схема системи для даного випадку наведена на рис. 11.7. Подамо на вхід системи за допомогою генератора пошукових сигналів (ГПС) синусоїдальний сигнал un з невеликою амплітудою unmax і постійною частотою w0. Якщо система знаходиться на лівій частині екстремальної характеристики (рис. 11.8), то фази коливань, що викликані пошуковим сигналом, на вході й виході об’єкта (1 і 1¢) співпадають, а якщо на правій – то ці коливання (3 і 3¢) знаходяться у протифазі. В екстремальній точці маємо на виході об’єкта сигнал (2¢) подвійної частоти.
Якщо на виході об’єкта поставити фільтр, що перепускає тільки частоту пошукового сигналу un, то, порівнюючи за допомогою фазового детектора (ФД) фазу вихідної гармоніки з вхідною, можна дізнатися, на якій частині характеристики працює система і, відповідно, в якому напрямку необхідно змінювати керуючу дію u, щоб досягти екстремальної точки. Реверс виконавчого механізму (ВМ) здійснюється при зміні фази вихідних коливань за допомогою перемикаючого пристрою (ПерП). Якщо як перемикаючий пристрій використовувати трипозиційне реле, то наявність зони нечутливості дозволяє при достатньо малих відхиленнях системи від точки екстремуму не вмикати виконавчий механізм. Ця обставина використовується при застосуванні низькочастотного пошукового сигналу, для якого практично неможливо побудувати ефективні фільтри. Зазначимо, що амплітуда коливань вихідного пошукового сигналу пропорційна величині похідної Під час розглядання принципу дії даної системи не враховували інерційність об’єкта керування, яка обумовлює зсув фаз між вхідним і вихідним пошуковим сигналом (якщо цей зсув складатиме 180°, система втратить стійкість). Зменшити вплив цього явища можна або за рахунок доповнення системи фазозсувальним пристроєм, або за рахунок зменшення частоти пошукового сигналу. Зазначимо також, що для ефективної фільтрації частота пошукового сигналу має бути значно вищою за частоту вхідних сигналів. Системи з пошуковим сигналом мають велику завадостійкість порівняно із системами, що вимірюють похідну, оскільки не потребують диференціальних ланок, які збільшують вплив перешкод. Крім того, такі системи можуть застосовуватись при різкому дрейфі екстремальної характеристики, оскільки при цьому в них, на відміну від систем крокового типу, не з’являються помилкові сигнали.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 183; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.250.241 (0.009 с.) |

 Принцип дії систем цього типу оснований на тому, що через певні інтервали часу, що називаються кроками, вимірюються значення екстремального показника. Потім здійснюється їх порівняння на початку і наприкінці кожного кроку. Якщо протягом розглядуваного періоду екстремальний показник зменшується, то у системі здійснюється реверс керуючої дії. У протилежному випадку реверс не відбувається. Функціональна схема крокової системи наведена на рис. 11.6. У даній схемі величина, пропорційна критерію І, подається на вхід блоку усереднення (БУ), який видає середнє за крок значення Ісер.і. У кінці кожного кроку це значення подається на пристрій порівняння (ПП) і блок пам’яті (БП). З виходу ПП знімається різниця DІ = Ісер.і - Ісер.і-1. При DІ>0 напрямок обертання виконавчого механізму (ВМ) не змінюється. При DІ<0 перемикаючий пристрій (ПерП) подає команду на реверс ВМ. Для керування виконавчим механізмом застосовується елемент з релейною характеристикою. Крок квантування за часом t визначається тактовим генератором (ГТ). За умови достатньо великого кроку змінювання керуючої дії Du вимірювання критерію ефективності можна здійснювати дискретно – на початку і наприкінці даного кроку, тоді DІn=In–In-1. При цьому забезпечується достатня завадостійкість системи за відсутності блоку усереднення.
Принцип дії систем цього типу оснований на тому, що через певні інтервали часу, що називаються кроками, вимірюються значення екстремального показника. Потім здійснюється їх порівняння на початку і наприкінці кожного кроку. Якщо протягом розглядуваного періоду екстремальний показник зменшується, то у системі здійснюється реверс керуючої дії. У протилежному випадку реверс не відбувається. Функціональна схема крокової системи наведена на рис. 11.6. У даній схемі величина, пропорційна критерію І, подається на вхід блоку усереднення (БУ), який видає середнє за крок значення Ісер.і. У кінці кожного кроку це значення подається на пристрій порівняння (ПП) і блок пам’яті (БП). З виходу ПП знімається різниця DІ = Ісер.і - Ісер.і-1. При DІ>0 напрямок обертання виконавчого механізму (ВМ) не змінюється. При DІ<0 перемикаючий пристрій (ПерП) подає команду на реверс ВМ. Для керування виконавчим механізмом застосовується елемент з релейною характеристикою. Крок квантування за часом t визначається тактовим генератором (ГТ). За умови достатньо великого кроку змінювання керуючої дії Du вимірювання критерію ефективності можна здійснювати дискретно – на початку і наприкінці даного кроку, тоді DІn=In–In-1. При цьому забезпечується достатня завадостійкість системи за відсутності блоку усереднення. Системи екстремального керування із зовнішнім генератором пошукових сигналів
Системи екстремального керування із зовнішнім генератором пошукових сигналів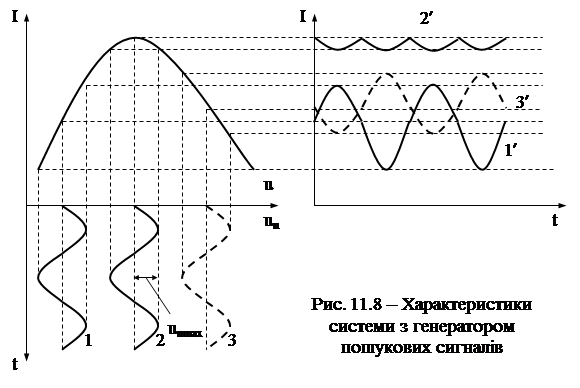
 , що дозволяє побудувати екстремальні системи з пропорційним керуванням.
, що дозволяє побудувати екстремальні системи з пропорційним керуванням.


