Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Суть импульсного (амплитудного) метода дальнометрии.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Импульсный (амплитудный) метод дальнометрии. Дальность до цели
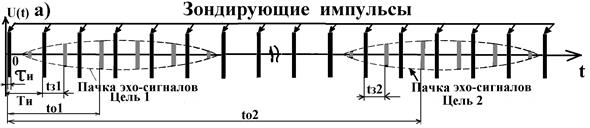
Рисунок 1.1. Пояснение принципа измерения дальности при использовании индикатора с амплитудной отметкой На горизонтально - отклоняющие пластины электронно-лучевой трубки (ЭЛТ) подаётся пилообразное напряжение. Это напряжение перемещает светящееся пятно по экрану индикатора с постоянной скоростью V р, зависящей от скорости нарастания амплитуды приложенного к пластинам напряжения. Пятно при своём движении слева направо, от одного края экрана к другому краю экрана трубки, прочерчивает яркую линию (след). Эта линия называется линией развёртки. Начало линии развёртки совпадает с началом излучения зондирующего импульса. Длина линии развёртки L р выбирается так, чтобы она занимала всю рабочую ширину экрана индикатора. Типичные значения линии развёртки лежат в интервале 150….600мм. Видеосигналы с выхода порогового устройства приёмника подаются на вертикально - отклоняющие пластины ЭЛТ (рис.1.1) и производят отклонение пятна по вертикали в виде кратковременных выбросов. Вследствие перемещения (вращения) диаграммы направленности антенны (рис.1.1, б), эхо-сигнал состоит из ограниченного числа радиоимпульсов, образующих пачку (рис.1.1, а). Поэтому описанный процесс появления выбросов от зондирующих и эхо-сигналов периодически повторяется с частотой Расстояние L (рис.1.1) относительно начала развёртки, на которое сместится пятно на экране ЭЛТ к моменту прихода эхо-сигнала, зависит от времени запаздывания эхо-сигнала и скорости движения пятна по экрану трубки.
где T р – длительность прямого хода развёртки; R ц – расстояние до цели подлежащая измерению. Поэтому выражение для L можно записать в следующем виде:
где Дшк – расстояние, соответствующее всей длине шкалы- линии развёртки. Д шк =R max при Т р =Т и.
где m – масштаб, в котором отображается на линии развёртки расстояние
Полученное выражение означает, что расстояние L (рис.1.1) между передним фронтом зондирующего сигнала и передним фронтом эхо-сигнала характеризует дальность до цели Rц, и развёртку можно проградуировать непосредственно в единицах дальности.
Рисунок 1.2. Импульсный метод дальнометрии: а - последовательность зондирующих импульсов и отражённых пачек эхо-сигналов от целей 1и 2 находящихся на разных азимутах; момент времени t=0 соответствует совпадению оси ДН вращающейся антенны с направлением на север (С); б- последовательный круговой обзор в азимутальной плоскости Например, пусть T р = 360 мкс, тогда расстояние, соответствующее всей длине линии развёртки:
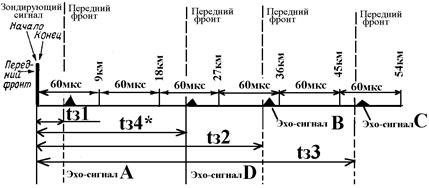
Всю линию развертки можно разделить на равные отрезки и обозначить их одинаковыми метками в точках деления. Линия на рисунке 2.8 разделена на отрезки, соответствующие 9км, то есть каждый отрезок пропорционален 60мкс. Тогда: - положение отметки от первой цели А соответствует дальности 4,5км (t з1 =30мкс); - положение отметки от второй цели В соответствует дальности 35км (t з2»233,3мкс); - положение отметки от третьей цели С соответствует дальности 47,5 км (t з3»316,6 мкс).
Рисунок 1.3. Градуировка линии развёртки в километрах Для целей 1,2, 3 (рис.1.3) t з < T и, поэтому измеренные значения соответствуют реальному положению целей в пространстве. В случае, если t з > T и, измеренная дальность до цели не будет соответствовать реальному местоположению цели. Допустим, что цель D удалена от РЛС на расстояние, равное 76,5км. Тогда время запаздывания эхо-сигнала t з4, отражённого от цели D, равно 510мкс, в то время, как Tи =360мкс. В этом случае отметка от четвёртой цели D будет сформирована в точке линии развёртки, соответствующей дальности 22,5км (t з4 *=510-360=150мкс), что неверно. Импульсный (амплитудный) метод дальнометрии получил широкое распространение благодаря следующим своим достоинствам: - возможно одновременное измерение дальности нескольких целей, находящихся на одном угловом направлении; - вследствие чередования излучения и приёма наиболее просто решается проблема отделения слабых отражённых сигналов от мощных зондирующих; - можно использовать одну и ту же антенну, коммутируемую на приём и передачу; - сравнительно просто реализуются оптимальные условия приёма, особенно для коротких радиоимпульсов без внутренней модуляции.
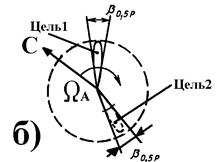
ВОПРОС №11 Суть амплитудных методов определения угловых координат(метод минимума и метод максимума) В основу амплитудных методов определения угловых координат положена способность антенных устройств концентрировать электромагнитную энергию в пределах определённого угла (направленное действие антенны). Измеряемые угловые координаты закодированы в изменении интенсивности эхо-сигналов, зависящей от рассогласования между направлением прихода отраженного сигнала и углом поворота ДН приёмной антенны. 1.2. 1 Метод максимума Простейшая форма диаграммы направленности (ДН) антенны для определения угловой координаты имеет однолепестковую форму. В случае перемещения антенны, например, вращения её в азимутальной плоскости с угловой скоростью ΩА (рис.1.1, б), эхо-сигнал на её входе будет отсутствовать до тех пор, пока цель не попадёт в раствор ДН. По мере приближения оси ДН антенны к направлению на цель интенсивность эхо-сигнала будет увеличиваться (рис.1.1, а). Огибающая пачки эхо-сигналов цели имеют форму ДН антенны. Максимальная интенсивность эхо-сигнала будет наблюдаться при совпадении оси ДН антенны с направлением на цель (рис.1.1). На рисунке 1.1 это момент времени to1 и to2. Чем больше смещена цель относительно начального направления в сторону вращения антенны, тем позднее формируется пачка эхо-сигналов to2> to1. То есть, в общем случае:
Рисунок 1.4. Метод максимума Метод максимума получил широкое распространение благодаря следующим своим достоинствам: - простота технической реализации; - получение наибольшей (при прочих равных условиях) амплитуды принимаемого сигнала в момент совпадения оси ДН с направлением на цель. Вследствие этого искажающее влияние шумов на результат измерения будет наименьшим. К недостаткам метода максимума можно отнести: - относительно низкую точность измерения угловой координаты. Это обусловлено тем, что в методе максимума для поиска угла используется центральная часть лепестка СD (рис.1.4), где интенсивность эхо-сигнала, приходящаяся на каждый градус поворота антенны, изменяется незначительно; - неопределённость направления ухода подвижной цели в случае отклонения цели от оси ДН и тем самым затруднение её сопровождения; - требование многократного облучения цели для измерения угловой координаты обусловленное одноканальным методом измерения угловых координат. 1.2.2. Метод минимума
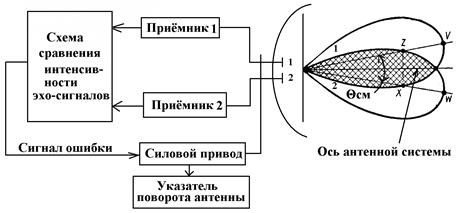
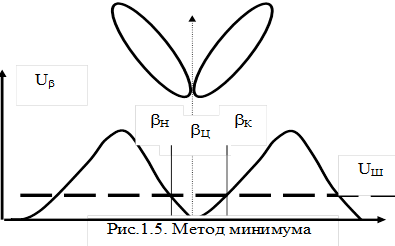
Метод предусматривает использование антенны с характеристикой направленности F(b), имеющий глубокий провал в главном направлении приема b0 и пеленгационную характеристику UС(q) направлении приема b0 (рис.1.5). Пеленгационная характеристика совпадает с характеристикой направленности антенной системы FР(q) и обладает высокой крутизной в окрестности b0. Изменяя угловое положение антенной системы, определяет направление на источник излучения (отражения) по минимуму сигнала. Вследствие высокой крутизны пеленгационной характеристики данный метод обеспечивает высокую точность измерения пеленга, значения которого является среднеарифметическим Однако в районе минимума амплитуда полезного сигнала весьма мала, что в ряде случаев может привести к маскировке шумами сигнала и как следствие к росту ошибок измерений. Другим недостатком является то, что при определении пеленга сигнал на выходе приемника отсутствует, либо очень мал. Последнее обстоятельство затрудняет определение дальности до объекта. Данный метод нашел применение в радионавигации и радиотехнической разведке. ВОПРОС №12 Суть метода равносигнального направления. (Метод моноимпульсной пеленгации) Получившие широкое распространение одноканальные методы пеленгации, в частности метод максимума, имеют недостатки, которые могут быть устранены при переходе к многоканальным методам. Многоканальные методы относятся к классу моноимпульсных методов пеленгации. В радиолокации широко применяется двухканальная амплитудная система пеленгации. На приёмные каналы поступают колебания от облучателей, сдвинутых из фокуса зеркал антенны. Двум каналам соответствуют ДН, смещённые на некоторый угол Θ см. (рис.1.6). Этот метод позволяет определить отклонение цели от некоторого опорного (равносигнального) направления, используя боковые стороны лепестка ОC и ОD (рис.1.5), где интенсивность эхо-сигнала, приходящаяся на каждый градус поворота антенны, изменяется быстро. Двухлепестковая ДН, формируемая двумя облучателями антенны, имеет вид, представленный на рисунке 1.7. Ось, проведённая через точки пересечения перекрывающихся ДН приёмных каналов, принято называть равносигнальным направлением или главным направлением приёма. Метод равносигнального направления основан на том, что интенсивности эхо-сигналов в приёмных каналах равны между собой только в том случае, когда цель находится на равносигнальном направлении (рис.1.7, б). Если цель первоначально находится на направлении OV, то интенсивность эхо-сигнала, принятого в первом приёмном канале, отличается от интенсивности эхо-сигнала, принятого во втором на величину:OV-OZ=D ¹0, D >0.
Рисунок 1.6. Измеритель угловой координаты цели методом равносигнального направления В случае нахождения цели на направлении OW: OX- OW = D ¹0, D < 0. Сигнал ошибки D подаётся на устройство управления вращением антенной системы (АС). АС вращается по часовой стрелке (рис.1.7,а ) или против ( рис.1.7, в ) пока интенсивности э хо-сигналов в каналах приёма не станут равными, и сигнал ошибки не примет значение, равное нулю (рис.1.7,б ). В этом случае угловое положение АС соответствует направлению на цель и может быть определено по показаниям указателя поворота антенной системы. К достоинствам метода равносигнального направления относятся: - достаточно точное измерение угловой координаты; - достаточно большая (при прочих равных условиях) амплитуда принимаемого сигнала в момент совпадения равносигнального направления ДН антенной системы с направлением на цель; - возможность измерения угловой координаты при однократном облучении цели; - нечувствительность к флюктуациям интенсивности эхо-сигналов обусловленная сравнением сигналов в каналах приёма в один и тот же момент времени; - полная определённость в определении направления отклонения цели от оси АС, что облегчает задачи сопровождения цели. - К недостаткам метода равносигнального направления можно отнести: - - уменьшение дальности действия, так как в момент пеленга максимум ДН отклонён от цели; - - более сложное антенное устройство.
Рис.1.7. Метод равносигнального направления: а) цель на оси ДН второго приёмного канала; азимут цели,b цели= 900; угол поворота АС в азимутальной плоскости b АС=800;сигнал ошибки D < 0, АС вращается по часовой стрелке; б) цель находится на равносигнальном направлении; b цели= b АС =900;сигнал ошибки D = 0; в) цель на оси ДН второго приёмного канала; азимут цели,b цели= 900; угол поворота АС в азимутальной плоскости b АС= 1000; сигнал ошибки D > 0; АС вращается против часовой стрелки ВОПРОС №13
|
||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 959; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.15.49.90 (0.009 с.) |


 определяется путём измерения времени запаздывания отражённого импульса относительно зондирующего. Такое измерение может быть осуществлено на экране индикатора с амплитудной отметкой (рис.1.1).
определяется путём измерения времени запаздывания отражённого импульса относительно зондирующего. Такое измерение может быть осуществлено на экране индикатора с амплитудной отметкой (рис.1.1).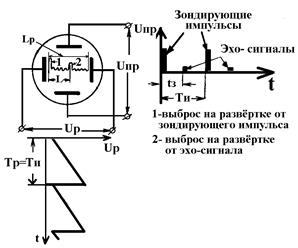
 . Благодаря достаточно большому по величине значению частоты повторения, послесвечению люминофора ИКО и инерционности зрения изображение на экране индикатора выглядит слитно.
. Благодаря достаточно большому по величине значению частоты повторения, послесвечению люминофора ИКО и инерционности зрения изображение на экране индикатора выглядит слитно.
 ;
; ;
;  ;
; 

 ;
;
 .
.
 - время запаздывания максимума огибающей пачки эхо-сигналов относительно направления на север. Измерение угловой координаты β ц сводится к определению момента пересечения максимумом ДН направления на цель и считыванию углового положения антенны на устройстве «Указатель поворота антенны». Это устройство обнуляется каждый раз, когда ось ДН антенны совпадает с направлением на север. Таким образом,
- время запаздывания максимума огибающей пачки эхо-сигналов относительно направления на север. Измерение угловой координаты β ц сводится к определению момента пересечения максимумом ДН направления на цель и считыванию углового положения антенны на устройстве «Указатель поворота антенны». Это устройство обнуляется каждый раз, когда ось ДН антенны совпадает с направлением на север. Таким образом,  . Точность определения момента t o зависит от способности оператора улавливать малые изменения интенсивности при небольшом рассогласовании оси ДН и направления на цель. Чем уже ДН антенны, тем теоретически точнее можно определить угловое положение цели.
. Точность определения момента t o зависит от способности оператора улавливать малые изменения интенсивности при небольшом рассогласовании оси ДН и направления на цель. Чем уже ДН антенны, тем теоретически точнее можно определить угловое положение цели.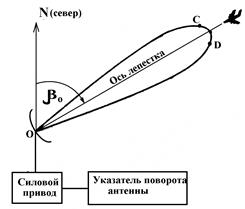
 .
.