
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение радиолокации, угла места и азимута целиСодержание книги
Поиск на нашем сайте
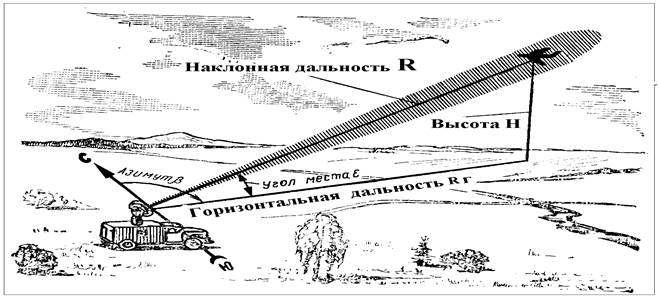
ВОПРОС №1 Определение радиолокации, угла места и азимута цели Радиолокация - наука о методах и средствах получения сведений об объектах за счет приема и анализа радиоволн, отраженных или излученных этими объектами. Получаемые сведения составляют радиолокационную информацию. Объекты, радиолокации называют радиолокационными целями. Азимутом bц объекта - называется отсчитываемый по часовой стрелке угол между направлением на север и проекцией на горизонтальную плоскость прямой, проходящей через начальную точку и объект. Угол между этой прямой и её проекцией называют углом места цели eц.
ВОПРОС №2 Физические явления, лежащие в основе радиолокационных методов обнаружения, определения координат и скорости перемещения целей в пространстве. Задачу наблюдения и навигации с использованием радиоволн возможно решать благодаря их распространению в однородной среде с постоянной скоростью с (в вакууме с = 3·108 м/с), что позволяет измерять проходимые ими расстояния. Изменение длины траектории распространения радиоволн из-за движения объекта приводит в силу эффекта Доплера к изменению частоты сигнала. По изменению частоты можно оценить радиальную скорость перемещения или выделить сигналы от движущихся целей на фоне мешающих отражений от неподвижных объектов. Трансформация сигналов при отражении от объектов зависит от физических свойств материалов, конфигурации и параметров движения объектов. Эта зависимость обусловливает возможность распознавания радиолокационных целей. В радионавигации распознавание осуществляется проще, обычно путём передачи индивидуальных кодов распознаваемыми объектами. Координаты объекта определяют по расположению относительно него ориентиров или других характерных признаков местности. Это осуществляется путем сравнения наблюдаемых с помощью бортовых датчиков (например, бортовых РЛС) параметров, характеризующих местность, над которой движется объект, с хранящимися в памяти системы эталонными параметрами. В радиотехнических обзорно-сравнительных системах наблюдаемыми параметрами являются высоты точек рельефа местности, дальность и угловые координаты радиолокационных ориентиров.
ВОПРОС №3 Задачи, решаемые РЛС. В радиолокационном наблюдении можно условно выделить следующие задачи: - обнаружение целей; - измерение их координат и параметров движения; - разрешение целей; - распознавание и опознавание целей. Обнаружение осуществляется на основании анализа принимаемых колебаний и состоит в принятии решения о наличии или отсутствии цели в просматриваемом элементе пространства. Измерение заключается в получении оценок координат и параметров движения радиолокационных целей. Разрешение - раздельное обнаружение и определение положения в пространстве нескольких объектов с мало различающимися координатами и параметрами движения. Распознавание (классификация) - отнесение объекта к какому-либо из выделенных классов. Разбиение на классы может осуществляться произвольно, например, по назначению: бомбардировщик, истребитель, крылатая ракета. Особое значение имеет определение принадлежности цели к одномуиз классов "свой" и "чужой", то есть так называемое опознавание, обычно считающееся отдельной задачей. ВОПРОС №4 Рис.1.3 Если приёмное и передающее устройства совмещены, то радиосистема (станция) называется однопозиционной. Ее достоинство заключается в возможности использования одной и той же антенны на передачу и на прием. Разнесенные системы являются многопозиционными. В двухпозиционных системах активной локации приёмное и передающее устройства располагаются на расстоянии d друг от друга. Такие системы могут быть наземными, для которых характерно постоянное расстояние между передающим и приемным пунктами рис.1.4.
ВОПРОС №5 ВОПРОС №6 ВОПРОС №7 ВОПРОС №8 ВОПРОС №9 ВОПРОС №10 ВОПРОС №11 Суть амплитудных методов определения угловых координат(метод минимума и метод максимума) В основу амплитудных методов определения угловых координат положена способность антенных устройств концентрировать электромагнитную энергию в пределах определённого угла (направленное действие антенны). Измеряемые угловые координаты закодированы в изменении интенсивности эхо-сигналов, зависящей от рассогласования между направлением прихода отраженного сигнала и углом поворота ДН приёмной антенны. 1.2. 1 Метод максимума Простейшая форма диаграммы направленности (ДН) антенны для определения угловой координаты имеет однолепестковую форму. В случае перемещения антенны, например, вращения её в азимутальной плоскости с угловой скоростью ΩА (рис.1.1, б), эхо-сигнал на её входе будет отсутствовать до тех пор, пока цель не попадёт в раствор ДН. По мере приближения оси ДН антенны к направлению на цель интенсивность эхо-сигнала будет увеличиваться (рис.1.1, а). Огибающая пачки эхо-сигналов цели имеют форму ДН антенны. Максимальная интенсивность эхо-сигнала будет наблюдаться при совпадении оси ДН антенны с направлением на цель (рис.1.1). На рисунке 1.1 это момент времени to1 и to2. Чем больше смещена цель относительно начального направления в сторону вращения антенны, тем позднее формируется пачка эхо-сигналов to2> to1. То есть, в общем случае:
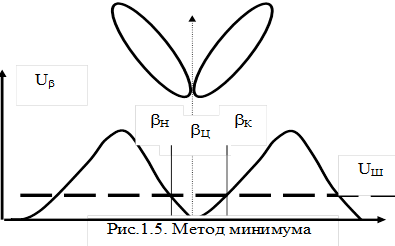
Рисунок 1.4. Метод максимума Метод максимума получил широкое распространение благодаря следующим своим достоинствам: - простота технической реализации; - получение наибольшей (при прочих равных условиях) амплитуды принимаемого сигнала в момент совпадения оси ДН с направлением на цель. Вследствие этого искажающее влияние шумов на результат измерения будет наименьшим. К недостаткам метода максимума можно отнести: - относительно низкую точность измерения угловой координаты. Это обусловлено тем, что в методе максимума для поиска угла используется центральная часть лепестка СD (рис.1.4), где интенсивность эхо-сигнала, приходящаяся на каждый градус поворота антенны, изменяется незначительно; - неопределённость направления ухода подвижной цели в случае отклонения цели от оси ДН и тем самым затруднение её сопровождения; - требование многократного облучения цели для измерения угловой координаты обусловленное одноканальным методом измерения угловых координат. 1.2.2. Метод минимума
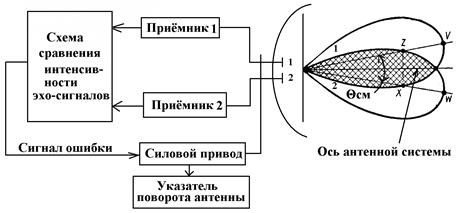
Метод предусматривает использование антенны с характеристикой направленности F(b), имеющий глубокий провал в главном направлении приема b0 и пеленгационную характеристику UС(q) направлении приема b0 (рис.1.5). Пеленгационная характеристика совпадает с характеристикой направленности антенной системы FР(q) и обладает высокой крутизной в окрестности b0. Изменяя угловое положение антенной системы, определяет направление на источник излучения (отражения) по минимуму сигнала. Вследствие высокой крутизны пеленгационной характеристики данный метод обеспечивает высокую точность измерения пеленга, значения которого является среднеарифметическим Однако в районе минимума амплитуда полезного сигнала весьма мала, что в ряде случаев может привести к маскировке шумами сигнала и как следствие к росту ошибок измерений. Другим недостатком является то, что при определении пеленга сигнал на выходе приемника отсутствует, либо очень мал. Последнее обстоятельство затрудняет определение дальности до объекта. Данный метод нашел применение в радионавигации и радиотехнической разведке. ВОПРОС №12 Суть метода равносигнального направления. (Метод моноимпульсной пеленгации) Получившие широкое распространение одноканальные методы пеленгации, в частности метод максимума, имеют недостатки, которые могут быть устранены при переходе к многоканальным методам. Многоканальные методы относятся к классу моноимпульсных методов пеленгации. В радиолокации широко применяется двухканальная амплитудная система пеленгации. На приёмные каналы поступают колебания от облучателей, сдвинутых из фокуса зеркал антенны. Двум каналам соответствуют ДН, смещённые на некоторый угол Θ см. (рис.1.6). Этот метод позволяет определить отклонение цели от некоторого опорного (равносигнального) направления, используя боковые стороны лепестка ОC и ОD (рис.1.5), где интенсивность эхо-сигнала, приходящаяся на каждый градус поворота антенны, изменяется быстро. Двухлепестковая ДН, формируемая двумя облучателями антенны, имеет вид, представленный на рисунке 1.7. Ось, проведённая через точки пересечения перекрывающихся ДН приёмных каналов, принято называть равносигнальным направлением или главным направлением приёма. Метод равносигнального направления основан на том, что интенсивности эхо-сигналов в приёмных каналах равны между собой только в том случае, когда цель находится на равносигнальном направлении (рис.1.7, б). Если цель первоначально находится на направлении OV, то интенсивность эхо-сигнала, принятого в первом приёмном канале, отличается от интенсивности эхо-сигнала, принятого во втором на величину:OV-OZ=D ¹0, D >0.
Рисунок 1.6. Измеритель угловой координаты цели методом равносигнального направления В случае нахождения цели на направлении OW: OX- OW = D ¹0, D < 0. Сигнал ошибки D подаётся на устройство управления вращением антенной системы (АС). АС вращается по часовой стрелке (рис.1.7,а ) или против ( рис.1.7, в ) пока интенсивности э хо-сигналов в каналах приёма не станут равными, и сигнал ошибки не примет значение, равное нулю (рис.1.7,б ). В этом случае угловое положение АС соответствует направлению на цель и может быть определено по показаниям указателя поворота антенной системы. К достоинствам метода равносигнального направления относятся: - достаточно точное измерение угловой координаты; - достаточно большая (при прочих равных условиях) амплитуда принимаемого сигнала в момент совпадения равносигнального направления ДН антенной системы с направлением на цель; - возможность измерения угловой координаты при однократном облучении цели; - нечувствительность к флюктуациям интенсивности эхо-сигналов обусловленная сравнением сигналов в каналах приёма в один и тот же момент времени; - полная определённость в определении направления отклонения цели от оси АС, что облегчает задачи сопровождения цели. - К недостаткам метода равносигнального направления можно отнести: - - уменьшение дальности действия, так как в момент пеленга максимум ДН отклонён от цели; - - более сложное антенное устройство.
Рис.1.7. Метод равносигнального направления: а) цель на оси ДН второго приёмного канала; азимут цели,b цели= 900; угол поворота АС в азимутальной плоскости b АС=800;сигнал ошибки D < 0, АС вращается по часовой стрелке; б) цель находится на равносигнальном направлении; b цели= b АС =900;сигнал ошибки D = 0; в) цель на оси ДН второго приёмного канала; азимут цели,b цели= 900; угол поворота АС в азимутальной плоскости b АС= 1000; сигнал ошибки D > 0; АС вращается против часовой стрелки ВОПРОС №13 ВОПРОС №14 Способы определения высоты полета цели (расчетный и V-луча). 2.1. Определение высоты полета цели расчетным методом
Запишем выражение (2.2) (учитывая, что
Представим (2.2) как:
Используя приближенное разложение квадратного корня в степенной ряд
Упростив выражение, получим:
Учитывая, что радиус земного шара R = 6368 км, находим
Причем все величины должны быть выражены в км. В реальных РЛС расчет высоты производится по следующей зависимости:
где: 2.2. Определение высоты методом V – образного луча.
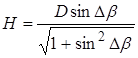
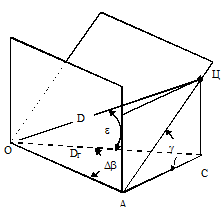
Определение высоты основано на следующем: антенная система вращается таким образом, что цель вначале попадает в зону действия вертикального луча, а затем наклонного. Угол Db рис (1.10) на который поворачивается антенная система от момента облучения цели вертикальным лучам до момента облучения наклонным лучом, зависит от угла места цели, что при известной дальности позволяет определить высоту цели. Таким образом определение высоты сводится к определению наклонной дальности до цели и угла Db. Формула, определяющая зависимость высоты от угла Db и дальности до цели может быть получена при помощи геометрических построений, приведенных на рис.. Заменяя движение лучей относительным движением объекта, обозначим точки пересечения объекта с плоскостями через Б и А. При этом ОБ = ОА = D, ОВ = ОД = DГ. (DГ – горизонтальная дальность до цели).
Из треугольника ОБД получим:
Решая совместно два последних соотношения, получим:
Определение малых высот, связанное с измерением малых углов Db не может быть точным. Для повышения точности измерения данным способом целей летящих на малой высоте ДНА верхних и нижних лучей раздвигаются на угол D (обычно его выбирают равным 100), т.е. вводится дополнительный угол запаздывания второй отметки относительно первой и при расчете высоты вместо измеренного угла Db необходимо подставить угол Db- D. среднеквадратическая ошибка определения высоты данным способом составляет 150 – 300 м в зависимости от пространственного положения цели относительно РЛС. Возможен другой вариант нахождения высоты цели методом V – луча по измеренным значениям наклонной дальности и угла Db. Из рис. 1.10 видно, что
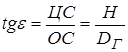
Но т.к. ЦС=АСtgg, а g=450, то Н=ЦС=АС, тогда справедливо равенство:
Подставив (2) в (1) получим: Последнее равенство позволяет рассчитать значение угла места по измеренному углу Db. При этом в соответствии с равенствами (1,2) и (3) высота цели равна:
Поскольку РЛС измеряет наклонную дальность до цели, которая связана с горизонтальной соотношением:
Используя известное тригонометрическое выражение
Подставив (6) в (5), а последнее в (4) получим:
ВОПРОС №15 Вопрос №17 ВОПРОС №18 ВОПРОС №20 ВОПРОС №21 Эффективная площадь рассеяния цели (ЭПР)
где
откуда получаем общее выражение для ЭПР
Плотность потока мощности на расстоянии
Это произведение имеет размерность площади и характеризует, какую часть энергии падающей радиоволны получает цель, потери энергии во вторичном излучателе, направленные свойства вторичного излучения. Тогда, подставляя (1.4), (1.5), (1.6), (1.7) в (1.2), окончательно получим
где Из формулы (1.2), получаем общее выражение для ЭПР:
ВОПРОС №22 ВОПРОС №23 ВОПРОС №24 ВОПРОС №26 источники и классификация помех. Любые посторонние излучения, воздействующие на приемное устройство РТС (выделяющиеся на фоне собственных шумов приемника), создают помехи. По способу создания помехи могут быть активными и пассивными. Активные помехи создаются источниками первичного излучения естественного или искусственного происхождения. Источниками активных помех для РТС могут быть: авиационные станции активных помех, устанавливаемые на борту СВН противника; станции активных помех, размещаемые на земле или устанавливаемые на кораблях; забрасываемые малогабаритные передатчики помех одноразового использования; свои радиоэлектронные средства, в том числе РТС, излучающие электромагнитные колебания в соответствующих частотных диапазонах в пределах радиовидимости; природные (естественные) и индустриальные источники электромагнитных излучений; ядерные взрывы и др. Пассивные помехи создаются за счет переотражения электромагнитной энергии самого РТС объектами естественного или искусственного происхождения. Источниками пассивных помех могут быть: участки земной поверхности; облака гидрометеообразований; облака искусственных металлических (металлизированных) отражателей - диполей, лент, специальных аэрозолей; пылевые облака, крупные скопления птиц, насекомых, турбулентная атмосфера; искусственно ионизированные области и др. По своему происхождению помехи могут быть естественными, взаимными и искусственными (рис. 1). Естественными являются помехи природного происхождения, к которым можно отнести: излучения электромагнитных волн нагретыми объектами; излучение Солнца, Луны, космических объектов и космического пространства; атмосферные и индустриальные помехи; вторичное излучение окружающих объектов; шумы антенны и приемников. Активные помехи, вызываемые влиянием излучений различных радиоэлектронных средств друг на друга, называют взаимными помехами. Наряду с взаимными активными помехами иногда имеют место и взаимные пассивные помехи. Такие помехи наблюдаются в гористой местности и обусловлены переотражениями электромагнитных колебаний, излучаемых другими РТС.
Рис. 1. Классификация помех Искусственные помехи создаются противником преднамеренно с целью нарушения нормальной работы РТС. По характеру воздействия помехи делятся на маскирующие и имитирующие. Маскирующая помеха полностью или частично маскирует полезный сигнал и тем самым исключает или затрудняет его выделение в приемном устройстве РТС. Этот вид помехи наиболее универсален и может использоваться против всех типов радиоэлектронных средств. В качестве маскирующих часто используются шумовые помехи. Их воздействие на РТС эквивалентно увеличению уровня собственных шумов приемника, что приводит к снижению вероятности правильного обнаружения сигнала. Маскирующим эффектом обладают также несинхронные импульсные и многократные ответные импульсные помехи, когда на один зондирующий импульс подавляемого РТС передатчик помехопостановщика формирует серию ответных импульсов, среди которых может находиться сигнал, отраженный от цели (полезный). Имитирующая помеха создает эффект ложных целей, перегружая устройства обработки и затрудняя получение информации об истинных целях. В качестве имитирующих применяются, например, однократные активные импульсные помехи с переменной задержкой момента формирования для имитации движения цели. Имитирующие помехи оказывают существенное влияние на качество работы систем автоматического обнаружения и сопровождения целей. Активные помехи могут дополнительно классифицироваться по следующим признакам: по времени воздействия на подавляемое РТС, по степени концентрации мощности излучения. По времени воздействия на подавляемое РТС помехи подразделяются на импульсные и непрерывные (импульсные помехи, в свою очередь, подразделяются - на ответные и неответные, на синхронные и несинхронные). Ответные помехи создаются за счет переизлучения и тиражирования зондирующих сигналов подавляемого РТС. Средства создания таких помех отличаются большим быстродействием. Ответные помехи применяются, главным образом, для перегрузки устройств обработки эхо-сигналов и дезинформации о воздушной обстановке. Неответные помехи не имеют жесткой временной связи с сигналами подавляемой РЛС. Синхронные импульсные помехи имеют частоту следования, согласованную с частотой посылок зондирующих сигналов подавляемой РЛС. Несинхронные импульсные помехи имеют произвольную частоту следования. По степени концентрации мощности излучения в диапазоне частот и направленности излучения помехи подразделяются на прицельные, заградительные и скользящие по частоте. Прицельная по частоте помеха имеет ширину спектра одного порядка с шириной спектра сигнала, т.е.
Заградительная по частоте помеха имеет
Скользящая по частоте помеха – это помеха, средняя частота которой изменяется в заданном диапазоне с установленной скоростью перестройки. Она сочетает прицельный и заградительный режим работы станций активных помех и создает для РТС так называемую нестационарную активную помеху.
ВОПРОС №27 ВОПРОС №28 ВОПРОС №29 ВОПРОС №30 На значение специализированного вычислителя. Специализированный вычислитель (СВ) представляет собой ЭВМ специального назначения третьего поколения. Предназначен для решения специализированных задач обработки информации в комплексах средств автоматизации. В зависимости от использования СВ решаются следующие задачи: а) в комплексе средств отображения и управления: - подготовка информации для отображения ее на рабочих местах (РМ) лиц боевого расчета (ЛБР); - обеспечение взаимодействия лиц ЛБР с ЦВК посредством команд, вводимых с пультовой аппаратуры РМ; б) в комплексе средств передачи информации: - приём информации от ЦВК, формирование кодограмм обмена в соответствии с типом абонента и выдача её пословно в устройство сопряжения с дискретными каналами связи (УСДК); - приём информации из УСДК, преобразование к виду, принятому в ЦВК и её выдача. в) в комплексах обработки радиолокационной информации: - завязка трасс и автоматическое сопровождение воздушных объектов, селекция и отождествление воздушных объектов и т. д. (вторичная обработка РЛИ); - пересчёт координат воздушных объектов из полярной системы в прямоугольную и наоборот; - выдача целеуказаний на РЛС для обнаружения воздушных объектов и уточнение их характеристик; г) в комплексах диагностики: - локализация неисправностей в блоках и типовых элементах замены с помощью специальных тестов (алгоритмов); - перезапись информации в кассеты блока ДЗУ – Э. д) в комплексах построения отчётных документов: - формирование различных моделей боевых действий и выдача их на печать. СВ представляет собой многопроцессорный вычислительный комплекс (ВК) с блочно-модульным построением запоминающих устройств (ЗУ). В зависимости от архитектуры построения спецвычислителя различают следующие его модификации: СВ, СВ-01, СВ-02, СВ-04. Эти модификации имеют общие функциональные устройства и различаются только количеством процессоров, емкостью оперативной и долговременной памяти и решаемыми функциональными задачами. a. Состав СВ В состав СВ входят следующие функциональные устройства (рис.1): 1. Вычислительное устройство 2. Устройство обмена. Эти устройства можно объединить термином процессоры. (В технической документации на СВ под термином процессор подразумевается вычислительное устройство и устройство обмена). 3. Запоминающие устройства: - долговременное запоминающее устройство (ДЗУ-Э-8КМ); - постоянное запоминающее устройство (ПЗУ); - программируемое постоянное запоминающее устройство (ППЗУ); - оперативное запоминающее устройство (ОЗУ-4К); 4. Устройство управления внутренним магистральным каналом (УК). 5. Внутренний магистральный канал в составе: - 18-ти разрядная магистраль адреса (МА) - 36-ти разрядная магистраль чтения (МЧт) - 36-ти разрядная магистраль записи (МЗп) 6. Кодовые шины управления (КШУ1, КШУ2) 7. Пульт оперативного управления СВ (ПОУ СВ) 8. Блоки питания.
Рис 1. Структура СВ Вычислительное устройство (ВчУ) является основным операционным устройством СВ, предназначенным для обработки цифровой и логической информации, реагирования на сигналы прерывания внешних устройств и управления программами устройства обмена. Устройство обмена (УО) предназначено для организации обмена информацией между ОЗУ и абонентами СВ независимо от ВчУ с минимальным количеством прерываний рабочей программы, необходимых для запроса словосостояния устройства обмена и каналов, выдачи разовых команд, запуска и останова каналов. Устройство управления каналом (УК) предназначено для управления взаимодействием нескольких процессоров (УО или ВчУ) с блоками памяти, управления конфигурацией запоминающих устройств и выработки синхронизирующих сигналов для ВчУ и УО. Одно устройство управления каналом (УК) СВ может обеспечить работу со встроенным резервом запоминающих устройств и процессоров в режиме многопроцессорного комплекса, а также комплексирования СВ в однородной многомашинной вычислительной системе. Конфигурация рабочих и резервных блоков памяти осуществляется с помощью программно управляемого регистра конфигурации системы, находящегося в УК, а конфигурация процессоров осуществляется изменением программ, выполняемых ВчУ и УО. Оперативное запоминающее устройство (ОЗУ) предназначено для хранения текущей входной и выходной информации СВ, а также оперативной и рабочей информации программ. Долговременное запоминающее устройство (ДЗУ) служит для хранения программ и сменных констант, с возможностью перезаписи на специальном стенде. Постоянное запоминающее устройство (ПЗУ) предназначено для хранения редко изменяющейся информации: таблиц функций, констант, тестовых и сервисных программ. Пульт оперативного управления (ПОУ СВ) предназначен для ручного управления режимами работы СВ и контроля его функционирования в процессе боевой работы и технического обслуживания. Внутренний магистральный канал (ВМК) обеспечивает информационную связь между ЗУ и блоками ВчУ и УО в процессе работы СВ. b. Основные технические характеристики СВ Система команд и структура устройств СВ обеспечивает построение вычислителя со следующим максимальным составом аппаратуры: - максимальное число блоков ДЗУ по 8К 36-разрядных слов (32 информационных + 4 контрольных) - 8 (4 резервных и 4 рабочих, или при работе без резерва 8 рабочих); - емкость одного блока ДЗУ с электрической перезаписью информации – 8K 36-разрядных слов разрядных слов (32 информационных + 4 контрольных) (команд, констант); - максимальное число блоков ОЗУ по 4К 36-разрядных слов разрядных слов (32 информационных + 4 контрольных) - 7 (1 резервный и 6 рабочих, или при работе без резерва 7 рабочих); - емкость одного блока ОЗУ – 4К 36-разрядных слов разрядных слов (32 информационных + 4 контрольных); - суммарное количество процессоров УО и ВчУ в любом сочетании не может быть больше 8; - быстродействие при выполнении арифметических и логических операций - около 2·105 операций в секунду; - разрядность обрабатываемой ВчУ информации - 18 разрядов (16 информационных и 2 контрольных); - форма представления чисел - с фиксированной запятой в дополнительном - схема приоритетного прерывания текущих программ от внешних сигналов и сигналов, вырабатываемых схемами аппаратного контроля - 16-ти канальная (хотя в системе используются только 5 каналов: 3 канала с РМ и 2 канала с ЦВК); - количество уровней прерывания - один (то есть прерывание в прерывании запрещено); - время вхождения в программу прерывания - не более 25 мкс; - способ реализации прерывания - аппаратно-программный; - количество каналов обмена с внешними устройствами - 4. - типы каналов - селекторные. - разрядность информационных слов в каналах от 1 до 36. - способ обмена информацией - последовательным кодом; - потребляемая мощность - не превышает 1,3 кВт; - предельная скорость обмена информацией-185 тыс. слов/сек. - первичное электропитание - 220 ± 5% В частотой 400±5% Гц, обдув аппаратуры воздухом производится с производительностью - не менее 360 м/час с температурой от + 5 С до + 30 С.
ВОПРОС №31 Взаимодействие элементов СВ в режимах "МОДИФИЦИРОВАННАЯ ЗАПИСЬ" и "ЧТЕНИЕ". c. Принцип взаимодействия устройств СВ Взаимодействие между устройствами, входящими в состав СВ, организуется через ВМК. Основными видами взаимодействия являются: 1. информационный обмен процессоров (УО или ВчУ) с ЗУ (ДЗУ, ОЗУ, ПЗУ) и регистрами УК; 2. взаимодействие между ВчУ и УО; 3. информационный обмен между ВчУ и ПОУ СВ; Информационный обмен осуществляется посредством ВМК: - по МА передаётся 18-ти разрядный адрес ячейки ЗУ (16 информационных + 2 контрольных) от процессора к модулю ЗУ. Адрес ячейки состоит из адреса модуля и адреса ячейки в модуле, при этом адрес ячейки в модуле ОЗУ составляет 12 разрядов, адрес ячейки ДЗУ 13 разрядов. Адресом модуля ЗУ является его номер, адресом ячейки является номер ячейки в блоке. 12 младших разрядов МА используются для передачи команд и нформации из ВчУ в регистры УК(РгУК). - по МЧт передаётся 36-ти разрядное слово от ЗУ к процессору разрядных слов (32 информационных + 4 контрольных), а также 9-ти разрядное слово от РгУк к ВчУ. - по МЗп передаётся 36-ти разрядное слово разрядных слов (32 информационных + 4 контрольных) от процессора к ЗУ. Управление этим обменом осуществляется УК, которое в СВ выполняет функции системы приоритетного обслуживания заявок ВчУ и УО на обращение к ЗУ. УК имеет 8 рангов приоритетов для подключения процессоров. УО имеет наивысший (0-й приоритет), а ВчУ – низший (7-ой приоритет). Управление внутренним обменом УК осуществляет путём выдачи управляющих сигналов по кодовым шинам управления (КШУ). КШУ1 связывает УК и процессоры. КШУ2 связывает УК и модули ЗУ. По КШУ1 передаются следующие сигналы: - ТрОбр1-0…ТрОбр1-7 (Требование обращения 1). Требование обращения процессора к модулю ЗУ для считывания информации по определённому адресу. Передаётся в УК процессором, желающим обратиться к модулю памяти. Номер модуля памяти является его адресом (АМ) и выдается процессором в м
|
||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 5089; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.59.116.142 (0.018 с.) |

 - время запаздывания максимума огибающей пачки эхо-сигналов относительно направления на север. Измерение угловой координаты β ц сводится к определению момента пересечения максимумом ДН направления на цель и считыванию углового положения антенны на устройстве «Указатель поворота антенны». Это устройство обнуляется каждый раз, когда ось ДН антенны совпадает с направлением на север. Таким образом,
- время запаздывания максимума огибающей пачки эхо-сигналов относительно направления на север. Измерение угловой координаты β ц сводится к определению момента пересечения максимумом ДН направления на цель и считыванию углового положения антенны на устройстве «Указатель поворота антенны». Это устройство обнуляется каждый раз, когда ось ДН антенны совпадает с направлением на север. Таким образом,  . Точность определения момента t o зависит от способности оператора улавливать малые изменения интенсивности при небольшом рассогласовании оси ДН и направления на цель. Чем уже ДН антенны, тем теоретически точнее можно определить угловое положение цели.
. Точность определения момента t o зависит от способности оператора улавливать малые изменения интенсивности при небольшом рассогласовании оси ДН и направления на цель. Чем уже ДН антенны, тем теоретически точнее можно определить угловое положение цели.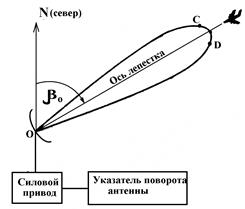
 .
.

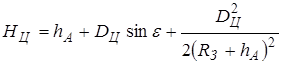
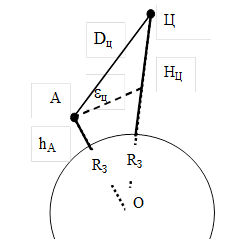 Измерение высоты цели может осуществляться на основе координатной информации (рис.3.1). Высоту цели относительно земной поверхности можно найти измеряя на РЛС наклонную дальность до цели DЦ и угол азимута e. Для точного измерения высоты цели необходимо учесть атмосферную рефракцию и кривизну Земли. Нормальная атмосферная рефракция, соответствующая стандартной атмосфере, может быть приближенно учтена переходом от действительного радиуса земного шара RЗ к эффективному RЭ=4/3 RЗ. В таком случае, пользуясь геометрией рисунка (3.1) из треугольника ОАЦ по теореме косинусов определим сторону ОЦ:
Измерение высоты цели может осуществляться на основе координатной информации (рис.3.1). Высоту цели относительно земной поверхности можно найти измеряя на РЛС наклонную дальность до цели DЦ и угол азимута e. Для точного измерения высоты цели необходимо учесть атмосферную рефракцию и кривизну Земли. Нормальная атмосферная рефракция, соответствующая стандартной атмосфере, может быть приближенно учтена переходом от действительного радиуса земного шара RЗ к эффективному RЭ=4/3 RЗ. В таком случае, пользуясь геометрией рисунка (3.1) из треугольника ОАЦ по теореме косинусов определим сторону ОЦ:
 ) в виде:
) в виде:

 , при
, при  получим:
получим:
 =8500. Подставляя это значение в и пренебрегая малостью величины
=8500. Подставляя это значение в и пренебрегая малостью величины  по сравнению с
по сравнению с  получим:
получим: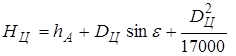

 поправка на рефракцию, причем: Н1 значение высоты соответствующее углу места цели
поправка на рефракцию, причем: Н1 значение высоты соответствующее углу места цели  и стандартной рефракции,
и стандартной рефракции,  - значение эквивалентной приведенной температуры при стандартной рефракции. В ряде РЛС в ЦВС записаны
- значение эквивалентной приведенной температуры при стандартной рефракции. В ряде РЛС в ЦВС записаны  и e для расчета Н1 соответствующее нормальной рефракции.
и e для расчета Н1 соответствующее нормальной рефракции.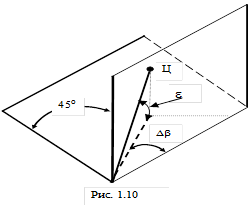 Станция с V – образным лучом дает возможность определить все три координаты цели. Определение дальности и азимута производится с помощью вертикального луча, а высота при помощи вертикального и наклонного.
Станция с V – образным лучом дает возможность определить все три координаты цели. Определение дальности и азимута производится с помощью вертикального луча, а высота при помощи вертикального и наклонного.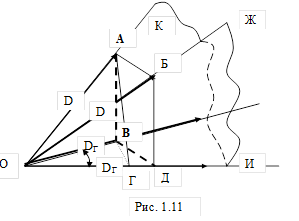 Проводим сечение АВГ, перпендикулярное линии ОИ (линии пересечения плоскостей ОЖИ и ОКИ); угол АГВ = 450, угол АВГ = 90 0 следовательно, треугольник ГВА равнобедренный и ВГ = АВ = НЦ. Из треугольника ОВГ имеем:
Проводим сечение АВГ, перпендикулярное линии ОИ (линии пересечения плоскостей ОЖИ и ОКИ); угол АГВ = 450, угол АВГ = 90 0 следовательно, треугольник ГВА равнобедренный и ВГ = АВ = НЦ. Из треугольника ОВГ имеем:

 (1)
(1)
 (2)
(2) (3)
(3) (4)
(4) (5)
(5) , которое для нашего случая примет вид:
, которое для нашего случая примет вид: (6)
(6)
 - площадь некоторой фиктивной плоской поверхности, положенной нормально к направлению падающей волны и являющейся идеальным и изотропным переизлучателем, которая, будучи помещена в точку цели, создает у антенны РЛС ту же плотность потока мощности, что и реальная цель. Из определения следует, что полностью переизлучаемая ЭПР мощность
- площадь некоторой фиктивной плоской поверхности, положенной нормально к направлению падающей волны и являющейся идеальным и изотропным переизлучателем, которая, будучи помещена в точку цели, создает у антенны РЛС ту же плотность потока мощности, что и реальная цель. Из определения следует, что полностью переизлучаемая ЭПР мощность , (1.1)
, (1.1) - плотность потока мощности падающей плоской волны у цели (т.е., мощность, приходящаяся на
- плотность потока мощности падающей плоской волны у цели (т.е., мощность, приходящаяся на  поверхности волнового фронта). Плотность потока мощности у РЛС
поверхности волнового фронта). Плотность потока мощности у РЛС , (1.2)
, (1.2) . (1.3)
. (1.3) у РЛС с учетом же направленных свойств цели равна
у РЛС с учетом же направленных свойств цели равна . (1.7)
. (1.7) , (1.8)
, (1.8) - характеризует геометрические свойства цели,
- характеризует геометрические свойства цели,  - свойство цели избирательно отражать энергию в определенных угловых направлениях (анизотропность). Так как величина
- свойство цели избирательно отражать энергию в определенных угловых направлениях (анизотропность). Так как величина  . (1.9)
. (1.9)
 .
. .
.



