Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Цифрова обробка радіолокаційних сигналівСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Прийнято розрізняти два основних класи алгоритмів цифрової обробки (виявлювачів) сигналів: – параметричні виявлювачі; – непараметричні виявлювачі. До першого класу відносяться виявлювачі сигналів, які мають досить високу ефективність, але низьку стабільність імовірності помилкової тривоги (ІПТ) до зміни параметрів (наприклад, потужності) перешкод. Прикладом параметричних виявлювачів є пристрої первинної обробки радіолокаційних сигналів, які використовуються в системах "Старт" і "Теркас". Другий клас виявлювачів має ту властивість, що їхній ІПТ не залежить від розподілу перешкод, в залежності від чого такі алгоритми виявлення звуться непараметричними. Платою за інваріантість ІПТ є зниження ефективності виявлення сигналів у порівнянні з параметричними алгоритмами. Найпростішим у класі параметричних є виявлювачі бінарно-квантових сигналів. Нижче надається короткий опис принципу його роботи. В разі цифрової обробки радіолокаційної інформації передбачається автоматичне (без участі оператора) формування рішення про наявність або відсутність радіолокаційного об'єкта (цілі) в кожному розподільному елементі дальності. Елементом розподілення за дальністю
де с – швидкість світла; В разі відомої дальності дії РЛС легко визначити число розподільних елементів дальності N, по кожному з яких повинно автоматично прийматися рішення про наявність або відсутність радіолокаційної цілі. Таким чином, число елементів N = R/ Елементам дальності зручно приписувати номери: 0,1,2,3,..., N–1, вважаючи, що "нульовим" елементом дальності є ділянка від місця встановлення РЛС до точки (вздовж радіальної лінії), яка знаходиться на відстані
Спрощено алгоритм роботи цифрового виявляча бінарно-квантованих сигналів можна описати таким чином. В момент випромінювання зондуючого імпульсу РЛС запускається синхрогенератор,
який формує серію з N-коротких, рознесених на інтервал часу
Рис. 3.2. Часові діаграми бінарно-квантовані сигнали за число періодів зондування, яке дорівнює п. Така сума носить назву перевірної статистики.
де Отже, обчислювач перевірної статистики повинен утримувати в пам'яті по кожному елементу дальності інформацію лише за п періодів зондування. В наступному радіолокаційному такті з пам'яті повинен видалятися бінарно-квантований сигнал, який відповідає "найстарішому" періоду зондування, а на його місце надійде сигнал з поточного такту. Така процедура накопичення інформації носить назву "ковзне вікно". Таким чином, перевірна статистика Z формується для кожного елемента дальності, а далі порівнюється з порогом рішення Un з метою перевірки гіпотези про наявність або відсутність цілі в елементі дальності, що аналізується. Виділена (пунктиром) частина схеми здійснює амплітудне квантування і часову дискретизацію аналогового відеосигналу. Для квантування аналогових сигналів можуть бути застосовані різні порогові пристрої, наприклад, тригер Шмідта (1C 155ТЛ1), компаратор (1C 521СА2) та інші. Як виходить з часової діаграми (рис. 3.2) тривалість кліпірованого сигналу U(t) дорівнює часу перевищення відеосигналом Y(t) порога квантування Узагальнена структурно-функціональна схема виявляча бінарно-квантованих сигналів зображена на рис. 3.3. D-тригер здійснює часову дискретизацію процесу U(t), формуючи на виході сигнали Uі по одному на кожний елемент дальності. Часова дискретизація відбувається через подачу на синхро-вхід D-тригера послідовності синхроімпульсів С, рознесених на інтервал часу
Рис. 3.3. Структурно-функціональна схема виявляча: 1 – радіочастотний тракт радіоприймача; 2 – детектор обвідної; 3 – компаратор з порогом квантування Мікрокоманди С1–С5 з'являються як результат "розщеплення" кожного синхроімпульсу С на п'ять, і можуть бути сформовані, наприклад, за допомогою синхронізатора, функціональна схема якого зображена на рис. 3.4.
Рис. 3.4. Схема формування імпульсів С1–С5 мікрокоманд
Час, відведений на виконання п'яти мікрокоманд С1–С5, не повинен перевищувати Синхрогенератор формує N імпульсів згідно з числом оброблених елементів дальності (рис. 3.5).
Рис. 3.5. Діаграми формування імпульсів С1–С5
Припустимо, що в будь-який момент часу в простір випромінюється зондуючий імпульс ІП. Синхрогенератором виробляється послідовність синхроімпульсів С. В момент появи першого синхроімпульсу СD-тригером (рис. 3.3) "защіпується" бінарно-квантований сигнал U1, який відповідає першому елементу дальності. Одночасно синхрогенератор починає виробляти послідовність імпульсів мікрокоманд С1–С5 (перед приходом ІП ЛА обнуляється). За командою С1 булеве слово, яке складається з n-1 булевих змінних (тобто n-1 бінарно-квантових сигналів, сформованих за n-1 попередніх радіолокаційних тактів), зчитується з ОЗП за адресою, яка зберігається в ЛА (на початку циклу обробки – це нульова адреса, тобто адреса, за якою з ОЗП зчитується інформація, яка відповідає найближчому до РЛС кільцю дальності) і розмішується в розрядах регістра Rg з другого по n-й. Одночасно з цим до першого розряду Rg записується бінарно-квантований сигнал, який зберігається в D-тригері. Таким чином, в регістрі розміщується бінарно-квантована інформація, що відповідає аналізованому (в цьому випадку – нульовому) елементу дальності за n радіолокаційних тактів, у тому числі і поточний. При чому в молодшому розряді регістра утримується сигнал Uі, формований у поточному радіолокаційному такті, а в n - розряді зберігається інформація "найстарішого" радіолокаційного такту. За командою С2 працює СА, яка підраховує число одиниць, що зберігаються в регістрі (тобто формується перевірна статистика Z за даними "ковзного вікна"), і порівнює її з порогом рішення Найпростішим у класі непараметричних є так званий знаковий алгоритм виявлення, який формує перевірну статистику:
де: l(t) – одинична функція, яка дорівнює одиниці, при t>0 і нулю при t<0; Якщо ціль у цих елементах дальності відсутня, то відліки Структурна схема знакового виявлювача повністю відповідає схемі, зображеній на рис. 3.3, за винятком того, що замість фіксованого порога квантування В усьому іншому принцип дії (і структура команд) знакового виявлювача збігається з описаним виявлювачем бінарно-квантованих сигналів.
Як приклад, розглянемо процес реалізації вузлів виявляча за таких умов. Задані: частота повторення зондуючих ( Частота проходження синхроімпульсів fс=1/ На вивід "строб" подається стробуючий імпульс, який перериває роботу компаратора на час роботи передавача РЛС. Цей компаратор має вихідний рівень ТТЛ. Час переключення 12 нc,
Як тригер, що фіксує бінарно-квантований сигнал, який надходить з компаратора, можна застосувати ІC К155ТМ5 із середньою швидкодією 13 нс, яка забезпечує роботу згідно з розрахованою вище тактовою частотою. Як регістр Rg можна застосувати IС К155ІР13 – універсальний восьмирозрядний синхронний регістр зсуву з тактовою частотою до 25 МГц. В розглянутому прикладі при обсязі вибірки N=16 для забезпечення зберігання 16 біт інформації використовуються три корпуси 1C К155ІР13 (рис. 3.8). Працює схема регістра-накопичувача за командами С1–С5 у відповідності з раніше викладеним принципом. Ємність ОЗП визначається за знайденим числом елементів дальності N=851 і обсягом пам'яті ОЗП за кожним елементом (в ОЗП постійно зберігаються 15 біт інформації, тому що молодший біт надходить з тригера). Тоді ємність ОЗП М = Мозп = 12765 біт. Для реалізації ОЗП застосовується ІC К155РУ5. Чотири корпуси ІС утворюють лінійку ємністю 1024 біт, яка обслуговує 851 елемент розподілу за дальністю.
П'ятнадцять таких лінійок забезпечують необхідну вибірку із 16 періодів (перший період поточний). Всього потрібно 60 корпусів ІC К155РУ5. Робота ОЗП організована таким чином. При аналізі першого інтервалу-роздільного елемента дальності запитуються перші комірки 15 лінійок. Після аналізу записується оновлена інформація в ці самі комірки. Далі запитуються другі комірки 15 лінійок (при аналізі другого роздільного елемента дальності) і так до 851. Для організації ОЗП можна застосувати ІC інших серій, наприклад, 541, 565 та інших, що дозволить значно зменшити енергоспоживання і покращити конструкторсько-технологічні показники. В якості ЛА можна застосувати ІC К155ІЕ7. Для адресації 851 елемента в 15 лінійок ОЗП використовуємо три чотирирозрядні послідовно ввімкнені лічильники (рис. 3.9), виходи яких паралельно з'єднані з дешифратором адреси кожної з 15 лінійок. Максимальна тактова частота лічильника 25 МГц. Одна з можливих схем побудови обчислювача
Рис. 3.9. Схема організації ЛА
перевірної статистики Z з об'ємом вибірки n = 15 зображена на рис. 3.10. Як складові елементи схеми використовуються ІC К155ТМ2 (дворозрядний суматор) і К155ТМЗ (чотирирозрядний суматор) і схема порівняння чотирирозрядних чисел К555СП1. Для синхронізації схеми аналізу виходи відповідних розрядів регістра підключаються через буферні елементи, які відкриваються мікрокомандами С2. Це забезпечують три корпуси ІC К155ЛПІІ (шість повторювачів із роздільним керуванням).
Рис. 3.10. Побудова схеми аналізу; Е – вхід позики суматора
Ці мікросхеми забезпечують потрібну швидкодію. Перевірна статистика чотирирозрядною шиною підводиться до входу А цифрового компаратора, на другий вхід В якого подається цифровий код порога рішення Up. Відклик компаратора У приймає значення "1", при Z>UP, в іншому випадку – "0". Приклади розробки схем цифрових виявлювачів бінарно-квантованих сигналів наводяться у літературі [17], [18].
|
||||||||
|
|
Последнее изменение этой страницы: 2016-12-13; просмотров: 553; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.012 с.) |

 є така мінімальна відстань між двома радіолокаційними об'єктами, яка зумовлює появу на екрані РЛС двох крапок, які світяться. Якщо об'єкти знаходяться на відстані, яка менша
є така мінімальна відстань між двома радіолокаційними об'єктами, яка зумовлює появу на екрані РЛС двох крапок, які світяться. Якщо об'єкти знаходяться на відстані, яка менша  ,
, – тривалість зондуючого імпульсу.
– тривалість зондуючого імпульсу. .
.
 стробувальних імпульсів С (рис. 3.2), за допомогою яких буде проводитися відлік (знімання, вимірювання) відеосигналів, які відповідають послідовності N-елементів розподілення за дальністю. Припустимо, що в деякому j-му кільці дальності знаходиться радіолокаційна ціль. По мірі "набігання" на ціль діаграми спрямованості антени на вхід приймача починають надходити відбиті від об'єкта сигнали (луна-сигнали). Потужність луна-сигналу пропорційна ефективній площі розсіяння цілі. Число п відбитих від цілі сигналів, що потрапляють на вхід приймача, залежить від ширини діаграми спрямованості антени, швидкості її обертання та частоти зондуючих імпульсів. Для прийняття рішення стосовно наявності або відсутності цілі в будь-якому елементі дальності має сенс накопичувати (підсумовувати)
стробувальних імпульсів С (рис. 3.2), за допомогою яких буде проводитися відлік (знімання, вимірювання) відеосигналів, які відповідають послідовності N-елементів розподілення за дальністю. Припустимо, що в деякому j-му кільці дальності знаходиться радіолокаційна ціль. По мірі "набігання" на ціль діаграми спрямованості антени на вхід приймача починають надходити відбиті від об'єкта сигнали (луна-сигнали). Потужність луна-сигналу пропорційна ефективній площі розсіяння цілі. Число п відбитих від цілі сигналів, що потрапляють на вхід приймача, залежить від ширини діаграми спрямованості антени, швидкості її обертання та частоти зондуючих імпульсів. Для прийняття рішення стосовно наявності або відсутності цілі в будь-якому елементі дальності має сенс накопичувати (підсумовувати)

 ,
,  – поріг квантування (на діаграмі Y(t)).
– поріг квантування (на діаграмі Y(t)). . Процес накопичення інформації, тобто формування перевірної статистики Z по кожному елементу дальності в режимі "ковзного вікна" і прийняття рішення про наявність або відсутність цілі у роздільних елементах дальності, відбувається в блоках 5–8 під керуванням п'яти мікрокоманд, які позначимо через С1–С5.
. Процес накопичення інформації, тобто формування перевірної статистики Z по кожному елементу дальності в режимі "ковзного вікна" і прийняття рішення про наявність або відсутність цілі у роздільних елементах дальності, відбувається в блоках 5–8 під керуванням п'яти мікрокоманд, які позначимо через С1–С5.

 . У випадку, якщо
. У випадку, якщо  , приймається рішення про наявність цілі, в іншому випадку – про її відсутність. За командою СЗ відбувається зсув інформації в регістрі. При цьому "найстаріший" сигнал, що відповідає останньому з n – радіолокаційних тактів, втрачається. За командою С4 інформація з другого розряду регістра по n-й переписується в ОЗП за адресою, яка утримується ЛА. При зчитуванні цього слова з ОЗП в черговому радіолокаційному такті воно буде розміщено в розрядах регістра з другого по n -й. Отже, слово мовби рухається на один розряд вправо. Такий обмін інформацією між Rg і ОЗП і забезпечує режим "ковзного вікна". За командою С5 зміст ЛА збільшується на одиницю, що забезпечує підготовку до обробки інформації з наступного (старшого по відношенню до обробленого) елемента дальності. Обробка інформації наступного елемента дальності починається з моменту приходу синхроімпульсу С, яким в D-тригері фіксується бінарно-квантований сигнал, що відповідає цьому елементу дальності, а синхрогенератором виробляється послідовність мікрокоманд С1–С5, під керуванням яких відбувається описана процедура обробки інформації. Після обробки інформації в останньому N-му елементі дальності ЛА-обнуляється, а з надходженням наступного ІП процедура обробки послідовно по елементам дальності повторюється відповідно до приведеного алгоритму.
, приймається рішення про наявність цілі, в іншому випадку – про її відсутність. За командою СЗ відбувається зсув інформації в регістрі. При цьому "найстаріший" сигнал, що відповідає останньому з n – радіолокаційних тактів, втрачається. За командою С4 інформація з другого розряду регістра по n-й переписується в ОЗП за адресою, яка утримується ЛА. При зчитуванні цього слова з ОЗП в черговому радіолокаційному такті воно буде розміщено в розрядах регістра з другого по n -й. Отже, слово мовби рухається на один розряд вправо. Такий обмін інформацією між Rg і ОЗП і забезпечує режим "ковзного вікна". За командою С5 зміст ЛА збільшується на одиницю, що забезпечує підготовку до обробки інформації з наступного (старшого по відношенню до обробленого) елемента дальності. Обробка інформації наступного елемента дальності починається з моменту приходу синхроімпульсу С, яким в D-тригері фіксується бінарно-квантований сигнал, що відповідає цьому елементу дальності, а синхрогенератором виробляється послідовність мікрокоманд С1–С5, під керуванням яких відбувається описана процедура обробки інформації. Після обробки інформації в останньому N-му елементі дальності ЛА-обнуляється, а з надходженням наступного ІП процедура обробки послідовно по елементам дальності повторюється відповідно до приведеного алгоритму.
 та
та  – відлік процесу на виході детектора відповідно в "сигнальному" і в "шумовому" елементах дальності, взятих у і –му радіолокаційному такті.
– відлік процесу на виході детектора відповідно в "сигнальному" і в "шумовому" елементах дальності, взятих у і –му радіолокаційному такті.
 t, (
t, ( с =
с =  R /с = 0,65мкс.
R /с = 0,65мкс. с1-с5 =
с1-с5 =  с/6 = 0,108 мкс. Синхроімпульси С можна отримати з імпульсів
с/6 = 0,108 мкс. Синхроімпульси С можна отримати з імпульсів 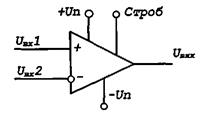
 Рис. 3.8. Схема регістра-накопичувача
Рис. 3.8. Схема регістра-накопичувача