Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Проектування ппос діапазонів гектометрових (гмх), декаметрових (дкмх) і метрових (мх) хвильСодержание книги
Поиск на нашем сайте
ПРОЕКТУВАННЯ ППОС ДІАПАЗОНІВ ГЕКТОМЕТРОВИХ (ГМХ), ДЕКАМЕТРОВИХ (ДКМХ) І МЕТРОВИХ (МХ) ХВИЛЬ
Проектування функціональних схем Тракт проміжної частоти
Склад тракту проміжної частоти в значній мірі визначається кількістю ступенів перетворення частоти, а це у свою чергу залежить від вимог до селективності і смуги пропускання пристрою. Крім цього, необхідно враховувати необхідне підсилення лінійного тракту, тому що основне підсилення приймача здійснюється в тракті останньої проміжної частоти. Як відомо, динамічний діапазон (ДД) рівнів вхідних впливів у РПП може перевищувати 100 дБ. Це необхідно враховувати при виборі активних елементів як ПСЧ так і перетворювача частоти. Сучасні перетворювачі на біполярних (БП) транзисторах і ІС мають ДД до 50...60 дБ, польові транзистори – до 90...100 дБ, кільцеві і балансні перетворювачі на напівпровідникових діодах – до 120...130 дБ. Гарні результати по розширенню ДД дає використання ключових перетворювачів частоти з формою коливання гетеродина – меандр. Ці перетворювачі особливо перспективні для приймачів інфрадинного прийому (див.5, с.160). Якщо даних з ДД перетворювача немає, при орієнтовних розрахунках допустиме значення сигналу на вході першого змішувача на польовому транзисторі можна приймати рівним 200...500 мкВ, на біполярному транзисторі – 30...40 мкВ; на вході другого змішувача – 2...5 мВ і 300...400 мкВ відповідно на польовому і біполярному транзисторах. В даний час випускається цілий ряд гібридних інтегральних схем ГІС серій К224, К228, К235, К237 та інших з транзисторними перетворювачами частоти з ДД по входу близько 60дБ. Перспективними для перетворення є двозасувні польові транзистори. У пристроях із двох і більш кратним перетворенням частоти необхідно забезпечити придушення паразитних каналів відповідних дзеркальних частот до змішувачів. Проектуючи склад тракту останньої проміжної частоти, необхідно звернути увагу, зокрема для приймачів ДКМХ, на різноманіття їхніх режимів роботи, через що істотно ускладнюється цей тракт. Наприклад, професійні пристрої магістрального зв'язку можуть приймати сигнали з АМ (A3), AT (AІ й А2), ОМ (АЗВ, АЗА, АЗТ), ЧТ (F 1), ДЧТ
де mК , mБ – коефіцієнти включення фільтра з боку виходу і входу відповідно; Rвх,Rвих,Кф – параметри обраного фільтру. Конкретний тип ФЗВ – багатоланковий LC – фільтр, п’єзокерамічний, п’єзокристалічний, п’єзомеханічний, магнітострікційний – вибирається чи розраховується за необхідною смугою пропускання 2 Однак розвиток мікроелектроніки вимагав пошуку нових технічних рішень для частотно-селективних цілей, тому що, являючись найбільш важливими, вони залишалися і найбільш габаритними і погано узгоджуваними з вхідними і вихідними параметрами ІС. Тому в останні роки велися інтенсивні дослідження в області синтезу нових селективних ланок, однак питання про повну заміну традиційних LC – фільтрів поки що не вирішене. І зараз вітчизняна промисловість випускає LC – фільтри у вигляді закінчених вузлів, які узгоджуються за розмірами з корпусами ІС [4, с.184]. Останнім часом знайшли застосування інтегральні п’єзофільтри (електрична схема виконана у вигляді ІС і розміщена в одному корпусі з п’єзоелементами). До них відносяться, наприклад, фільтри на об'ємних чи поверхневих хвилях (ПАХ), які, будучи пристроями функціональної мікроелектроніки, мають обсяг і масу більш ніж у 1000 разів меншу і вартість більш ніж у 3 рази меншу звичайних п'єзоелектричних фільтрів. Діапазон їхніх частот від 3...30 до 250 МГц (на гармоніках), з добротністю Досяжні на сьогодні параметри смугових фільтрів на ПАХ наводяться в роботі [4, с.223]. Наприклад, вузькосмуговий фільтр на частоті f 0= 46 МГц з
Найбільш перспективними фільтрами для сучасної технології є елементи на основі електричних схем або активні фільтри. У практичних конструкціях фільтрів роль активних елементів звичайно виконують операційні підсилювачі на ГІС. Методи синтеза структурної схеми, розрахункові співвідношення, приклади реалізації схем активних LС – і RС – фільтрів можна знайти в роботі [4, с. 188–201]. Приклад проектування RС – фільтра другого порядку на операційних підсилювачах (ОП) К1УТ401А з частотою f 0= 3 МГц приводиться в [6]. Побудова тракту проміжної частоти за методом зосередженої вибірковості і розподіленого підсилення дозволяє проектувати ППЧ як широкосмугові або резистивні підсилювачі. Для побудови таких підсилювачів застосовують ІС серій: К218, К219, К224, К235, К237. Ряд з них, наприклад, 235УРЗ, 235УР7, 235УР9 й інші виконані з елементами АРП. В результаті орієнтовного розрахунку тракту проміжної частоти повинні бути обґрунтовані й визначені: – його остаточний склад; – конкретні типи вибіркових систем, виходячи з необхідних значень придушення частот сусідніх каналів, а при двох і більш кратному перетворенні частоти й інших паразитних каналів; – активні елементи і кількість каскадів тракту. – принципова схема тракту. У тих пристроях, де застосовуються різні типи демодуляторів, які відрізняються значеннями UвхД, загальний тракт проміжної частоти f пр розраховують з умови забезпечення мінімальної вхідної напруги на детекторі UвхДmin. Необхідний рівень напруги для інших детекторів забезпечується додатковими ступенями підсилення окремих трактів.
Тракт демодуляції
Проектування демодуляторів припускає насамперед обґрунтований вибір одного з декількох варіантів його побудови. Для пристроїв систем електрозв'язку з безперервними сигналами функції демодуляції обмежимо операціями детектування, тобто виділення напруги модулюючих коливань. Крім традиційних схем детекторів з використанням нелінійного елемента (обмежувача) в АМ детекторах, аналогового перемножувача у фазових детекторах (ФД), перетворювача частотного зсуву в зміну амплітуди чи фази з наступним застосуванням АМ або ФД у схемах частотних детекторів (ЧД), у даний час, внаслідок появи функціонально складних ІС із системами ФАП, для демодуляції сигналів з АМ, ФМ і ЧМ стали широко застосовуватися демодулятори в аналоговому чи цифровому виконанні, АМ детектори кореляційного типу, а також детектори з виділенням обвідної комплексного сигналу (квадратурні детектори). З АМ детекторів найбільше поширення одержали прості й економічні діодні детектори, що вносять мінімальні нелінійні перекручування при максимальному динамічному діапазоні вхідного сигналу. Часто діодний детектор використовують у якості поєднаного детектору сигналу й системи АРП. Деякі серії ІС містять у своєму складі детектор АМ сигналів і детектор АРП з підсилювачем постійного струму (ППС), наприклад, К175ДД1, 235ДД2, 175ДД1, 435ДД1. Використовуючи нелінійний елемент типу "ідеальний діод" (приклад схеми див. [4, с.169]), що представляє собою підсилювач (звичайно ОП), охоплений нелінійним зворотним зв'язком, можна істотно поліпшити характеристики амплітудних детекторів. При сигналі близько 60...100 мВ АМ детектор на ідеальному діоді можна вважати також ідеальним з
Схеми когерентних амплітудних детекторів (КАД) перед іншими типами АД мають переваги в лінійності амплітудної характеристики при слабких сигналах. Багатофункціональна ІС К174 ХА12 може бути використана як звичайний АД, як КАД, як детектор ФМ чи ЧМ. Для детектування ОМ сигналів може бути використана схема КАД, у якому замість перемножувача використовується змішувач на АП [4, с.153,171]. Усі попередні схеми мають один загальний недолік – вихідний сигнал містить продукти нелінійного перетворення вхідного сигналу і вимагає післядетекторної фільтрації, а відповідно і великого розносу частот модулюючого сигналу і несучої. Від цього недоліку вільна схема, що виділяє обвідну сигналу. Ця схема містить у собі два квадратори, суматор і схеми витягу кореня. У такому складі ця схема знаходить широке застосування при цифровій обробці сигналу. Схема в аналоговій реалізації містить фазообертач на При використанні одного з варіантів розглянутих АД і реалізації їх на ІС, з огляду на дані конкретних мікросхем, потрібно оцінити основні показники схеми: коефіцієнт передачі детектора Кд, динамічний діапазон, припустимі перекручування. При необхідності підключення до ІС зовнішніх елементів, треба обґрунтовано їх підібрати. Аналогічні вимоги необхідно виконати в разі проектування ФД і ЧД. Питання вибору схем, розрахункові співвідношення для різних типів детекторів, рекомендації з використання ІС і їхні типові схеми включення приведені в роботах: [1, гл.9]; [2, гл.9 і 10]; [3, гд.9]; [4, с.117,167–178]; [7, с.72–89]; [8,с.31–33]. На цьому можна закінчити розгляд питань проектування ФП основного тракту проходження сигналу. Однак, як відомо, до складу пристроїв навіть невисокого класу обов'язково входять допоміжні системи і ФП у вигляді вимірників і управителів алгоритмів обробки сигналу або деяких параметрів приймача. До них відносяться, наприклад, системи АРП й автоматичного підстроювання частоти (АПЧ).
Відповідно до жорстких вимог відносно частотної стабільності в сучасних ППОС гетеродинуючі напруги одержують з коливань опорного кварцового генератора в синтезаторах, до складу яких входять ланцюги автоматичного підстроювання частоти. Тому детальна розробка АПЧ як і синтезатора частоти не є обов'язковою вимогою типового завдання на курсову роботу з ППОС. Тут можна обмежитися описом функціональної побудови синтезатора і перерахуванням його основних технічних характеристик і параметрів. Варто врахувати, що в останніх розробках найбільше поширення знаходять цифрові синтезатори, які краще піддаються інтеграції, чим аналогові. Для одержання від такого синтезатора напруги гетеродина у формі гармонійного коливання потрібна фільтрація першої гармоніки імпульсного коливання, при цьому можна одночасно здійснювати перенос сітки стабільних частот у більш високочастотний діапазон при незмінному кроці і діапазоні перебудови (див. [4, с.58–60, 68–80], [9]).
Рис. 3.5. Діаграми формування імпульсів С1–С5
Припустимо, що в будь-який момент часу в простір випромінюється зондуючий імпульс ІП. Синхрогенератором виробляється послідовність синхроімпульсів С. В момент появи першого синхроімпульсу СD-тригером (рис. 3.3) "защіпується" бінарно-квантований сигнал U1, який відповідає першому елементу дальності. Одночасно синхрогенератор починає виробляти послідовність імпульсів мікрокоманд С1–С5 (перед приходом ІП ЛА обнуляється). За командою С1 булеве слово, яке складається з n-1 булевих змінних (тобто n-1 бінарно-квантових сигналів, сформованих за n-1 попередніх радіолокаційних тактів), зчитується з ОЗП за адресою, яка зберігається в ЛА (на початку циклу обробки – це нульова адреса, тобто адреса, за якою з ОЗП зчитується інформація, яка відповідає найближчому до РЛС кільцю дальності) і розмішується в розрядах регістра Rg з другого по n-й. Одночасно з цим до першого розряду Rg записується бінарно-квантований сигнал, який зберігається в D-тригері. Таким чином, в регістрі розміщується бінарно-квантована інформація, що відповідає аналізованому (в цьому випадку – нульовому) елементу дальності за n радіолокаційних тактів, у тому числі і поточний. При чому в молодшому розряді регістра утримується сигнал Uі, формований у поточному радіолокаційному такті, а в n - розряді зберігається інформація "найстарішого" радіолокаційного такту. За командою С2 працює СА, яка підраховує число одиниць, що зберігаються в регістрі (тобто формується перевірна статистика Z за даними "ковзного вікна"), і порівнює її з порогом рішення
Найпростішим у класі непараметричних є так званий знаковий алгоритм виявлення, який формує перевірну статистику:
де: l(t) – одинична функція, яка дорівнює одиниці, при t>0 і нулю при t<0; Якщо ціль у цих елементах дальності відсутня, то відліки Структурна схема знакового виявлювача повністю відповідає схемі, зображеній на рис. 3.3, за винятком того, що замість фіксованого порога квантування В усьому іншому принцип дії (і структура команд) знакового виявлювача збігається з описаним виявлювачем бінарно-квантованих сигналів.
Як приклад, розглянемо процес реалізації вузлів виявляча за таких умов. Задані: частота повторення зондуючих ( Частота проходження синхроімпульсів fс=1/ На вивід "строб" подається стробуючий імпульс, який перериває роботу компаратора на час роботи передавача РЛС. Цей компаратор має вихідний рівень ТТЛ. Час переключення 12 нc,
Як тригер, що фіксує бінарно-квантований сигнал, який надходить з компаратора, можна застосувати ІC К155ТМ5 із середньою швидкодією 13 нс, яка забезпечує роботу згідно з розрахованою вище тактовою частотою. Як регістр Rg можна застосувати IС К155ІР13 – універсальний восьмирозрядний синхронний регістр зсуву з тактовою частотою до 25 МГц. В розглянутому прикладі при обсязі вибірки N=16 для забезпечення зберігання 16 біт інформації використовуються три корпуси 1C К155ІР13 (рис. 3.8). Працює схема регістра-накопичувача за командами С1–С5 у відповідності з раніше викладеним принципом. Ємність ОЗП визначається за знайденим числом елементів дальності N=851 і обсягом пам'яті ОЗП за кожним елементом (в ОЗП постійно зберігаються 15 біт інформації, тому що молодший біт надходить з тригера). Тоді ємність ОЗП М = Мозп = 12765 біт. Для реалізації ОЗП застосовується ІC К155РУ5. Чотири корпуси ІС утворюють лінійку ємністю 1024 біт, яка обслуговує 851 елемент розподілу за дальністю.
П'ятнадцять таких лінійок забезпечують необхідну вибірку із 16 періодів (перший період поточний). Всього потрібно 60 корпусів ІC К155РУ5. Робота ОЗП організована таким чином. При аналізі першого інтервалу-роздільного елемента дальності запитуються перші комірки 15 лінійок. Після аналізу записується оновлена інформація в ці самі комірки. Далі запитуються другі комірки 15 лінійок (при аналізі другого роздільного елемента дальності) і так до 851. Для організації ОЗП можна застосувати ІC інших серій, наприклад, 541, 565 та інших, що дозволить значно зменшити енергоспоживання і покращити конструкторсько-технологічні показники. В якості ЛА можна застосувати ІC К155ІЕ7. Для адресації 851 елемента в 15 лінійок ОЗП використовуємо три чотирирозрядні послідовно ввімкнені лічильники (рис. 3.9), виходи яких паралельно з'єднані з дешифратором адреси кожної з 15 лінійок. Максимальна тактова частота лічильника 25 МГц. Одна з можливих схем побудови обчислювача
Рис. 3.9. Схема організації ЛА
перевірної статистики Z з об'ємом вибірки n = 15 зображена на рис. 3.10. Як складові елементи схеми використовуються ІC К155ТМ2 (дворозрядний суматор) і К155ТМЗ (чотирирозрядний суматор) і схема порівняння чотирирозрядних чисел К555СП1. Для синхронізації схеми аналізу виходи відповідних розрядів регістра підключаються через буферні елементи, які відкриваються мікрокомандами С2. Це забезпечують три корпуси ІC К155ЛПІІ (шість повторювачів із роздільним керуванням).
Рис. 3.10. Побудова схеми аналізу; Е – вхід позики суматора
Ці мікросхеми забезпечують потрібну швидкодію. Перевірна статистика чотирирозрядною шиною підводиться до входу А цифрового компаратора, на другий вхід В якого подається цифровий код порога рішення Up. Відклик компаратора У приймає значення "1", при Z>UP, в іншому випадку – "0". Приклади розробки схем цифрових виявлювачів бінарно-квантованих сигналів наводяться у літературі [17], [18].
Цифрові системи АРП. Розглянуті нижче цифрові системи можуть бути використані при проектуванні ППОС систем електрозв¢язку та радіонавігаціі.
Таблиця 1 До вибору студентом номера варіанту
Початкові дані та завдання з курсового проектування надані у таблицях 2,3 та 4. Номер варіанту відповідає останній цифрі шифру. Зауваження. 1) Необговорені у завдані ТУ вибираються та обгрунтовуються самостійно.2) В табл.2,4 позначено а=Uвхmax/Uвхmin, p= Uвихmax/Uвихmin. Таблиця 2 Початкові дані для проектування радіозв΄язкових ППОС.
Завдання.1 1)Провести розрахунок повної функціональної схеми підсилювально-перетворювального тракту з цифровою системою АРП. 2) Провести розробку ступені демодуляції з використанням схеми: а) когерентного детектора- варіанти 1,3,5,8,10; б) квадратурного детектора-варіанти 2,4,9; в) детектора ОМ перетворювального типу-варіанти 6,7. Таблиця 3 Початкові дані для проектування радіолокаційних
Завдання 2. Таблиця 4 Початкові дані для проектування радіонавігаційних ППОС
В таблиці 4 прийняті наступні скорочення РЛС: О – обзорна; ОП – обзорно-посадкова; ОД – обзорно -диспетчерська.
Завдання 3. 1) Провести розрахунок повної функціональної схеми пристрою (лінійний тракт, АРП та вузли інформаційного тракту. 2) Розробити схеми з використанням цифрових ІС: а) ступені демодуляції для приймача КРП, ГРП (згідно з розділом цифрової обробки в РН системах); б) системи ЦАРП для приймачів АРК. 3. Скласти електричну схему розрахованого пристрою.
СПИСОК ЛІТЕРАТУРИ. СПИСОК ЛІТЕРАТУРИ 1. ГОРШЕЛЕВ В.Д., КРАСНОЦВЕТОВА З.Г., ФЕДОРОВ Б.Ф. Основы проектирования радиоприемников – Л.: Энергия,1977. – 384 с. 2. СПРАВОЧНИК по учебному проектированию приемо-усилительных устройств /М.Н. Белкин, В.Т. Белинский, Ю.Л. Мазор и др. – К.:Вища шк.. 1988. – 472 с. 3. ПРОЕКТИРОВАНИЕ радиоприемных устройств/Под редакцией А.П. Сиверса. – М.: Сов.радио, 1976 – 488 с. 4. РАДИОПРИЕМНЫЕ устройства (Проектирование РЭА на интегральных микросхемах) /В.Н. Банков, Л.Г. Барулин, М.И. Жодзинский и др./Под ред. Л.Г. Барулина – М.: Радио и связь, 1984 – 272 с. 5. БОГДАНОВИЧ Б.М. РПУ с большим динамическим диапазоном. – М.: Радио и связь, 1984 – 176 с. 6. МАСЛЕННИКОВ В.В., СИРОТКИН А.Д. Избирательные RС – усилители. – М.: Энергия, 1980 – 152 с. 7. ФУНКЦИОНАЛЬНЫЕ устройства на ИМС дифференциального усилителя/Под редакцией В.З. Найдерова. – М.: Сов. Радио, 1977 – 128 с. 8. МИКРОСХЕМЫ и их применение: Справочное пособие /В.А. Батушев, В.Н. Вениаминов, В.Г. Ковалев и др. – М.: Радио и связь, 1983 – 271 с. 9. ШИЛО В.Л. Линейные интегральные схемы в радиоэлектронной аппаратуре. М.: Сов. радио, 1979 – 368 с. 10. ВОЛКОВ В.М., ПОПОВ В.П., СТЕПАНЕНКО В.К. Микроминиатюрные транзисторные усилители. – К.: Техніка, 1973 – 208 с. 11. КЛИЧ С.М. Проектирование СВЧ радиолокационных приемников. – М.: Сов. радио, 1973 – 320 с. 12. ПРОЕКТИРОВАНИЕ радиолокационных приемных устройств: учебное пособие/А.П. Голубков, А.Д. Далматов, А.П. Лукошин и др./Под ред. М.А. Соколова. – М: Высш.шк., 1984 – 335 с. 13. РУДЕНКО В.М., ХАЛЯЛИН Д.Б., МАГНУШЕВСКИЙ Д.Б. Малошумящие входные цепи СВЧ приемных устройств. – М.: Связь, 1971 – 279 с. 14. ДМИТРИЕВ А.В., ИВАНЬКО А.А. Функциональные усилители с большим динамическим диапазоном. Основы теории и проектирования/Под редакцией В.М. Волкова. – М.: Сов.радио, 1976 – 343 с. 15. РАДИОЛОКАЦИОННЫЕ системы летательных аппаратов/Под редакцией П.С. Давыдова. – М.: Транспорт, 1977 – 352 с. 16. ПЕРЕВЕЗЕНЦЕВ Л.Т., ЗЕЛЕНКОВ А.В., ОГАРКОВ В.Н. Радиолокационные системы аэропортов.– М.: Транспорт, 1981–373 с. 17. ОСНОВЫ проектирования радиоэлектронной аппартуры/Под редакцией Б.Ф. Высоцкого. – М.: Сов.радио, 1977 – 350 с. 18. ГРАЧЕВ В.Н., КЕЙН. Радиотехнические средства управления воздушным движением. – М.: Транспорт, 1975 – 344 с. 19. КАЧАН В.К., СОКОЛ В.В. Средства связи пассажирских самолетов. – К.: Вища шк., 1980 – 280 с. 20. СПРАВОЧНИК по полупроводниковым приборам, транзисторам и интегральным схемам. – 5-ое издание/Под редакцией Н.Н. Горюнова. –М.: Энергия, 1979 – 144 с. 21. ИНТЕГРАЛЬНЫЕ микросхемы: справочник/Под редакцией Б.В. Тарабрина. – М.: Энергоатомиздат., 1985 – 528 с. 22. АНАЛОГОВЫЕ и цифровые ИС: справочное пособие/Под редакцией С.В. Якубовского. – М.: Радио и связь, 1985 – 432 с. 23. АНАЛОГОВЫЕ интегральные микросхемы: справочник /Б.П. Кудряшов, Ю.В. Назаров, В.В. Тарабрин, В.А. Ушибишев. – М.: Радио и связь, 1981 – 160 с. 24. БУЛЫЧЕВ А.Л., ГАЛКИН В.И., ПРОХОРЕНКО В.А. Аналоговые ИС: справочник. – Минск: Беларусь, 1985 – 146 с. 25. ПРОЕКТИРОВАНИЕ импульсных и цифровых устройств радиотехнических систем/Под редакцией проф. Б.М. Казаринова. – М.: Высш.шк., 1985 – 319 с. 26. БЕЛЕЦКИЙ А.Я., ПРОКОПЕНКО И.Г., СЕМЕНОВ А.А. Цифровая обработка радиотехнической информации: лабораторные работы. – К.: КИИГА,1983 – 40 с. 27. БЕЛЕЦКИЙ А.Я., КОРНИЛЬЕВ Э.А., ПРОКОПЕНКО И.Г., СЕМЕНОВ А.А. Цифровая фильтрация сигналов в РЭС: учебное пособие. – К.: КИИГА, 1983 – 40 с.
ПРОЕКТУВАННЯ ППОС ДІАПАЗОНІВ ГЕКТОМЕТРОВИХ (ГМХ), ДЕКАМЕТРОВИХ (ДКМХ) І МЕТРОВИХ (МХ) ХВИЛЬ
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-13; просмотров: 346; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.116.85.127 (0.018 с.) |


 fnp, резонансною частотою і мірою придушення перешкоди з частотою сусідньої станції (див. [1,с.294–306]; [2, с.38–45,193]; [3, с.283–296]).
fnp, резонансною частотою і мірою придушення перешкоди з частотою сусідньої станції (див. [1,с.294–306]; [2, с.38–45,193]; [3, с.283–296]). »103…104.
»103…104. кГц має загасання в смузі загородження 30 дБ. Однак зі зниженням частоти розміри цих фільтрів ростуть і при f< 10 МГц їхня перевага помітно втрачається.
кГц має загасання в смузі загородження 30 дБ. Однак зі зниженням частоти розміри цих фільтрів ростуть і при f< 10 МГц їхня перевага помітно втрачається. . Схему АД з ідеальним діодом можна реалізувати і на будь-якому підсилювачі з досить великим підсиленням, наприклад, на диференціальному каскаді (ДК). Приклади схем і деякі розрахункові співвідношення для АМ детекторів можна знайти в роботах [4, с.170], [7, с.86–89]. У кореляційних АМ детекторах детектування проводиться за рахунок перемноження сигналу на самого себе. Ці схеми одержали поширення не дуже давно, після появи ІС аналогового перемножування (АП). Вони являють собою сполучення АП, ФНЧ і схему витягу кореня на ОП.
. Схему АД з ідеальним діодом можна реалізувати і на будь-якому підсилювачі з досить великим підсиленням, наприклад, на диференціальному каскаді (ДК). Приклади схем і деякі розрахункові співвідношення для АМ детекторів можна знайти в роботах [4, с.170], [7, с.86–89]. У кореляційних АМ детекторах детектування проводиться за рахунок перемноження сигналу на самого себе. Ці схеми одержали поширення не дуже давно, після появи ІС аналогового перемножування (АП). Вони являють собою сполучення АП, ФНЧ і схему витягу кореня на ОП. /2, два ОП й один аналоговий диференціальний перемножувач. Через відсутність будь-яких фільтрів вона дозволяє детектувати сигнал при будь-яких співвідношеннях між частотами модулюючого сигналу і несучої.
/2, два ОП й один аналоговий диференціальний перемножувач. Через відсутність будь-яких фільтрів вона дозволяє детектувати сигнал при будь-яких співвідношеннях між частотами модулюючого сигналу і несучої. . У випадку, якщо
. У випадку, якщо  , приймається рішення про наявність цілі, в іншому випадку – про її відсутність. За командою СЗ відбувається зсув інформації в регістрі. При цьому "найстаріший" сигнал, що відповідає останньому з n – радіолокаційних тактів, втрачається. За командою С4 інформація з другого розряду регістра по n-й переписується в ОЗП за адресою, яка утримується ЛА. При зчитуванні цього слова з ОЗП в черговому радіолокаційному такті воно буде розміщено в розрядах регістра з другого по n -й. Отже, слово мовби рухається на один розряд вправо. Такий обмін інформацією між Rg і ОЗП і забезпечує режим "ковзного вікна". За командою С5 зміст ЛА збільшується на одиницю, що забезпечує підготовку до обробки інформації з наступного (старшого по відношенню до обробленого) елемента дальності. Обробка інформації наступного елемента дальності починається з моменту приходу синхроімпульсу С, яким в D-тригері фіксується бінарно-квантований сигнал, що відповідає цьому елементу дальності, а синхрогенератором виробляється послідовність мікрокоманд С1–С5, під керуванням яких відбувається описана процедура обробки інформації. Після обробки інформації в останньому N-му елементі дальності ЛА-обнуляється, а з надходженням наступного ІП процедура обробки послідовно по елементам дальності повторюється відповідно до приведеного алгоритму.
, приймається рішення про наявність цілі, в іншому випадку – про її відсутність. За командою СЗ відбувається зсув інформації в регістрі. При цьому "найстаріший" сигнал, що відповідає останньому з n – радіолокаційних тактів, втрачається. За командою С4 інформація з другого розряду регістра по n-й переписується в ОЗП за адресою, яка утримується ЛА. При зчитуванні цього слова з ОЗП в черговому радіолокаційному такті воно буде розміщено в розрядах регістра з другого по n -й. Отже, слово мовби рухається на один розряд вправо. Такий обмін інформацією між Rg і ОЗП і забезпечує режим "ковзного вікна". За командою С5 зміст ЛА збільшується на одиницю, що забезпечує підготовку до обробки інформації з наступного (старшого по відношенню до обробленого) елемента дальності. Обробка інформації наступного елемента дальності починається з моменту приходу синхроімпульсу С, яким в D-тригері фіксується бінарно-квантований сигнал, що відповідає цьому елементу дальності, а синхрогенератором виробляється послідовність мікрокоманд С1–С5, під керуванням яких відбувається описана процедура обробки інформації. Після обробки інформації в останньому N-му елементі дальності ЛА-обнуляється, а з надходженням наступного ІП процедура обробки послідовно по елементам дальності повторюється відповідно до приведеного алгоритму.
 та
та  – відлік процесу на виході детектора відповідно в "сигнальному" і в "шумовому" елементах дальності, взятих у і –му радіолокаційному такті.
– відлік процесу на виході детектора відповідно в "сигнальному" і в "шумовому" елементах дальності, взятих у і –му радіолокаційному такті. , до інверсного входу компаратора підводиться затриманий на час
, до інверсного входу компаратора підводиться затриманий на час  вхідний процес y(t), тобто процес, відповідний черговому елементу дальності (рис. 3.6).
вхідний процес y(t), тобто процес, відповідний черговому елементу дальності (рис. 3.6).
 )
)
 с =
с =  R /с = 0,65мкс.
R /с = 0,65мкс. с1-с5 =
с1-с5 =  с/6 = 0,108 мкс. Синхроімпульси С можна отримати з імпульсів
с/6 = 0,108 мкс. Синхроімпульси С можна отримати з імпульсів 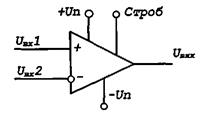
 Рис. 3.8. Схема регістра-накопичувача
Рис. 3.8. Схема регістра-накопичувача