Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Характеристики двигателей при таком переключенииСодержание книги
Поиск на нашем сайте
На рис. 2.36 показаны наиболее часто употребляемые схемы соединений обмотки статора с переключением числа полюсов в отношении 2:1. Схемы, приведенные на рис. 2.36, а и б, обеспечивают переключение при постоянном моменте, а схемы, приведенные на рис. 2.36, в и г, — при приблизительно постоянной мощности. Рассмотрим отношение потребляемых мощностей P 1 и моментов М для рассматриваемых схем при упрощенном предположении, что линейное напряжение U л, ток Iф в каждой полуобмотке фазы статора, КПД ηи cosφ остаются неизменными. При этом для схем, изображенных на рис. 2.36, а и б, имеем
Для схем, изображенных на рис. 2.36, в и г, имеем
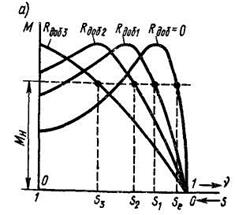
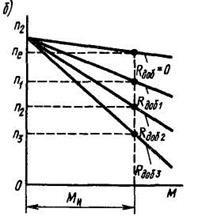
В уравнениях (2.63) и ( 2.64)индексы «1» обозначают меньшую частоту вращения, а индексы «2» — большую частоту вращения. При использовании схем, приведенных на рис. 2.36, в и г, обычно для обеих частот вращения указывают одинаковую мощность, т. е. принимают, что Р 12 = Р 11 и М 2= 0,5M1. Механические характеристики двигателя при переключении полюсов двумя рассмотренными методами приведены на рис. 2.36, д, кривые 1 и 2 — при постоянном моменте, кривые 3 и 4 — при постоянной мощности. Как видно из схем, приведенных на рис. 2.36, при переходе от меньшей частоты вращения к большей изменяется направление тока в половине полуобмоток фаз статора. Для того чтобы направление вращения поля при этом осталось неизменным, необходимо также переключить концы двух фаз обмотки (например, фазы В и С). Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f 1 = 50 Гц частота вращения поля n 1 при переключениях изменяется в отношении 3000:1500:1000:750. Регулирование путем включения реостата в цепь ротора. При включении в цепь ротора добавочных активных сопротивлений R доб1, R доб2, R доб3 и других изменяется форма зависимости М = f (s) и механической характеристики n 2 = f (M)двигателя (рис. 2.37, а). При этом некоторому нагрузочному моменту М н соответствуют скольжения s 1 s 2, s 3,..., большие, чем скольжения sе, при работе двигателя на естественной характеристике (при R доб= 0).
Рис. 2.37 - Изменение формы механической характеристики при регулировании
Частоты вращения с помощью добавочного активного сопротивления
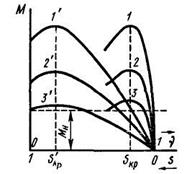
Следовательно, установившаяся частота вращения двигателя уменьшается от nе до n 1, n 2, n 3 ,... (рис. 2.37, б). Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения. Регулирование путем изменения величины питающего напряжения. Для двигателей нормального исполнения такое регулирование неприменимо, так как при уменьшении питающего напряжения резко уменьшается максимальный момент Мmах (рис. 2.38, кривые 1, 2 и 3). Критическое скольжение, определяющее зону устойчивой работы двигателя, остается при этом неизменным: s кр = 0,1 ÷ 0,2. Принципиально рассматриваемый метод можно было бы использовать для регулирования двигателей с большим активным сопротивлением ротора, так как в этом случае скольжение s' кррезко возрастает и максимум момента сдвигается в зону, близкую к s = 1 (кривые 1', 2' и 3'), и даже в область, где s > 1. Однако это ведет к значительному увеличению потерь мощности и снижению КПД, поэтому такой метод регулирования частоты вращения можно применять только в микродвигателях, для которых величина КПД не имеет решающего значения.
Рис. 2.38 - Изменение формы механической характеристики при регулировании частоты вращения путем изменения питающего напряжения
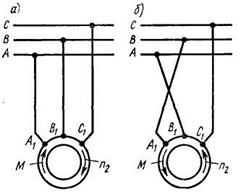
Рис. 2.39 - Схемы включения двигателя при изменении направления вращения Изменение направления вращения. Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. Как следует из § 3.4, для этого необходимо изменить порядок чередования тока в фазах обмотки статора. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из трехфазной сети к фазам этой обмотки (рис. 2.39, а и б).
|
||||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 297; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.116.239 (0.01 с.) |

 . (2.63)
. (2.63) (2.64)
(2.64)