Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
М.Л. Глебова, А.И. Кузнецов, И.Т. Карпалюк,Содержание книги
Поиск на нашем сайте
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ ХАРЬКОВСКАЯ НАЦИОНАЛЬНАЯ АКАДЕМИЯ ГОРОДСКОГО ХОЗЯЙСТВА
М.Л. Глебова, А.И. Кузнецов, И.Т. Карпалюк, М.В. Чернявская ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА (для студентов дневной и заочной форм обучения направления подготовки Электрические системы электроснабжения”, Светотехника и источники света”, Электрический транспорт”)
Учебное пособие
ХАРЬКОВ - ХНАГХ – 2008 УДК 621.313 Авторы: Глебова М.Л., Кузнецов А.И., Карпалюк И.Т., Чернявская М.В. Печатается как учебное пособие по решению Ученого совета ХНАГХ, протокол № 8 от 28.03.2008 г.
Авторы: М.Л. Глебова, А.И. Кузнецов, И.Т. Карпалюк, М.В. Чернявская
Рецензент: д.т.н. проф. В.Б. Финкельштейн
Рекомендовано кафедрой теоретической и общей электротехники, протокол №8 от 13.03.2008 г.
СОДЕРЖАНИЕ
ГЛАВА 1. ОБЩИЕ ВОПРОСЫ ТЕОРИИ ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА
Вал ротора; 9 — вентилятор; 10 — станина
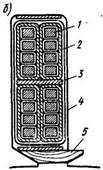
В микромашинах широко применяют также магнитопроводы, собранные из листов железоникелевых сплавов типа пермаллой. Статор асинхронных и большинства синхронных машин состоит из шихтованного магнитопровода, который запрессовывают в литую станину. Поскольку через массивную станину переменный магнитный поток не замыкается, станину можно выполнять из немагнитного материала (алюминия) или ферромагнитного с малой магнитной проницаемостью (чугуна), сравнительно дешевых и хорошо приспособленных к литейной технологии. На внутренней поверхности шихтованного статора, в пазах, располагают обмотку статора. Ротор асинхронной машины обычно состоит из сердечника, набранного из листов электротехнической стали. Сердечник запрессовывают на вал или втулку ротора (при больших размерах машины) и сжимают специальными нажимными шайбами. В пазах, размещенных на наружной поверхности ротора (сходных по форме с пазами статора), располагают обмотку ротора. В синхронных машинах ротор выполняют массивным, так как на нем расположены полюсы с обмотками возбуждения, магнитный поток которых неподвижен относительно ротора. При изготовлении листов ротора и статора в них штампуют пазы для укладки проводников обмотки ротора и статора, а также вентиляционные каналы для прохода охлаждающего воздуха.
Рис. 1.2 - Устройство статора и ротора машины переменного тока: Пакет статора; 2 — станина; 3 — сердечник ротора; 4 — вал
Рис. 1.3 - Листы ротора (а) и статора (б): 1 — лист ротора; 2 — зубец; 3 — паз; 4 — вентиляционный канал; Пазовая изоляция
Рис. 1.5 - Пазы статора открытый (а), полуоткрытый (б) и полузакрытые (в): 1 — проводники; 2 — изоляция слоя; 3 — межслойная изоляция; Изоляция паза; 5 — клин
При укладке проводников в пазы дно и стенки покрывают изоляционным материалом (электрокартоном, лакотканью, миканитом и пр.). Проводники, а также их верхний и нижний слои тоже изолируют друг от друга. Чем выше напряжение, при котором работает машина, тем большую электрическую прочность должна иметь изоляция проводников от сердечника ротора или статора. Проводники укрепляют в пазах ротора и статора с помощью клиньев, а на роторе, кроме того, с помощью проволочных бандажей или стеклобандажей, которые наматывают на лобовые части его обмотки (части обмотки, выходящие из сердечника ротора). В некоторых случаях бандажи располагают и в нескольких местах вдоль сердечника ротора. Для подвода тока к обмотке ротора или подключения к ней реостата на роторе должны быть расположены контактные кольца: три кольца при трехфазном токе и два кольца при постоянном токе. Исключение составляют асинхронные машины с короткозамкнутым ротором, которым контактные кольца не требуются. Токосъем с контактных колец осуществляют с помощью щеток — прямоугольных брусков, изготовленных из смеси угля, графита и порошка металла (меди и свинца). Щетки устанавливают в специальных щеткодержателях и прижимают к контактной поверхности с помощью пружин. Электрические машины мощностью примерно до 2000 кВт имеют шариковые или роликовые подшипники, которые располагают в подшипниковых щитах. При больших мощностях применяют скользящие подшипники. Электрические машины переменного тока — асинхронные и синхронные, несмотря на различия в устройстве и конструкции, имеют много общего в принципе работы и теории. В этих машинах при прохождении по обмоткам статора или ротора переменного тока, синусоидально изменяющегося во времени, создается вращающееся магнитное поле. Это поле, в свою очередь, пересекает обмотки статора и ротора (или одну из них) и наводит в них переменную ЭДС. Общность физических процессов обусловливает общность теории и сходность конструкции многофазных обмоток переменного тока и принципов устройства статора асинхронной машины и якоря синхронной машины.
Рис. 1.6 - Расположение катушек трехфазной обмотки на статоре и образование витка из двух проводников
Полюсное деление τ выражают не только через единицы длины, но и через число пазов: τ = z/(2р), где z — общее число пазов статора или ротора. Если у = τ, шаг называют диаметральным или полным; при у < τ — укороченным, при у > τ — удлиненным. Разность τ — у называют укорочением. Часто шаг выражают в относительных единицах в виде у/τ, а укорочение как (1 — у/τ). Расположенные в соседних пазах стороны катушек одной катушечной группы занимают q пазов и образуют фазную зону с углом α = 2πpq/z. q=z/(2pm). (1.2) Эта величина представляет собой число пазов, приходящихся на полюс и фазу (τ — число фаз). Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки (рис. 1.7); иногда их называют секциями. Катушки укладывают таким образом, чтобы в каждом пазу были размещены одна сторона катушки или две стороны разных катушек — одна над другой. В соответствии с этим различают одной двухслойные обмотки. В обмотке статоракаждая фаза (АХ, BY и CZ) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. В общем случае в трехфазной обмотке на одном полюсном делении расположено 3q пазов. При q = 1 под каждым полюсом расположено только по одной катушке каждой фазы.
Рис. 1.7 - Устройство катушек обмотки статора при однослойной (а) и двухслойной (б) обмотках
Такую обмотку называют сосредоточенной. Как показано ниже, обычно q > 1; при этом обмотку называют распределенной. Обмотки в большинстве случаев выполняют с целым числом пазов на полюс и фазу. При дробном q фазные зоны только в среднем равны π /3 или 2π/3; в реальной машине часть фазных зон меньше, а часть больше этих значений. Однофазные обмотки выполняют с фазной зоной α = 120°, т. е. с заполнением 2/3 пазов, а двухфазные обмотки с α = 90°.
Рис. 1.8 - Схема двухполюсной машины с сосредоточенной обмоткой Рис. 1.9 - Схема двухполюсной машины с распределенной обмоткой Рис. 1.10 - Диаграмма сложения векторов МДС катушек статора При распределенной обмотке Амплитудное значение первой гармонической результирующей МДС F 1= 2R sin (q α / 2 ), где R — радиус окружности, описанной вокруг векторов Таким образом (см. рис. 1.10, а) F1 = (0,9Iw/3)sin(qα/2)sin(α/2), (1.5) или в более общем виде (заменяя число «три» в знаменателе значением q) F1 = 0,9Iw sin(qα/2)[qsin(α/2)]. (1.5,a) Сравнивая (1.5а) и (1.4), можно установить, что амплитуда первой гармонической результирующей МДС при распределенной обмотке отличается от соответствующего значения при сосредоточенной обмотке только множителем kp1 =sin(qα/2)[qsin(α/2)], (1.6) называемым коэффициентом распределения обмотки для первой гармонической. Этот коэффициент равен отношению векторной суммы МДС, создаваемых катушками, расположенными во всех пазах данной фазы, к их алгебраической сумме. При векторном сложении амплитудных значений третьих гармонических МДС катушек ν-й гармонической коэффициент распределения обмотки kpν =sin(qνα/2)[qsin(να/2)], (1.7) где να — угол сдвига между ν-ми гармоническими МДС отдельных катушек. МДС при укорочении шага обмотки. Из приведенных данных следует, что при распределении обмотки происходит сильное ослабление ряда высших гармонических (пятой, седьмой). Но некоторые гармонические ослабляются незначительно. Поэтому часто наряду с распределением применяют укорочение шага обмотки, т. е. расстояние у между сторонами каждой катушки берут меньшим полюсного деления τ. В этом случае обмотку выполняют двухслойной, причем одна сторона каждой катушки находится в нижнем слое, а другая — в верхнем. В качестве примера на рис. 1.11, а показано расположение двухслойной обмотки в пазах двухполюсной машины при q = 3. Обмотка каждой фазы состоит из шести катушек. Стороны первой, второй и третьей катушек лежат в нижних слоях пазов 1, 2 и 3 и в верхних слоях пазов 2', 3' и 4'. Стороны четвертой, пятой и шестой катушек — в верхних слоях 2, 3 и 4 и в нижних слоях пазов 1′, 2' и 3'. Распределение МДС вдоль окружности статора для этой обмотки приведено на рис. 1.11, б.
Рис. 1.11 - Схема двухполюсной машины с двухслойной обмоткой с укороченным шагом и диаграмма распределения ее МДС МДС F xраспределенной обмотки с укороченным шагом можно определить как сумму МДС F' xи F' xдвух распределенных обмоток с диаметральным шагом и числом витков w ' = w /2, сдвинутых относительно друг друга на угол β = π (τ y)/τ. Одна из этих обмоток состоит из трех катушек, расположенных в нижних слоях пазов: 1 — 1′, 2 — 2', 3 — 3'; вторая обмотка — из трех катушек, расположенных в верхних слоях пазов: 2—2', 3 — 3' и 4 — 4'. Амплитуда первой гармонической результирующей МДС F1 находится путем векторного сложения амплитуд первых гармонических МДС F1 = 2F′1 cos(β/2)=0,9Iwkp1ky1,(1.8) где ky1 = cos(β/2) (1.9) — коэффициент укорочения. Для высших гармонических сдвиг по фазе между МДС указанных двух обмоток равен νβ. При этом коэффициент укорочения kyν = cos(νβ/2). (1.9,а) Поскольку для высших гармонических ν> 1, для некоторых из них k у<< 1. Следовательно, укорочение шага обмоток улучшает форму распределения кривой МДС. Выбирая соответствующее укорочение шага обмотки, можно полностью уничтожить одну из высших гармонических, для которой νβ = π. МДС при скосе пазов. В некоторых машинах применяют скос пазов на роторе или статоре на некоторый угол γ. В связи с этим МДС по образующей цилиндра статора постепенно изменяется: если у одного края статора образующая совпадает с осью паза, то затем она постепенно все больше отклоняется от оси этого паза. Скос пазов эквивалентен равномерному распределению обмотки по дуге, соответствующей углу γ. Поэтому, полагая в q α. = γи q sin (α/2) = γ/2, получаем коэффициент скоса пазов для первой и высших гармонических МДС kc1 =(sinγ/2)/(γ/2) и kcν = (sinνγ/2)/(νγ/2). (1.10) Коэффициенты скоса пазов для высших гармонических меньше, чем для первой гармонической, поэтому скос пазов также способствует приближению формы кривой МДС к синусоидальной. Обмоточный коэффициент. Произведение коэффициентов распределения, укорочения шага и скоса пазов называют обмоточным коэффициентом. Следовательно, обмоточный коэффициент для ν-й гармонической kоб ν =kpν kcν kyν. (1.11) Этот коэффициент показывает, насколько уменьшается МДС обмотки переменного тока вследствие ее распределения по нескольким пазам, укорочения шага и скоса пазов по сравнению с сосредоточенной обмоткой. Ниже приведены значения коэффициентов распределения k р, укорочения шага k уи обмоточного коэффициента k об, вычисленных для обмотки, имеющей q = 3; α = 20°; у/τ = 7/9. Распределение обмотки по нескольким пазам, укорочение ее шага и скос пазов позволяют получить приблизительно синусоидальное распределение МДС обмотки вдоль окружности статора (или ротора). Так, например, из данных, приведенных выше, следует, что при q = 3, α = 20° и уτ = 7/9 амплитудные значения высших гармонических МДС весьма малы по сравнению с первой гармонической МДС. Их отношения для пятой, седьмой и девятой гармонических составляют: F5/F1 = (1/5)kоб5/kоб1 = 0,0084; F7/F1 = (1/7)kоб7/kоб1 = 0,025; F9/F1 = (1/9)kоб9/kоб1 = 0,041.
Третья гармоническая МДС имеет наибольшее значение: F3/F1 = (1/3)kоб3/kоб1 = 0,123. Однако, как будет показано создаваемые ею третьи гармонические ЭДС при соединении фазных обмоток электрической машины по схеме «звезда» не оказывают существенного влияния на работу машины и не выходят во внешнюю сеть. Поэтому практически стремятся уменьшить главным образом пятую и седьмую гармонические МДС, применяя шаг обмотки у ≈ 0,8τ.
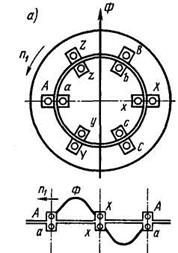
ВРАЩАЮЩЕЕСЯ МАГНИТНОЕ ПОЛЕ Пульсирующее поле. При питаний однофазной обмотки переменным током возникает магнитное поле, пульсирующее во времени с частотой изменения тока. В этом случае при синусоидальном распределении МДС (рис. 1.12) в каждой точке воздушного зазора, расположенной на расстоянии х от оси обмотки, действует МДС Fx = F0 cos(πx/τ) = Fm sinωt cos(πx/τ), (1.12) где F 0 = F msin ωt — МДС в точке, расположенной на оси обмотки. Выражение (1.12) можно преобразовать к виду Fx = 0,5Fm sin(ωt-πx/τ) + 0,5Fm sin(ωt+πx/τ). (1.13) Каждый из членов правой части (1.13) представляет собой уравнение бегущей (или вращающейся) волны МДС. Следовательно, пульсирующее магнитное поле, синусоидально распределенное в пространстве, можно представить в виде суммы двух магнитных полей, вращающихся в противоположных направлениях (рис. 1.13). При этом бегущие волны МДС, создающие эти магнитные поля. F΄x = 0,5Fm sin(ωt-πx/τ); F˝x = 0,5Fm sin(ωt+πx/τ).(1.14)
Рис. 1.12 - Диаграмма распределения МДС в воздушном зазоре (а) и годографы пространственного вектора МДС (б, в)
Рис. 1.13 - Вращающиеся магнитные поля однофазной обмотки
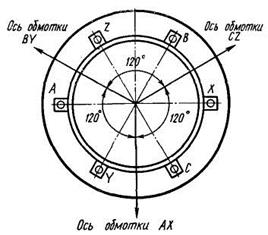
В каждом из этих полей максимальные значения МДС в различные моменты времени остаются неизменными. Следовательно, если каждое из этих полей представить в виде пространственного вектора МДС В качестве положительного направления условно примем направление вращения бегущей волны МДС по часовой стрелке. Координату точки х, в которой МДС F' xмаксимальна и равна 0,5F m, можно получить, положив sin (ωt π х/τ) = 1. При этом ωt — π х/τ = π/2, откуда x=τ(ωT-π/2)/π.(1.15) Следовательно, при увеличении угла ωt координата точки х перемещается в положительном направлении, т. е. МДС F' xвращается по часовой стрелке, a F′' x — против часовой стрелки. Линейная скорость перемещения бегущей волны МДС ν = dx/dt = ωT/π = 2fτ, (1.16) т. е. за один период магнитное поле проходит пару полюсов. Частота вращения бегущей волны МДС (частота вращения магнитного поля) n1 = 60υ/(πD) = 60·2fτ/(πD) = 60f/p. (1.17) Следовательно, изменяя число полюсов электрической машины 2р, можно получать различные частоты вращения магнитного поля. Из (1.17) следует, что в многополюсной машине за один период изменения переменного тока магнитное поле поворачивается на пространственный угол 360°/ p, соответствующий одной паре полюсов. Поэтому при рассмотрении электромагнитных процессов в электрических машинах вводят понятие «электрические градусы», с которыми оперируют при построении векторных диаграмм, проектировании обмоток и пр. При этом 360 временным градусам соответствует 360р электрических градуса, а электрические градусы имеют связь с геометрическими градусами в виде соотношения α˚эл= p α˚геом. Если на статоре электрической машины расположить симметричную трехфазную обмотку (рис. 1.14), у которой оси фаз АХ, BY и CZ сдвинуты в пространстве на угол 120˚, то при питании ее симметричным трехфазным током получим круговое вращающееся магнитное поле. На рис. 1.14 для простоты фазы обмотки показаны сосредоточенными, но распределение МДС, образуемое каждой фазой, следует считать синусоидальным. Ввиду того, что в рассматриваемой обмотке фазы АХ, BY и CZ смещены в пространстве на (2/3) τ, а токи вних сдвинуты во времени на угол (2/3) π, получим следующие выражения для составляющих МДС в точке х от каждой из фаз:
Рис. 1.14 - Расположение обмоток фаз на статоре двухполюсной трехфазной машины
Результирующую МДС в точке х можно получить путем сложения отдельных ее составляющих F xА, F xB, F xC. При этом обратновращающиеся волны МДС исчезают, а результирующая МДС Fx рез = 1,5Fm sin(ωt-πx/τ). (1.18)
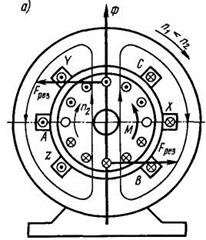
ГЛАВА 2. АСИНХРОННЫЕ МАШИНЫ Рис. 2.1 - Электромагнитная схема асинхронной машины, направления токов и электромагнитного момента при работе в двигательном режиме
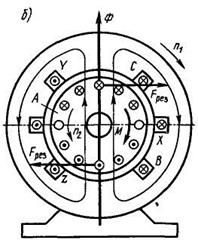
При питании обмотки статора трехфазным током создается вращающееся магнитное поле, частота вращения которого (синхронная) n1 = 60f1/p. Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС. На рис. 2.1, а показано, согласно правилу правой руки, направление ЭДС, индуцированной в проводниках ротора при вращении магнитного потока Ф по часовой стрелке, при этом проводники ротора перемещаются относительно потока Ф против часовой стрелки. Активная составляющая тока ротора совпадает по фазе с индуцированной ЭДС; поэтому условные обозначения (крестики и точки) на рис. 2.1 показывают одновременно и направление активной составляющей тока. На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усилие F рез, приложенное ко всем проводникам ротора, образует электромагнитный момент М, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения п 2соответствует равенству электромагнитного момента тормозному, создаваемому приводимым во вращение механизмом и внутренними силами трения. Такой режим работы асинхронной машины является двигательным и, очевидно, в данном случае 0 ≤ п 2 < п 2. Относительную разность частот вращения магнитного поля и ротора называют скольжением: s = (n1 – n2)/n1. (2.1) Скольжение часто выражают в процентах s = [(n1 – n2)/n1]·100. (2.2) Очевидно, что при двигательном режиме 1 > s > 0. Если ротор асинхронной машины разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля п 1то изменится направление ЭДС в проводниках ротора и активной составляющей тока ротора, т. е. асинхронная машина перейдет в генераторный режим. При этом изменит свое направление и электромагнитный момент М, который станет тормозящим. В генераторном режиме асинхронная машина получает механическую энергию от первичного двигателя, превращает ее в электрическую и отдает в сеть, при этом s < 0. Если изменить направление вращения ротора (или магнитного поля) так, чтобы магнитное поле и ротор вращались в противоположных направлениях, то ЭДС и активная составляющая тока в проводниках ротора будут направлены так же, как в двигательном режиме, т. е. машина будет получать из сети активную мощность. Однако в данном режиме электромагнитный момент М направлен против вращения ротора, т. е. является тормозящим. Этот режим работы асинхронной машины называют режимом электромагнитного торможения. Так как ротор вращается в обратном направлении (относительно направления магнитного поля), то п 2 < 0, a s > 1.
Рис. 2.2 - Электромагнитная схема асинхронной машины, направления токов и электромагнитного момента при работе ее в режимах: генераторном Короткозамыкающие кольца
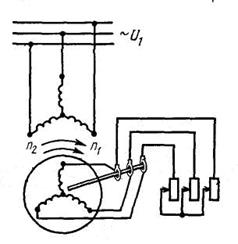
Рис. 2.5 - Схема включения асинхронного двигателя с фазным ротором.
Области применения двигателей различных типов. По конструкции двигатели с короткозамкнутым ротором проще двигателей с фазным ротором и более надежны в эксплуатации (у них отсутствуют кольца и щетки, требующие систематического наблюдения, периодической замены и пр.). Основные недостатки этих двигателей — сравнительно небольшой пусковой момент и значительный пусковой ток. Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты (электроприводы металлообрабатывающих станков, вентиляторов и пр.). Асинхронные двигатели малой мощности и микродвигатели также выполняют с короткозамкнутым ротором. Как показано ниже, в двигателях с фазным ротором имеется возможность с помощью пускового реостата увеличивать пусковой момент до максимального значения и уменьшать пусковой ток. Следовательно, такие двигатели можно применять для привода машин и механизмов, которые пускают в ход при большой нагрузке (электроприводы грузоподъемных машин и пр.).
Рис. 2.7 - Векторные диаграммы асинхронной машины при заторможенном роторе
Поэтому в асинхронной машине, так же как и в трансформаторе, можно считать, что при режимах, близких к номинальному, индуктивные сопротивления Х 1 =Е σ1 /I 1и Х 2 =Е σ2 /I 2не зависят от тока в соответствующих обмотках. Работа машины под нагрузкой. Асинхронную машину с заторможенным ротором можно использовать в качестве трансформатора, если в цепь обмотки ротора (вторичной обмотки) включить сопротивление нагрузки Zн. Векторная диаграмма асинхронной машины с заторможенным ротором (рис. 2.7, б) аналогична диаграмме трансформатора и определяется формально теми же основными уравнениями:
Однако наличие в асинхронной машине вращающегося потока обусловливает некоторые специфические особенности при взаимодействии токов в первичной и вторичной обмотках. Поскольку фазы обмотки ротора сдвинуты в пространстве, а токи в них имеют временной сдвиг, они создают бегущую волну МДС ротора F 2, частота вращения которой
где ƒ 2 и р 2— частота тока и число пар полюсов ротора. Так как при неподвижном роторе ЭДС в обмотках статора и ротора имеют одинаковую частоту, т. е. ƒ 2 = ƒ 1; то
Асинхронная машина может работать только при равенстве частот вращения бегущих волн МДС статора F 1 и ротора F 2. Следовательно, статор и ротор должны иметь одинаковое число полюсов, т. е. р 1 = р 2 = р. При этом условии бегущие волны МДС ротора и статора неподвижны одна относительно другой и взаимодействуют между собой, обеспечивая передачу мощности из статора в ротор так же, как и в трансформаторе. В результате ток ротора I 2 создает компенсирующую его составляющую тока статора I' 2и результирующий магнитный поток остается примерно таким же, как и при режиме холостого хода. Таким образом, для асинхронной машины, как и для трансформатора, справедливо условие Ф ≈ const, т. е. магнитный поток при изменении режима работы изменяется мало. Требование равенства частот вращения бегущих волн МДС ротора и статора жестко определяет лишь равенство числа полюсов. Число фаз обмоток статора и ротора может быть любым. Если выбор числа фаз т 1обмотки статора определен питанием ее от трехфазной (в двигателях общепромышленного применения) или двухфазной (в микродвигателях) сети переменного тока, то число фаз т 2обмотки ротора выбирают при проектировании машины, исходя из удобств конструкции и технологии изготовления ротора, т. е. можно выполнить ее многофазной в виде беличьей клетки, у которой т 2равно числу стержней z 2 клетки. В такой обмотке отдельные «фазы» сдвинуты одна относительно другой на угол α = 2 π/Z 2, а число nap полюсов р 2всегда равно числу пар полюсов р 1 вращающегося магнитного поля. Схема замещения (рис. 2.8). Эта схема аналогична схеме замещения трансформатора, но ее параметры определяются другими коэффициентами приведения. Полагая Е' 2 = E 1 = k Е Е 2, из условия равенства мощностей реального и приведенного роторов т 2 Е 2 I 2 = m 1 E' 2 I 2находим
Величину ki = m 1 w 1 k oбl /(m 2 w 2 k об2 ) называют коэффициентом приведения (трансформации) токов. Из равенства электрических потерь m 2 I 22 R 2= т 1 I'22R' 2получаем
Из равенства относительных индуктивных падений напряжений I 2 Х 2 /Е 2= I' 2 Х' 2 /Е' 2находим
Величину k Е k iназывают коэффициентом приведения сопротивлений. При определении коэффициентов k Еи ki для короткозамкнутой обмотки типа беличья клетка принимают w2 = 0,5; m 2 = z 2и k об2 = 1. Таким образом, теория работы асинхронной машины с заторможенным ротором в основном подобна теории работы трансформатора. Однако использование асинхронной машины в качестве трансформатора обычно нецелесообразно, так как она значительно дороже трансформатора и имеет худшие эксплуатационные характеристики (больший ток холостого хода, меньший КПД и пр.).
Рис. 2.8 - Схема замещения асинхронной машины при заторможенном роторе
Только в некоторых специальных устройствах асинхронную машину используют в режиме работы трансформатора, т. е. при заторможенном роторе. Области применения асинхронной машины с заторможенным ротором. Рассмотренный режим работы используют в фазорегуляторах и индукционных регуляторах. Фазорегулятор. Если ротор трехфазной асинхронной машины установлен в положении (рис. 2.9, а), при котором оси одноименных фаз ротора и статора совпадают, то вращающийся магнитный поток пересекает обмотки статора и ротора одновременно. Следовательно, ЭДС E 1и Е 2имеют одинаковую фазу. Если повернуть ротор навстречу магнитному потоку на угол α (рис. 2.9, б), то магнитный поток будет сначала набегать на фазу ах ротора, а потом на фазу АХ статора. Вследствие этого ЭДС Е 2будет опережать E1по фазе на угол α. Поворачивая ротор в одну или другую сторону, можно получить требуемую фазу ЭДС: e2 = E2msin(ωt±α). Асинхронные фазорегуляторы (рис. 2.9, в) используют главным образом в схемах автоматики для компенсации фазовой погрешности, в управляемых выпрямителях, устройствах для испытаний электроизмерительных приборов и пр. Промышленность выпускает миниатюрные фазорегуляторы с одной обмоткой на роторе. Поворот ротора осуществляют с помощью червячного редуктора с самоторможением.
Рис. 2.9 - Схематический разрез (а, б) и схема (в) фазорегулятора: Рис. 2.10 - Схема и векторная диаграмма напряжений Рис. 2.11 - Схема и векторная диаграмма напряжений сдвоенного трехфазного индукционного регулятора: Рис. 2.12 - Энергетическая диаграмма асинхронной машины
Из формулы (2.20) имеем M = ΔPэл2/(ω1s); (2.21) s = ΔPэл2/(Mω1) = ΔPэл2/Pэм. (2.22) Формулы (2.21) и (2.22) позволяют произвести анализ важнейших свойств асинхронного двигателя, а именно — установить связь между скольжением и КПД, а также зависимость электромагнитного момента от параметров машины и режима ее работы. Связь между скольжением и КПД. Представим КПД асинхронного двигателя в виде η = P2/P1 = (Pэм/P1)(P2/Pэм) = η1η2, (2.23) где η1 и η2 — КПД ста
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 293; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.41.108 (0.013 с.) |


 Электрические машины переменного тока. Учебное пособие для студентов дневной и заочной форм обучения направления подготовки 6.090603 - “Электрические системы электроснабжения”, 6.090605 - “Светотехника и источники света”, 6.092204 - “Электрический транспорт” - Харьков: ХНАГХ, 2008.- 99 с.
Электрические машины переменного тока. Учебное пособие для студентов дневной и заочной форм обучения направления подготовки 6.090603 - “Электрические системы электроснабжения”, 6.090605 - “Светотехника и источники света”, 6.092204 - “Электрический транспорт” - Харьков: ХНАГХ, 2008.- 99 с.







 п11,
п11, 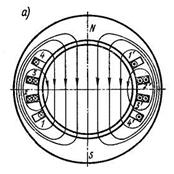

 и
и  указанных обмоток (рис. 1.11, в), значение которых при максимальном значении тока в фазе равно F′ 1 = F′' 1 = 0, 45Iwk р1. При этом
указанных обмоток (рис. 1.11, в), значение которых при максимальном значении тока в фазе равно F′ 1 = F′' 1 = 0, 45Iwk р1. При этом

 (рис. 1.12, б), то конец его будет описывать окружность. Такое поле называют круговым.
(рис. 1.12, б), то конец его будет описывать окружность. Такое поле называют круговым. ;
; ;
; .
.
 ;
; ;
; . (2.7)
. (2.7) = 60f2/p2, (2.8)
= 60f2/p2, (2.8) . (2.9)
. (2.9) . (2.10)
. (2.10) . (2.10,а)
. (2.10,а)