Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Короткозамкнутый виток; 4 — ротор; 5 — полюсСодержание книги
Поиск на нашем сайте
Угол γ 2значительно больше (около 45°), т. е. такой, как в трансформаторе со вторичной обмоткой, замкнутой накоротко (например, в измерительном трансформаторе тока). Это объясняется тем, что потери мощности, от которых зависит угол γ 2, определяются не только магнитными потерями мощности в стали, но и электрическими потерями в короткозамкнутом витке. Потоки Фп1 и Фп2, смещенные в пространстве на угол β и сдвинутые по фазе во времени на угол γ= γ2— γ1, образуют эллиптическое вращающееся магнитное поле, которое создает вращающий момент, действующий на ротор двигателя в направлении от первого полюсного наконечника, не охватываемого короткозамкнутым витком, ко второму наконечнику (в соответствии с чередованием максимумов потоков «фаз»). Для увеличения пускового момента рассматриваемого двигателя путем приближения его вращающегося поля к круговому применяют различные способы: устанавливают между полюсными наконечниками смежных полюсов магнитные шунты, которые усиливают магнитную связь между основной обмоткой и короткозамкнутым витком и улучшают форму магнитного поля в воздушном зазоре; увеличивают воздушный зазор под наконечником, не охватываемым короткозамкнутым витком; используют два и большее количество короткозамкнутых витков на одном наконечнике с разными углами охвата. Имеются также двигатели без короткозамкнутых витков на полюсах, но с несимметричной магнитной системой: различной конфигурацией отдельных частей полюса и разными воздушными зазорами. Такие двигатели имеют меньший пусковой момент, чем двигатели с экранированными полюсами, но КПД их выше, так как у них отсутствуют потери мощности в короткозамкнутых витках. Рассмотренные конструкции двигателей с экранированными полюсами являются нереверсивными. Для осуществления реверса в таких двигателях вместо короткозамкнутых витков применяют катушки В1, В2, ВЗ и В4 (рис. 2.65, в), каждая из которых охватывает половину полюса. Замыкая накоротко пару катушек В1 и В4 или В2 и ВЗ, можно экранировать одну или другую половину полюса и изменять таким образом направление вращения магнитного поля и ротора. Двигатель с экранированными полюсами имеет ряд существенных недостатков: сравнительно большие габаритные размеры и массу; низкий cosφ ≈ 0,4 ÷ 0,6; низкий КПД η = 0,25 ÷ 0,4 из-за больших потерь в короткозамкнутом витке; небольшой пусковой момент и др. Достоинствами двигателя являются простота конструкции и вследствие этого высокая надежность в эксплуатации. Благодаря отсутствию зубцов на статоре шум двигателя незначителен, поэтому он часто употребляется в устройствах по воспроизводству музыки и речи.
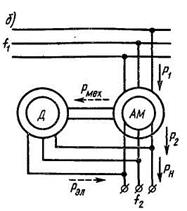
АСИНХРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ Асинхронная машина с фазным ротором может служить преобразователем частоты, так как в ее роторе частота тока f2 = f1s = p(n1 ± n2)/60. (2.103) При этом знак «–» соответствует вращению ротора в направлении вращения поля, а знак «+» — против вращения поля. Асинхронный преобразователь частоты (рис. 2.66) состоит из асинхронной машины AM с фазным ротором и соединенного с ней приводного двигателя Д — асинхронного или синхронного. Одна из обмоток машины AM (например, обмотка статора) подключается к трехфазной сети с частотой f 1; от другой обмотки (ротора) получают переменный ток с частотой f 2 = f 1 s. Для получения частоты f 2 > f 1 ротор асинхронной машины приводят во вращение в направлении, противоположном вращению поля. При этом преобразователь частоты работает в режиме электромагнитного торможения при s > 1, а двигатель передает ему мощность Р мех. Направления первичной Р 1и вторичной Р 2мощностей преобразователя частоты, механической Р мех и электрической Р элмощностей приводного двигателя и мощности Р и,подаваемой на нагрузку, для рассматриваемого режима показаны на рис. 2.66, а сплошными стрелками.
Рис. 2.66 - Схемы асинхронного преобразователя частоты при подключении приводного двигателя к сети (а), к выходу преобразователя частоты (б)
Для получения частоты f 2 < f 1 преобразователь частоты должен работать в режиме двигателя и вращаться в направлении вращения поля. При этом он тормозится электромагнитным моментом машины Д, работающей в генераторном режиме. Эта машина отдает электрическую энергию в ту же сеть, от которой питается преобразователь частоты AM (рис. 2.66, а) или цепь его ротора (рис. 2.66, б). Направления мощностей Р мех, P эл и Р идля рассматриваемого режима показаны на рис. 2.66, а штриховыми стрелками. Если приводным двигателем служит асинхронная машина (рис. 2.66, а), то частота выходного напряжения f2 = (pд ± pпч)f1/pд, (2.104) где р пчи р д — числа пар полюсов машины AM и Д. При этом знаки «+» и «–» относятся соответственно к режиму работы преобразователя частоты AM в режимах электромагнитного тормоза (f 2 > f 1) и двигателя (f 2 < f 1). Если пренебречь потерями мощности в машине Д (считать, что P эл = Р мех), а также потерями мощности в статоре и стали в машине AM (считать, что P 1 = Р эм), то при включении машин по схеме, приведенной на рис. 2.66, а, Pн = P2 = P1s; Pмex = (1-s)P1 = [(1–s)/s]Pн, а при включении по схеме, приведенной на рис. 2.66, б, Pн = P2 + Pмex = P1; Pмex = (1-s)P1 = (1–s)Pн. Для плавного регулирования частоты f 2 необходимо регулировать частоту вращения приводного двигателя Д, например, используя двигатель постоянного тока.
|
||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 348; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.237.229 (0.007 с.) |