Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизированные системы управления технологическими процессамиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Развитие экономико-математических методов управления с широким использованием современной вычислительной техники позволило существенно облегчить работу оператора при управлении сложными технологическими объектами. В результате появились человеко-машинные системы управления технологическими процессами, в которых обработка информации и формирование оптимальных управлений осуществляются человеком с помощью управляющей вычислительной машины (УВМ). УВМ в этом случае является многоканальным информационно-управляющим устройством в системе автоматизированного управления технологическим процессом.
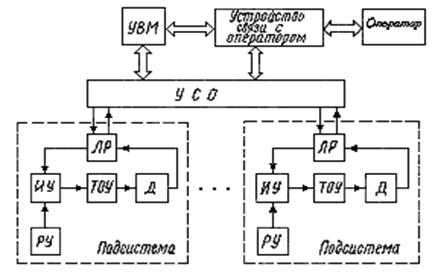
Рисунок 1.3 – Типовая структура централизованной АСУ ТП В зависимости от распределения информационных и управляющих функций между человеком и УВМ, между УВМ и средствами контроля и регулирования возможны различные принципы построения АСУ ТП. Наибольшее распространение в промышленной практике нашли три принципа построения АСУ ТП: централизованные АСУ ТП, АСУ ТП с супервизорным управлением и децентрализованные распределенные АСУ ТП. Типовая структура централизованной АСУ ТП (рис.1.3) включает в себя устройство связи с объектом (УСО) и УВМ, осуществляющую централизованное управление одним или несколькими технологическими процессами. Надежность всего комплекса определяется в этом случае надежностью УСО и УВМ, и при выходе их из строя нормальное функционирование технологического оборудования невозможно. Характерным примером централизованной АСУ ТП является система, УВМ которой непосредственно вырабатывает оптимальные регулирующие воздействия и с помощью соответствующих преобразователей передает команды управления на исполнительные устройства (механизмы). Централизованные АСУ ТП, УВМ которых работают в таком режиме, называются системами с непосредственным или прямым цифровым управлением (ПЦУ). В АСУ ТП с ПЦУ оператор должен иметь возможность изменять уставки, контролировать избранные переменные, варьировать диапазоны допустимого изменения переменных, изменять параметры настройки и иметь доступ к управляющей программе. Для обеспечения этих функций необходимо иметь сопряжение (человек-машина) в виде пульта оператора и средств отображения информации. Применение УВМ в режиме ПЦУ позволяет строить программным путем системы регулирования по возмущению, комбинированные системы каскадного и многосвязного регулирования, учитывающие связи между отдельными частями объекта управления. ПЦУ позволяет реализовать не только оптимизирующие функции, но и адаптацию к изменению внешней среды и переменным параметрам объекта. В системах с ПЦУ упрощается реализация режимов пуска и остановки процессов, переключение с ручного управления на автоматическое, операции переключения исполнительных механизмов. Главный недостаток систем с ПЦУ заключается в том, что при отказе в работе УВМ объект теряет управление. Несмотря на высокую надежность всех средств системы, отказы в УВМ возможны, и это обстоятельство необходимо особо учитывать при построении АСУ ТП с ПЦУ. Более широкими возможностями и лучшей надежностью обладают АСУ ТП, в которых непосредственное регулирование объектами ТП осуществляют ЛР, а УВМ выполняет функции «советчика» в так называемом супервизорном режиме. Типовая структура супервизорной АСУ ТП изображена на рис.1.4. По данным, поступающим от датчиков (Д) локальных подсистем через УСО, УВМ вырабатывает значение уставок в виде сигналов, поступающих непосредственно на входы систем автоматического регулирования. Основная задача супервизорного управления – автоматическое поддержание процесса вблизи оптимальной рабочей точки. Кроме того, супервизорное управление позволяет оператору-технологу использовать плохо формализуемую информацию о ходе технологического процесса, вводя через УВМ коррекцию уставок, параметров алгоритмов регулирования в локальные контуры. Например, оператор вводит необходимые изменения в управление процессом при изменении сырья и состава вырабатываемой продукции. Это требует определения новых значений коэффициентов уравнений математической модели объекта управления, что может выполняться любой другой внешней ЭВМ или самой УВМ, если она не загружена. Работа информационно-измерительной части системы супервизорного управления практически не отличается от рассмотренной выше системы. Функции оператора в этом случае сводятся лишь к наблюдению, а его вмешательство необходимо только в аварийных ситуациях.
Рисунок 1.4 – Типовая структура АСУ ТП с супервизорным режимом работы УВМ Достоинство системы супервизорного управления состоит в том, что УВМ в ней не только автоматически контролирует процесс, но и автоматически управляет им вблизи оптимальной рабочей точки. Рассматриваемая система управления технологическим процессом является многоканальной как в информационной части, так и на уровне оптимизации. Контрольные вопросы 1. Дайте определение понятиям АСУ ТП и АТК. 2. Опишите обобщенную блок-схему АСУ ТП и выполняемые системой типовые функции. 3. Опишите типовую структуру ЛСКРУ. 4. Опишите типовую структуру АСУ ТП с супервизорным режимом работы.
План практического занятия 1. Для заданного преподавателем технологического объекта (производства) выбрать соответствующую структуру АСУ ТП.
Рекомендуемая литература 1. Проектирование систем автоматизации технологических процессов: Справ.пособие / [А.С. Клюев, Б.В. Глазов, А.Х. Дубровский, А.А. Клюев]; Под ред. А.С. Клюева. – М.: Энергоатомиздат, 1990. – 464 с.: ил. 2. Родионов В.Д., Терехов В.А., Яковлев В.Б. Технические средства АСУ ТП: Учеб. пособие для вузов / Под ред. В.Б. Яковлева. – М.: Высш. шк., 1989. с.29-72. 3. Эм Г.А. Элементы систем автоматики: Учеб. пособие. – Караганда, КарГТУ, 2007. С.22-27. Контрольные задания для СРС [1-3] 1. Подготовить ответы на контрольные вопросы. 2. Проанализировать современное состояние и перспективы развития современных автоматизированных систем управления технологическими процессами. Практическая работа №2
|
||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 1447; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.175.167 (0.007 с.) |