Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регулирование скорости посредством ослабления поляСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Регулирование n посредством ослабления поля производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением R ш.в (рисунок 2, а), либо уменьшением числа включенных в работу витков обмотки возбуждения. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения. Так как сопротивление обмотки возбуждения R в и падение напряжения на нем малы, то R ш.в также должно быть мало. Потери в сопротивлении R ш.в поэтому малы, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого коэффициент полезного действия (к. п. д.) двигателя остается высоким, и такой способ регулирования широко применяется на практике. При шунтировании обмотки возбуждения ток возбуждения со значения I уменьшается до
и скорость n соответственно увеличивается. Выражения для скоростной и механических характеристик при этом получим, если в равенствах (2) и (3) заменим k Ф на k Ф k о.в, где
представляет собой коэффициент ослабления возбуждения. При регулировании скорости изменение числа витков обмотки возбуждения k о.в = w в.раб / w в.полн. На рисунке 3 показаны (кривые 1, 2, 3) характеристики n = f (M) для этого случая регулирования скорости при нескольких значениях k о.в (значению k о.в = 1 соответствует естественная характеристика 1, k о.в = 0,6 – кривая 2, k о.в = 0,3 – кривая 3). Характеристики даны в относительных единицах и соответствуют случаю, когда k Ф = const и R а* = 0,1.
24.Общие принципы регулирование скорости двигателя постоянного тока Способы регулирования скорости двигателей постоянного тока можно определить, рассматривая уравнение механической характеристики:
Для двигателя независимого возбуждения возможны три способа регулирования: Изменение питающего напряжения U. При этом способе изменяется скорость идеального холостого хода
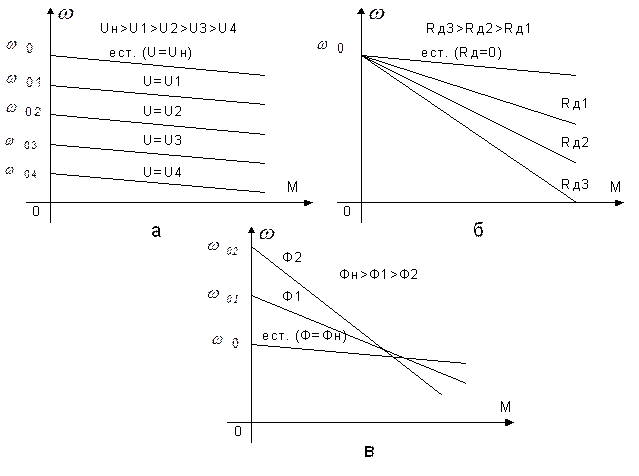
Рисунок 6.4 - Механические характеристики двигателя независимого возбуждения при регулировании скорости за счет изменения питающего напряжения (а), реостатном регулировании (б) и регулировании за счет ослабления магнитного потока (в) Изменение сопротивления якорной цепи rЯ. При этом скорость идеального холостого хода остается постоянной, а изменяется угол наклона механической характеристики. Регулирование происходит ступенчато, точность регулирования зависит от числа ступеней реостата в якорной цепи. Энергетическая эффективность при таком способе невелика, так как значительная мощность рассеивается на сопротивлении реостата. Механические характеристики двигателя при этом способе регулирования приведены на рисунке 6.4, б. Изменение магнитного потока машины Ф. Изменение магнитного потока происходит за счет регулирования тока возбуждения двигателя. Так как ток возбуждения двигателя значительно меньше тока якоря, то реализовать этот способ легче реализовать, чем первый, так как регулируемые источники питания малой мощности достаточно просты и доступны. Однако практически все машины постоянного тока в номинальном режиме работают при насыщенной магнитной системе. То есть при увеличении тока возбуждения магнитный поток будет возрастать очень незначительно, в то время как ток возбуждения может достигнуть недопустимых значений. Поэтому изменение магнитного потока машины можно производить только в сторону ослабления поля. При этом скорость будет возрастать выше основной, а характеристики иметь вид аналогичный характеристикам двигателя последовательного возбуждения (рисунок 6.4, в). Этот способ зачастую применяется в комбинации с первым для расширения диапазона регулирования.
25. регулирование скорости двигателя постоянного тока параллельного возбуждения изменением напряжения Регулирование скорости посредством изменения напряжения якоря может осуществляется с помощью агрегата "генератор – двигатель" (Г – Д), называемого также агрегатом Леонарда (рисунок 4). В этом случае первичный двигатель ПД (переменного тока, внутреннего сгорания и тому подобный) вращает с постоянной скоростью генератор постоянного тока Г. Якорь генератора непосредственно подключен к якорю двигателя постоянного тока Д, который служит приводом рабочей машины РМ. Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от независимого источника – сети постоянного тока (рисунок 4) или от возбудителей (небольших генераторов постоянного тока) на валу первичного двигателя ПД. Регулирование тока возбуждения генератора i в.г должно производиться практически от нуля (на рисунке 4 с помощью реостата, включенного по потенциометрической схеме). При необходимости реверсирования двигателя можно изменить полярность генератора (на рисунке 4 с помощью переключателя П).
Рисунок 4. Схема агрегата "генератор – двигатель" для регулирования скорости двигателя независимого возбуждения Пуск двигателя Д и регулирование его скорости осуществляют следующим образом. При максимальном i в.д и i в.г = 0 производят пуск первичного двигателя ПД. Затем плавно увеличивают i в.г, и при небольшом напряжении генератора U двигатель Д придет во вращение. Регулируя, далее, U в пределах до U = U н, можно получить любые скорости вращения двигателя до n = n н. Дальнейшее увеличение n возможно путем уменьшения i в.д. Для реверсирования двигателя уменьшают i в.г до нуля, переключают ОВГ и снова увеличивают i в.г от значения i в.г = 0. Когда рабочая машина создает резко пульсирующую нагрузку (например, некоторые прокатные станы) и нежелательно, чтобы пики нагрузки полностью передавались первичному двигателю или в сетьпеременного тока, двигатель Д можно снабдить маховиком (агрегат Г – Д – М, или агрегат Леонарда – Ильгнера). В этом случае при понижении n во время пика нагрузки часть этой нагрузки покрывается за счет кинетической энергии маховика. Эффективность действия маховика будет больше при более мягкой характеристике двигателя ПД или Д. В последнее время все чаще двигатель ПД и генератор Г заменяют полупроводниковым выпрямителем с регулируемым напряжением. В этом случае рассматриваемый агрегат называют также вентильным (тиристорным) приводом. Рассмотренные агрегаты используются при необходимости регулирования скорости вращения двигателя с высоким к. п. д. в широких пределах – до 1: 100 и более (крупные металлорежущие станки, прокатные станы и так далее). Отметим, что изменение U с целью регулирования n по схеме рисунка 1, б, показанного в статье "Общие сведения о генераторах постоянного тока" и рисунка 3, а, не дает желаемых результатов, так как одновременно с изменением напряжения цепи якоря изменяется пропорционально U также ток возбуждения. Так как регулирование U можно производить только от значения U = U н вниз, то вскоре магнитная цепь окажется насыщенной, вследствие чего U и i в будут изменяться пропорционально друг другу. Согласно равенству (7), представленному в статье "Общие сведения о двигателях постоянного тока"), n при этом существенным образом не меняется. В последнее время все больше распространяется так называемое импульсное регулирование двигателей постоянного тока. При этом цепь якоря двигателя питается от источника постоянного тока с постоянным напряжением через тиристоры, которые периодически, с частотой 1 – 3 кГц включаются и отключаются. Чтобы сгладить при этом кривую тока якоря, на его зажимах подключаются конденсаторы. Напряжение на зажимах якоря в этом случае практически постоянно и пропорционально отношению времени включения тиристоров ко времени продолжительности всего цикла. Таким образом, импульсный метод позволяет регулировать скорость вращения двигателя при его питании от источника с постоянным напряжением в широких пределах без реостата в цепи якоря и практически без дополнительных потерь. Таким же образом, без пускового реостата и без дополнительных потерь, может производиться пуск двигателя. Импульсный способ регулирования в экономическом отношении весьма выгоден для управления двигателями, работающими в режимах переменной скорости вращения с частыми пусками, например на электрифицированном транспорте.
|
||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 1354; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.009 с.) |



 .
. , а наклон механической характеристики не изменяется. Это наиболее эффективный способ регулирования, так как он обеспечивает наибольший диапазон регулирования (wмин / wмакс) и лучшие энергетические характеристики (к. п. д.). Регулирование происходит плавно, то есть точность регулирования может быть очень высока. Этот метод имеет один недостаток – требуется регулируемый источник питания в цепи якоря. Механические характеристики двигателя при этом способе регулирования приведены на рисунке 6.4, а.
, а наклон механической характеристики не изменяется. Это наиболее эффективный способ регулирования, так как он обеспечивает наибольший диапазон регулирования (wмин / wмакс) и лучшие энергетические характеристики (к. п. д.). Регулирование происходит плавно, то есть точность регулирования может быть очень высока. Этот метод имеет один недостаток – требуется регулируемый источник питания в цепи якоря. Механические характеристики двигателя при этом способе регулирования приведены на рисунке 6.4, а.