Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Понятие линии влияния. Использование линии влияния при расчете сооружений на подвижные нагрузки.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Линия влияния – это график, показывающий зависимость определяемой величины от положения на сооружении единичного подвижного груза постоянного направления. Р – передвигающийся по всей балке единичный безразмерный груз. Необходимо найти положение подвижной нагрузки, при котором определенное усилие имеет экстремальное значение - опасное.
Линии влияния строятся двумя способами статическим и кинематическим. При статическом методе используется статика, метод сечений. При построении линий влияния внутренних сил рассматривается положение груза слева и справа от расчетного сечения, соответственно получаем левые и правые линии влияния. Сущность кинематического метода: - отображается та связь, усилие в которой определяется. Получили механизм; - взамен отброшенной связи прикладывается искомое усилие положительного направления; - полученному механизму даем возможные перемещения в направлении искомого усилия; - применяется принцип возможных перемещений: сумма работ всех действующих сил возможных перемещений равно нулю. Определение усилий по линии влияния и заданной постоянной нагрузке. 1. Действие сосредоточенных сил Р. Sк – определяемое усилие (R, Q, M); yi – величина усилия Sк, когда единичный груз находится в сечении действия силы Рi. Sк = 2. Действие распределенной нагрузки q. Sк = q* 3. Действие сосредоточенного момента Sк = М*tg где Момент положителен по ходу часовой стрелки. При одновременном действии всех нагрузок используется принцип независимости сил, все формулы объединяются: Sк = 6.Понятие ферм, признаки их статической неопределимости, определимости, основные способы определения усилий в стержнях ферм. Расчёт плоских ферм. Ферма- стержневая система, у которой во всех узлах шарнирыи при этом она остаётся геометрически неизменяемой. Степень статической неопределимости ферм: n=C+Cо-2У, где У-число узлов фермы.С-число стержней. Со-число опорных стержней. Определение степени свободы для ферм:W=2У-С-Со.
Основные способы определения усилий в стержнях ферм: 1)Способ моментных точек 2)Способ проекций 3)Способ вырезания узлов Если невомзожен 1 способ то использ-ся 2,если же 2 способ неприменим, то используется 3 способ.
-способ проекций(моментные точки в бесконечности) суммаYлев=Ra+Nsina=0
Статически неопределимые стержневые системы, определение степени статической неопр-ти, св-ва статически неопределимых систем. Сущность метода сил. Основные способы проверки правильности построения эпюр. Стержневые системы - системы, состоящие из отдельных, обычно прямолинейных, соединенных между собой в узлах с помощью сварки, заклепок, болтов и других скреплений; одним из таких видов систем являются плоские фермы. При расчете статически неопределимых рам определяют реакции опорных связей и внутренних усилий. Они принимаются за неизвестные. Если уравнений статики недостаточно для определения этих неизвестных, то система статически неопределима. Свойства стат. неопределимых систем: - распределение усилий между элементами зависит от материала этих элементов и их размеров; - изменение температуры, смещение опорных связей, неточность изготовления элементов и последующей сборки все это приводит к появлению дополнительных усилий и напряжений. Расчет статически неопределимых систем начинают с определения статической неопределимости – это число лишних связей, удаление которых превращает заданную стат. неопределимую раму в стат. определимую и геометрически неизменяемую. Для рам степень статической неопределимости: n=3m – Ш, Ш – число простых шарниров (соединяет 2 стержня или 2 диска);
Задана стат. неопределимая рама. n=3*2 – 3 = 3 раза стат. неопределима. Раскрытие статической неопределимости любой рамы методом сил начинается с отбрасывания дополнительных связей. Система, освобожденная от дополнительных связей, становится статически определимой. Она носит название основной системы. Основная система метода сил – это статически определимая и геометрически неизменяемая система, полученная из заданной системы удалением лишних связей.
После того как дополнительные связи отброшены и система превращена в статически определимую, необходимо ввести вместо связей неизвестные силовые факторы. В тех сечениях, где запрещены линейные перемещения, вводятся силы. Там, где запрещены угловые смещения, вводятся моменты. Как в том, так и в другом случае неизвестные силовые факторы обозначают Xi-, где i — номер неизвестного. Наибольшее значение i равно степени статической неопределимости системы. Заметим, что для внутренних связей силы Xi, — являются взаимными. Если в каком-либо сечении рама разрезана, то равные и противоположные друг другу силы и моменты прикладываются как к правой, так и к левой частям системы. Эквивалентная система – это основная система, загруженная реакциями отброшенных связей и заданной нагрузкой. Она д. б. тождественна заданной раме статически (внутр. силы одинаковы) и кинематически (перемещение точек д. б. одинаковыми)
Применяем принцип независимости сил и их сложения:
Записываем канонические уравнения метода сил. Число уравнений равно степени статич. неопределимости. Каждое уравнение это отрицание перемещений по направлению отброшенных связей.
Далее решаем каноническое уравнение. Для этого основную систему загружаем по отдельности единичными неизвестными по отдельности и строим эпюра единичных изгибаемых моментов. Находим коэффициенты при неизвестных:
Строим эпюру изгибающих моментов для заданной рамы: М= Способы проверки. Окончательная эпюра моментов проверяется дважды статически (явл. необходимой, но недостаточной) и кинематически. Статическая – любой узел рамы должен находиться в равновесии, т. е. сумма моментов любого узла =0. Кинематическая – проверяется отсутствие перемещений по направлению неизвестных (отброшенных связей). Сколько неизвестных столько и проверок:
Можно сделать суммарную проверку, т.е. отсутствие перемещений по направлению сразу всех неизвестных:
|
||||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 2125; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.50.94 (0.008 с.) |

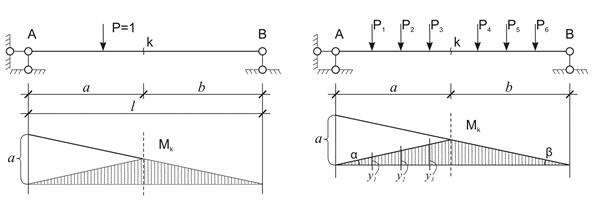
 Pi*yi
Pi*yi , где
, где 
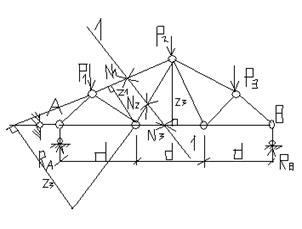 -способ моментных точек:
-способ моментных точек: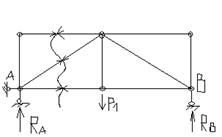 СуммаМк1=-N1*r1-Ra*d+P1*d/2=0,отсюда находим N1.
СуммаМк1=-N1*r1-Ra*d+P1*d/2=0,отсюда находим N1.
 m – число замкнутых контуров в системе в предположении отсутствия шарнирных соединений;
m – число замкнутых контуров в системе в предположении отсутствия шарнирных соединений; Теперь составим уравнения совместности перемещений:
Теперь составим уравнения совместности перемещений: 1(x1,x2,x3,х4,Р)=0
1(x1,x2,x3,х4,Р)=0 11*x1 – принцип пропорциональности, где
11*x1 – принцип пропорциональности, где  ;
; 
 Х1+
Х1+  Х2+
Х2+  Х3+
Х3+  Х4+Мр
Х4+Мр ;
; 
 =М1+ М1+ М2+ М3;
=М1+ М1+ М2+ М3;  =
=