Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные принципы технологии АТМСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
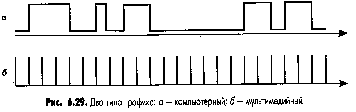
Сеть АТМ имеет классическую структуру крупной территориальной сети - конечные станции соединяются индивидуальными каналами с коммутаторами нижнего уровня, которые в свою очередь соединяются с коммутаторами более высоких уровней. Коммутаторы АТМ пользуются 20-байтными адресами конечных узлов для маршрутизации трафика на основе техники виртуальных каналов. Для частных сетей АТМ определен протокол маршрутизации PNNI (Private NNI), с помощью которого коммутаторы могут строить таблицы маршрутизации автоматически. В публичных сетях АТМ таблицы маршрутизации могут строиться администраторами вручную, как и в сетях Х.25, или могут поддерживаться протоколом PNNI. Коммутация пакетов происходит на основе идентификатора виртуального канала (Virtual Channel Identifier, VCI), который назначается соединению при его установлении и уничтожается при разрыве соединения. Адрес конечного узла АТМ, на основе которого прокладывается виртуальный канал, имеет иерархическую структуру, подобную номеру в телефонной сети, и использует префиксы, соответствующие кодам стран, городов, сетям поставщиков услуг и т. п., что упрощает маршрутизацию запросов установления соединения, как и при использовании агрегированных IP-адресов в соответствии с техникой CIDR. Виртуальные соединения могут быть постоянными (Permanent Virtual Circuit, PVC) и коммутируемыми (Switched Virtual Circuit, SVC). Для ускорения коммутации в больших сетях используется понятие виртуального пути - Virtual Path, который объединяет виртуальные каналы, имеющие в сети АТМ общий маршрут между исходным и конечным узлами или общую часть маршрута между некоторыми двумя коммутаторами сети. Идентификатор виртуального пути (Virtual Path Identifier, VPI) является старшей частью локального адреса и представляет собой общий префикс для некоторого количества различных виртуальных каналов. Таким образом, идея агрегирования адресов в технологии АТМ применена на двух уровнях - на уровне адресов конечных узлов (работает на стадии установления виртуального канала) и на уровне номеров виртуальных каналов (работает при передаче данных по имеющемуся виртуальному каналу). Соединения конечной станции АТМ с коммутатором нижнего уровня определяются стандартом UNI (User Network Interface). Спецификация UNI определяет структуру пакета, адресацию станций, обмен управляющей информацией, уровни протокола АТМ, способы установления виртуального канала и способы управления графиком. В настоящее время принята версия UNI 4.0, но наиболее распространенной версией, поддерживаемой производителями оборудования, является версия UNI 3.1. Стандарт АТМ не вводит свои спецификации на реализацию физического уровня. Здесь он основывается на технологии SDH/SONET, принимая ее иерархию скоростей. В соответствии с этим начальная скорость доступа пользователя сети - это скорость ОС-3 155 Мбит/с. Организация АТМ Forum определила для АТМ не все иерархии скоростей SDH, а только скорости ОС-3 и ОС-12 (622 Мбит/с). На скорости 155 Мбит/с можно использовать не только волоконно-оптический кабель, но и неэкранированную витую пару категории 5. На скорости 622 Мбит/с допустим только волоконно-оптический кабель, причем как SMF, так и MMF. Имеются и другие физические интерфейсы к сетям АТМ, отличные от SDH/ SONET. К ним относятся интерфейсы Т1/Е1 и ТЗ/ЕЗ, распространенные в глобальных сетях, и интерфейсы локальных сетей - интерфейс с кодировкой 4В/5В со скоростью 100 Мбит/с (FDDI) и интерфейс со скоростью 25 Мбит/с, предложенный компанией IBM и утвержденный АТМ Forum. Кроме того, для скорости 155,52 Мбит/с определен так называемый «cell-based» физический уровень, то есть уровень, основанный на ячейках, а не на кадрах SDH/SONET. Этот вариант физического уровня не использует кадры SDH/SONET, а отправляет по каналу связи непосредственно ячейки формата АТМ, что сокращает накладные расходы на служебные данные, но несколько усложняет задачу синхронизации приемника с передатчиком на уровне ячеек. Все перечисленные выше характеристики технологии АТМ не свидетельствуют о том, что это некая «особенная» технология, а скорее представляют ее как типичную технологию глобальных сетей, основанную на технике виртуальных каналов. Особенности же технологии АТМ лежат в области качественного обслуживания разнородного трафика и объясняются стремлением решить задачу совмещения в одних и тех же каналах связи и в одном и том же коммуникационном оборудовании компьютерного и мультимедийного трафика таким образом, чтобы каждый тип трафика получил требуемый уровень обслуживания и не рассматривался как «второстепенный». Трафик вычислительных сетей имеет ярко выраженный асинхронный и пульсирующий характер. Компьютер посылает пакеты в сеть в случайные моменты времени, по мере возникновения в этом необходимости. При этом интенсивность посылки пакетов в сеть и их размер могут изменяться в широких пределах - например, коэффициент пульсаций трафика (отношения максимальной мгновенной интенсивности трафика к его средней интенсивности) протоколов без установления соединений может доходить до 200, а протоколов с установлением соединений - до 20. Чувствительность компьютерного трафика к потерям данных высокая, так как без утраченных данных обойтись нельзя и их необходимо восстановить за счет повторной передачи. Мультимедийный трафик, передающий, например, голос или изображение, характеризуется низким коэффициентом пульсаций, высокой чувствительностью к задержкам передачи данных (отражающихся на качестве воспроизводимого непрерывного сигнала) и низкой чувствительностью к потерям данных (из-за инерционности физических процессов потерю отдельных замеров голоса или кадров изображения можно компенсировать сглаживанием на основе предыдущих и последующих значений). Сложность совмещения компьютерного и мультимедийного трафика с диаметрально противоположными характеристиками хорошо видна на рис. 6.29.
На возможности совмещения этих двух видов трафика большое влияние оказывает размер компьютерных пакетов. Если размер пакета может меняться в широком диапазоне (например, от 29 до 4500 байт, как в технологии FDDI), то даже при придании голосовым пакетам высшего приоритета обслуживания в коммутаторах время ожидания компьютерного пакета может оказаться недопустимо высоким. Например, пакет в 4500 байт будет передаваться в выходной порт на скорости 2 Мбит/с (максимальная скорость работы порта коммутатора frame relay) 18 мс. При совмещении трафика за это время необходимо через этот же порт передать 144 замера голоса. Прерывать передачу пакета в сетях нежелательно, так как при распределенном характере сети накладные расходы на оповещение соседнего коммутатора о прерывании пакета, а потом - о возобновлении передачи пакета с прерванного места оказываются слишком большими. Подход, реализованный в технологии АТМ, состоит в передаче любого вида трафика - компьютерного, телефонного или видео - пакетами фиксированной и очень маленькой длины в 53 байта. Пакеты АТМ называют ячейками - cell. Поле данных ячейки занимает 48 байт, а заголовок - 5 байт. Чтобы пакеты содержали адрес узла назначения и в то же время процент служебной информации не превышал размер поля данных пакета, в технологии АТМ применен стандартный для глобальных вычислительных сетей прием - передача ячеек в соответствии с техникой виртуальных каналов с длиной номера виртуального канала в 24 бит, что вполне достаточно для обслуживания большого количества виртуальных соединений каждым портом коммутатора глобальной (может быть всемирной) сети АТМ. Размер ячейки АТМ является результатом компромисса между телефонистами и компьютерщиками - первые настаивали на размере поля данных в 32 байта, а вторые - в 64 байта. Чем меньше пакет, тем легче имитировать услуги каналов с постоянной битовой скоростью, которая характерна для телефонных сетей. Ясно, что при отказе от жестко синхронизированных временных слотов для каждого канала идеальной синхронности добиться будет невозможно, однако чем меньше размер пакета, тем легче этого достичь. Для пакета, состоящего из 53 байт, при скорости в 155 Мбит/с время передачи кадра на выходной порт составляет менее 3 мкс. Так что, эта задержка не очень существенна для трафика, пакеты которого должны передаваться каждые 125 мкс. Однако на выбор размера ячейки большее влияние оказала не величина ожидания передачи ячейки, а задержка пакетизации. Задержка пакетизации - это время, в течение которого первый замер голоса ждет момента окончательного формирования пакета и отправки его по сети. При размере поля данных в 48 байт одна ячейка АТМ обычно переносит 48 замеров голоса, которые делаются с интервалом в 125 мкс. Поэтому первый замер должен ждать примерно 6мс, прежде чем ячейка будет отправлена по сети. Именно по этой причине телефонисты боролись за уменьшения размера ячейки, так как 6 мс - это задержка, близкая к пределу, за которым начинаются нарушения качества передачи голоса. При выборе размера ячейки в 32 байта задержка пакетизации составила бы 4 мс, что гарантировало бы более качественную передачу голоса. А стремление компьютерных специалистов увеличить поле данных до 64 байт вполне понятно - при этом повышается полезная скорость передачи данных. Избыточность служебных данных при использовании 48-байтного поля данных составляет 10 %, а при использовании 32-байтного поля данных она сразу повышается до 16 %. Выбор для передачи данных любого типа небольшой ячейки фиксированного размера еще не решает задачу совмещения разнородного трафика в одной сети, а только создает предпосылки для ее решения. Для полного решения этой задачи технология АТМ привлекает и развивает идеи заказа пропускной способности и качества обслуживания, реализованные в технологии frame relay. Но если сеть frame relay изначально была предназначена для передачи только пульсирующего компьютерного трафика (в связи с этим для сетей frame relay так трудно дается стандартизация передачи голоса), то разработчики технологии АТМ проанализировали всевозможные образцы трафика, создаваемые различными приложениями, и выделили 4 основных класса трафика, для которых разработали различные механизмы резервирования и поддержания требуемого качества обслуживания. Класс трафика (называемый также классом услуг - service class) качественно характеризует требуемые услуги по передаче данных через сеть АТМ. Если приложение указывает сети, что требуется, например, передача голосового трафика, то из этого становится ясно, что особенно важными для пользователя будут такие показатели качества обслуживания, как задержки и вариации задержек ячеек, существенно влияющие на качество переданной информации - голоса или изображения, а потеря отдельной ячейки с несколькими замерами не так уж важна, так как, например, к, воспроизводящее голос устройство может аппроксимировать недостающие замеры и качество пострадает не слишком. Требования к синхронности передаваемых данных очень важны для многих приложений - не только голоса, но и видеоизображения, и наличие этих требований стало первым критерием для деления трафика на классы. Другим важным параметром трафика, существенно влияющим на способ его передачи через сеть, является величина его пульсаций. Разработчики технологии АТМ решили выделить два различных типа трафика в отношении этого параметра - трафик с постоянной битовой скоростью (Constant Bit Rate, CBR) и трафик с переменной битовой скоростью (Variable Bit Rate, VBR). К разным классам были отнесены графики, порождаемые приложениями, использующими для обмена сообщениями протоколы с установлением соединений и без установления соединений. В первом случае данные передаются самим приложением достаточно надежно, как это обычно делают протоколы с установлением соединения, поэтому от сети АТМ высокой надежности передачи не требуется. А во втором случае приложение работает без установления соединения и восстановлением потерянных и искаженных данных не занимается, что предъявляет повышенные требования к надежности передачи ячеек сетью АТМ. В результате было определено пять классов трафика, отличающихся следующими качественными характеристиками: - наличием или отсутствием пульсации трафика, то есть графики CBR или VBR; - требованием к синхронизации данных между передающей и принимающей сторонами; - типом протокола, передающего свои данные через сеть АТМ, - с установлением соединения или без установления соединения (только для случая передачи компьютерных данных). Основные характеристики классов графика АТМ приведены в табл. 6.4. Таблица 6.4. Классы графика АТМ.
Очевидно, что только качественных характеристик, задаваемых классом трафика, для описания требуемых услуг оказывается недостаточно. В технологии АТМ для каждого класса графика определен набор количественных параметров, которые приложение должно задать. Например, для графика класса А необходимо указать постоянную скорость, с которой приложение будет посылать данные в сеть, а для графика класса В - максимально возможную скорость, среднюю скорость и максимально возможную пульсацию. Для голосового графика можно не только указать на важность синхронизации между передатчиком и приемником, но и количественно задать верхние границы задержки и вариации задержки ячеек. В технологии АТМ поддерживается следующий набор основных количественных параметров: Peak Cell Rate (PCR) - максимальная скорость передачи данных; Sustained Cell Rate (SCR) - средняя скорость передачи данных; Minimum Cell Rate (MCR) - минимальная скорость передачи данных; Maximum Burst Size (MBS) - максимальный размер пульсации; Cell Loss Ratio (CLR) - доля потерянных ячеек; Cell Transfer Delay (CTD) - задержка передачи ячеек; Cell Delay Variation (CDV) - вариация задержки ячеек. Параметры скорости измеряются в ячейках в секунду, максимальный размер пульсации - в ячейках, а временные параметры - в секундах. Максимальный размер пульсации задает количество ячеек, которое приложение может передать с максимальной скоростью PCR, если задана средняя скорость. Доля потерянных ячеек является отношением потерянных ячеек к общему количеству отправленных ячеек по данному виртуальному соединению. Так как виртуальные соединения являются дуплексными, то для каждого направления соединения могут быть заданы разные значения параметров. В технологии АТМ принят не совсем традиционный подход к трактовке термина «качество обслуживания» - QoS. Обычно качество обслуживания трафика характеризуется параметрами пропускной способности (здесь это RCR, SCR, MCR, MBS), параметрами задержек пакетов (CTD и CDV), а также параметрами надежности передачи пакетов (CLR). В АТМ характеристики пропускной способности называют параметрами трафика и не включают их в число параметров качества обслуживания QoS, хотя по существу они таковыми являются. Параметрами QoS в АТМ являются только параметры CTD, CDV и CLR. Сеть старается обеспечить такой уровень услуг, чтобы поддерживались требуемые значения и параметров трафика, и задержек ячеек, и доли потерянных ячеек. Соглашение между приложением и сетью АТМ называется трафик-контрактом. Основным его отличием от соглашений, применяемых в сетях frame relay, является выбор одного из нескольких определенных классов трафика, для которого наряду с параметрами пропускной способности трафика могут указываться параметры задержек ячеек, а также параметр надежности доставки ячеек. В сети frame relay класс трафика один, и он характеризуется только параметрами пропускной способности. Необходимо подчеркнуть, что задание только параметров трафика (вместе с параметрами QoS) часто не полностью характеризует требуемую услугу, поэтому задание класса трафика полезно для уточнения нужного характера обслуживания V, данного соединения сетью. В некоторых случаях специфика приложения такова, что ее трафик не может f быть отнесен к одному из четырех стандартных классов. Поэтому для этого случая введен еще один класс X, который не имеет никаких дополнительных описаний, а полностью определяется теми количественными параметрами трафика и QoS, которые оговариваются в график-контракте. Если для приложения не критично поддержание параметров пропускной способности и QoS, то оно может отказаться от задания этих параметров, указав признак «Best Effort» в запросе на установление соединения. Такой тип трафика получил название трафика с неопределенной битовой скоростью - Unspecified Bit Rate, UBR. После заключения график-контракта, который относится к определенному виртуальному соединению, в сети АТМ работает несколько протоколов и служб, обеспечивающих нужное качество обслуживания. Для трафика UBR сеть выделяет ресурсы «по возможности», то есть те, которые в данный момент свободны от использования виртуальными соединениями, заказавшими определенные параметры качества обслуживания. Технология АТМ изначально разрабатывалась для поддержки как постоянных, так и коммутируемых виртуальных каналов (в отличие от технологии frame relay, долгое время не поддерживающей коммутируемые виртуальные каналы). Автоматическое заключение трафик-контракта при установлении коммутируемого виртуального соединения представляет собой весьма непростую задачу, так как коммутаторам АТМ необходимо определить, смогут ли они в дальнейшем обеспечить передачу трафика данного виртуального канала наряду с графиком других виртуальных каналов таким образом, чтобы выполнялись требования качества обслуживания каждого канала.
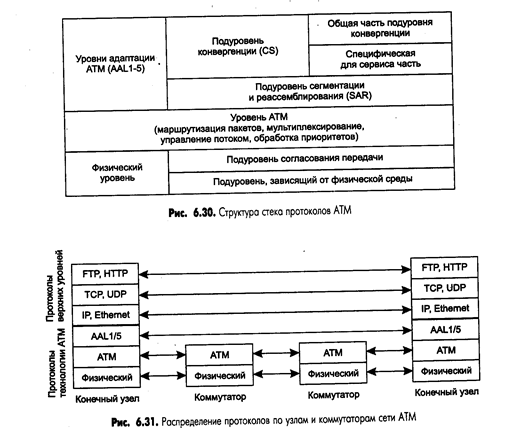
Стек протоколов АТМ. Стек протоколов АТМ показан на рис 6.30, а распределение протоколов по конечным узлам и коммутаторам АТМ - на рис. 6.31.
Верхние уровни сети Рис. 6.31. Распределение протоколов по узлам и коммутатором сети АТМ Стек протоколов АТМ соответствует нижним уровням семиуровневой модели ISO/OSI и включает уровень адаптации АТМ, собственно уровень АТМ и физический уровень. Прямого соответствия между уровнями протоколов технологии нет.
Уровень адаптации AAL. Уровень адаптации (АТМ Adaptation Layer, AAL) представляет собой набор протоколов AAL1-AAL5, которые преобразуют сообщения протоколов верхних уровней сети АТМ в ячейки АТМ нужного формата. Функции этих уровней достаточно условно соответствуют функциям транспортного уровня модели OSI, например функциям протоколов TCP или UDP. Протоколы AAL при передаче пользовательского трафика работают только в конечных узлах сети (см. рис. 6.31), как и транспортные протоколы большинства технологий. Каждый протокол уровня AAL обрабатывает пользовательский график определенного класса. На начальных этапах стандартизации каждому классу трафика соответствовал свой протокол AAL, который принимал в конечном узле пакеты от протокола верхнего уровня и заказывал с помощью соответствующего протокола нужные параметры трафика и качества обслуживания для данного виртуального канала. При развитии стандартов АТМ такое однозначное соответствие между классами трафика и протоколами уровня AAL исчезло, и сегодня разрешается использовать для одного и того же класса трафика различные протоколы уровня AAL. Уровень адаптации состоит из нескольких подуровней. Нижний подуровень AAL называется подуровнем сегментации и реассемблирования (Segmentation And Reassembly, SAR). Эта часть не зависит от типа протокола AAL (и, соответственно, от класса передаваемого трафика) и занимается разбиением (сегментацией) сообщения, принимаемого AAL от протокола верхнего уровня, на ячейки АТМ, снабжением их соответствующим заголовком и передачей уровню АТМ для отправки в сеть. Верхний подуровень AAL называется подуровнем конвергенции - Convergence Sublayer, CS. Этот подуровень зависит от класса передаваемого трафика. Протокол подуровня конвергенции решает такие задачи, как, например, обеспечение временной синхронизации между передающим и принимающим узлами (для трафика, требующего такой синхронизации), контролем и возможным восстановлением битовых ошибок в пользовательской информации, контролем целостности передаваемого пакета компьютерного протокола (Х.25, frame relay). Протоколы AAL для выполнения своей работы используют служебную информацию, размещаемую в заголовках уровня AAL. После приема ячеек, пришедших по виртуальному каналу, подуровень SAR протокола AAL собирает посланное по сети исходное сообщение (которое в общем случае было разбито на несколько ячеек АТМ) с помощью заголовков AAL, которые для коммутаторов АТМ являются прозрачными, так как помещаются в 48-битном поле данных ячейки, как и полагается протоколу более высокого уровня. После сборки исходного сообщения протокол AAL проверяет служебные поля заголовка и концевика кадра AAL и на их основании принимает решение о корректности полученной информации. Ни один из протоколов AAL при передаче пользовательских данных конечных узлов не занимается восстановлением потерянных или искаженных данных. Максимум, что делает протокол AAL, - это уведомляет конечный узел о таком событии. Так сделано для ускорения работы коммутаторов сети АТМ в расчете на то, что случаи потерь или искажения данных будут редкими. Восстановление потерянных данных (или игнорирование этого события) отводится протоколам верхних уровней, не входящим в стек протоколов технологии АТМ. Протокол AAL1 обычно обслуживает трафик класса А с постоянной битовой скоростью (Constant Bit Rate, CBR), который характерен, например, для цифрового видео и цифровой речи и чувствителен к временным задержкам. Этот трафик передается в сетях АТМ таким образом, чтобы эмулировать обычные выделенные цифровые линии. Заголовок AAL1 занимает в поле данных ячейки АТМ 1 или 2 байта, оставляя для передачи пользовательских данных соответственно 47 или 46 байт. В заголовке один байт отводится для нумерации ячеек, чтобы приемная сторона могла судить о том, все ли посланные ячейки дошли до нее или нет. При отправке голосового графика временная отметка каждого замера известна, так как они следуют друг за другом с интервалом в 125 мкс, поэтому при потере ячейки можно скорректировать временную привязку байт следующей ячейки, сдвинув ее на 125*46 мкс. Потеря нескольких байт замеров голоса не так страшна, так как на приемной стороне воспроизводящее оборудование сглаживает сигнал. В задачи протокола AAL1 входит сглаживание неравномерности поступления ячеек данных в узел назначения. Протокол AAL2 был разработан для передачи графика класса В, но при развитии стандартов он был исключен из стека протоколов АТМ, и сегодня трафик класса В передается с помощью протокола AAL1, AAL3/4 или AAL5. Протокол AAL3/4 обрабатывает пульсирующий трафик - обычно характерный для графика локальных сетей - с переменной битовой скоростью (Variable Bit Rate, VBR). Этот трафик обрабатывается так, чтобы не допустить потерь ячеек, но ячейки могут задерживаться коммутатором. Протокол AAL3/4 выполняет сложную процедуру контроля ошибок при передаче ячеек, нумеруя каждую составляющую часть исходного сообщения и снабжая каждую ячейку контрольной суммой. Правда, при искажениях или потерях ячеек уровень не занимается их восстановлением, а просто отбрасывает все сообщение - то есть все оставшиеся ячейки, так как для компьютерного трафика или компрессированного голоса потеря части данных является фатальной ошибкой. Протокол AAL3/4 образовался в результате слияния протоколов AAL3 и AAL4, которые обеспечивали поддержку трафика компьютерных сетей соответственно с установлением соединения и без установления соединения. Однако ввиду большой близости используемых форматов служебных заголовков и логики работы протоколы AAL3 и AAL4 были впоследствии объединены. Протокол AAL5 является упрощенным вариантом протокола AAL4 и работает быстрее, так как вычисляет контрольную сумму не для каждой ячейки сообщения, а для всего исходного сообщения в целом и помещает ее в последнюю ячейку сообщения. Первоначально протокол AAL5 разрабатывался для передачи кадров сетей frame relay, но теперь он чаще всего используется для передачи любого компьютерного трафика. Протокол AAL5 может поддерживать различные параметры качества обслуживания, кроме тех, которые связаны с синхронизацией передающей и принимающей сторон. Поэтому он обычно используется для поддержки всех классов трафика, относящегося к передаче компьютерных данных, то есть классов С и D. Некоторые производители оборудования с помощью протокола AAL5 обслуживают трафик CBR, оставляя задачу синхронизации трафика протоколам верхнего уровня. Протокол AAL5 работает не только в конечных узлах, но и в коммутаторах сети АТМ. Однако там он выполняет служебные функции, не связанные с передачей пользовательских данных. В коммутаторах АТМ протокол AAL5 поддерживает служебные протоколы более высоких уровней, занимающиеся установлением коммутируемых виртуальных соединений. Существует определенный интерфейс между приложением, которому требуется передать трафик через сеть АТМ, и уровнем адаптации AAL. С помощью этого интерфейса приложение (протокол компьютерной сети, модуль оцифровывания голоса) заказывает требуемую услугу, определяя тип трафика, его параметры, а также параметры QpS. Технология АТМ допускает два варианта определения параметров QoS: первый - непосредственное задание их каждым приложением, второй - назначение их по умолчанию в зависимости от типа трафика. Последний способ упрощает задачу разработчика приложения, так как в этом случае выбор максимальных значений задержки доставки ячеек и вариации задержек перекладывается на плечи администратора сети. Самостоятельно обеспечить требуемые параметры трафика и QoS протоколы AAL не могут. Для выполнения соглашений трафик-контракта требуется согласованная работа коммутаторов сети вдоль всего виртуального соединения. Эта работа выполняется протоколом АТМ, обеспечивающим передачу ячеек различных виртуальных соединений с заданным уровнем качества обслуживания.
Протокол АТМ. Протокол АТМ занимает в стеке протоколов АТМ примерно то же место, что протокол IP в стеке TCP/IP или протокол LAP-F в стеке протоколов технологии frame relay. Протокол АТМ занимается передачей ячеек через коммутаторы при установленном и настроенном виртуальном соединении, то есть на основании готовых таблиц коммутации портов. Протокол АТМ выполняет коммутацию по номеру виртуального соединения, который в технологии АТМ разбит на две части - идентификатор виртуального пути (Virtual Path Identifier, VPI) и идентификатор виртуального канала (Virtual Channel Identifier, VCI). Кроме этой основной задачи протокол АТМ выполняет ряд функций по контролю за соблюдением трафик-контракта со стороны пользователя сети, маркировке ячеек-нарушителей, отбрасыванию ячеек-нарушителей при перегрузке сети, а также управлению потоком ячеек для повышения производительности сети (естественно, при соблюдении условий трафик-контракта для всех виртуальных соединений). Протокол АТМ работает с ячейками следующего формата, представленного на рис. 6.32. Поле Управление потоком (Generic Flow Control) используется только при взаимодействии конечного узла и первого коммутатора сети. В настоящее время его точные функции не определены. Поля Идентификатор виртуального пути (VitualPath Identifier, VPI) и Идентификатор виртуального канала (Vitual Channel Identifier, VCI) занимают соответственно 1 и 2 байта. Эти поля задают номер виртуального соединения, разделенный на старшую (VPI) и младшую (VCI) части. Поле Идентификатор типа данных (Payload Type Identifier, PTI) состоит из 3-х бит и задает тип данных, переносимых ячейкой, - пользовательские или управляющие (например, управляющие установлением виртуального соединения). Кроме того, один бит этого поля используется для указания перегрузки в сети - он называется Explicit Congestion Forward Identifier, EFCI - и играет ту же роль, что бит FECN в технологии frame relay, то есть передает информацию о перегрузке по направлению потока данных. Поле Приоритет потери кадра (Cell Loss Priority, CLP) играет в данной технологии ту же роль, что и поле DE в технологии frame relay - в нем коммутаторы АТМ отмечают ячейки, которые нарушают соглашения о параметрах качества обслуживания, чтобы удалить их при перегрузках сети. Таким образом, ячейки с CLP=0 являются для сети высокоприоритетными, а ячейки с CLP=1 — низкоприоритетными. Поле Управление ошибками в заголовке (Header Error Control, НЕС) содержит контрольную сумму, вычисленную для заголовка ячейки. Контрольная сумма вычисляется с помощью техники корректирующих кодов Хэмминга, поэтому она позволяет не только обнаруживать ошибки, но и исправлять все одиночные ошибки, а также некоторые двойные. Поле НЕС обеспечивает не только обнаружение и исправление ошибок в заголовке, но и нахождение границы начала кадра в потоке байтов кадров SDH, которые являются предпочтительным физическим уровнем технологии АТМ, или же в потоке бит физического уровня, основанного на ячейках. Указателей, позволяющих в поле данных кадра STS-n (STM-n) технологии SONET/SDH обнаруживать границы ячеек АТМ (подобных тем указателям, которые используются для определения, например, границ виртуальных контейнеров подканалов Т1/Е1), не существует. Поэтому коммутатор АТМ вычисляет контрольную сумму для последовательности из 5 байт, находящихся в поле данных кадра STM-n, и, если вычисленная контрольная сумма говорит о корректности заголовка ячейки АТМ, первый байт становится границей ячейки. Если же это не так, то происходит сдвиг на один байт и операция продолжается. Таким образом, технология АТМ выделяет асинхронный поток ячеек АТМ в синхронных кадрах SDH или потоке бит физического уровня, основанного на ячейках. Рассмотрим методы коммутации ячеек АТМ на основе пары чисел VPI/VCI. Коммутаторы АТМ могут работать в двух режимах - коммутации виртуального пути и коммутации виртуального канала. В первом режиме коммутатор выполняет продвижение ячейки только на основании значения поля VPI, а значение поля VCI он игнорирует. Обычно так работают магистральные коммутаторы территориальных сетей. Они доставляют ячейки из одной сети пользователя в другую на основании только старшей части номера виртуального каналачто соответствует идее агрегирования адресов. В результате один виртуальный путь соответствует целому набору виртуальных каналов, коммутируемых как единое целое. После доставки ячейки в локальную сеть АТМ ее коммутаторы начинают коммутировать ячейки с учетом как VPI, так и VCI, но при этом им хватает для коммутации только младшей части номера виртуального соединения, так что фактически они работают с VCI, оставляя VPI без изменения. Последний режим называется режимом коммутации виртуального канала. Для создания коммутируемого виртуального канала в технологии АТМ используются протоколы, не показанные на рис. 6.30. Подход здесь аналогичен подходу в сети ISDN - для установления соединения разработан отдельный протокол Q.2931, который весьма условно можно отнести к сетевому уровню. Этот протокол во многом похож на протоколы Q.931 и Q.933 (даже номером), но в него внесены, естественно, изменения, связанные с наличием нескольких классов графика и дополнительных параметров качества обслуживания. Протокол Q.2931 опирается на достаточно сложный протокол канального уровня SSCOP, который обеспечивает надежную передачу пакетов Q.2931 в своих кадрах. В свою очередь, протокол SSCOP работает поверх протокола AAL5, который необходим для разбиения кадров SSCOP на ячейки АТМ и сборки этих ячеек в кадры при доставке кадра SSCOP в коммутатор назначения. ПРИМЕЧАНИЕ Протокол Q.2931 появился в стеке протоколов технологии АТМ после принятия версии интерфейса UNI 3.1, а до этого в версии UNI 3.0 вместо него использовался протокол Q.93B. Из-за несовместимости протоколов Q.2931 и Q.93B версии пользовательского интерфейса UNI 3.0 и UNI 3.1 также несовместимы. Версия UNI 4.0 обратно совместима с UNI 3.1, так как основана на тех же служебных протоколах, что и версия UNI 3.1. Виртуальные соединения, образованные с помощью протокола Q.2931, бывают симплексными (однонаправленными) и дуплексными. Протокол Q.2931 позволяет также устанавливать виртуальные соединения типа «один-к-одному» (point-to-point) и «один-ко-многим» (point-to-multipoint). Первый случай поддерживается во всех технологиях, основанных на виртуальных каналах, а второй характерен для технологии АТМ и является аналогом мультивещания, но с одним ведущим вещающим узлом. При установлении соединения «один-ко-многим» ведущим считается узел, который является инициатором этого соединения. Сначала этот узел устанавливает виртуальное соединение всего с одним узлом, а затем добавляет к соединению с помощью специального вызова по одному новому члену. Ведущий узел становится вершиной дерева соединения, а остальные узлы - листьями этого дерева. Сообщения, которые посылает ведущий узел, принимают все листья соединения, но сообщения, которые посылает какой-либо лист (если соединение дуплексное), принимает только ведущий узел. Пакеты протокола Q.2931, предназначенные для установления коммутируемого виртуального канала, имеют те же названия и назначение, что и пакеты протокола Q.933, рассмотренные выше при изучении технологии frame relay, но структура их полей, естественно, другая. Адресом конечного узла в коммутаторах АТМ является 20-байтный адрес. Этот адрес может иметь различный формат, описываемый стандартом ISO 7498. При работе в публичных сетях используется адрес стандарта E.I 64, при этом 1 байт составляет AFI, 8 байт занимает IDI - основная часть адреса Е.164 (15 цифр телефонного номера), а остальные 11 байт части DSP (Domain Specific Part) распределяются следующим образом. 4 байта занимает поле старшей части DSP - High-Order Domain Specific Part (HO-DSP), имеющее гибкий формат и, в сущности, представляющее собой номер сети АТМ, который может делиться на части для агрегированной маршрутизации по протоколу PNNI, подобной той, которая используется в технике CIDR для сетей IP. 6 байт занимает поле идентификатора конечной системы - End System Identifier (ESI), которое имеет смысл МАС-адреса узла АТМ, причем формат его также соответствует формату МАС-адресов IEEE. 1 байт составляет поле селектора, которое не используется при установлении виртуального канала, а имеет для узла локальное назначение. При работе в частных сетях АТМ обычно применяется формат адреса, соответствующий домену международных организаций, причем в качестве международной организации выступает АТМ Forum. В этом случае поле IDI занимает 2 байта, которые содержат код АТМ Forum, данный ISO, а структура остальной части DSP соответствует описанной выше за исключением того, что поле HO-DSP занимает не 4, а 10 байт. Адрес ESI присваивается конечному узлу на предприятии-изготовителе в соответствии с правилами IEEE, то есть 3 первых байта содержат код предприятия, а остальные три байта - порядковый номер, за уникальность которого отвечает данное предприятие. Конечный узел при подключении к коммутатору АТМ выполняет так называемую процедуру регистрации. При этом конечный узел сообщает коммутатору свой ESI-адрес, а коммутатор сообщает конечному узлу старшую часть адреса, то есть номер сети, в которой ра
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-06-29; просмотров: 453; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.95.170 (0.012 с.) |