Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Классификация судового электрооборудования в зависимости от режимов работыСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Судовое электрооборудование будет работать надежно, если оно не только правильно сконструировано, но и правильно используется. СЭО используется правильно, если оно соответствует условиям работы судового механизма, устройства и т.п. Поясним сказанное на примере условий работы электродвигателей. Например, электродвигатели насосов и вентиляторов работают с постоянной нагрузкой, при неизменном токе. В то же время электродвигатели грузоподъемных механизмов работают в более тяжелых условиях – с частыми пусками, сопровождающимися бросками тока. Ясно, что использовать в грузоподъемных механизмах электродвигатели, предназначенные для насосов или вентиляторов нельзя – они быстро сгорят. Если, наоборот, использовать для насосов или вентиляторов электродвигатели, предназначенные для грузоподъемных механизмов, можно, но нецелесообразно – они окажутся недоиспользованными по мощности, т.к. вместо работы в тяжелых условиях (с бросками токов) они станут работать в легких (с постоянной нагрузкой). Иначе говоря, каждому виду СЭО соответствует «свой», определенный режим работы. Тот или иной режим работы электрооборудования полностью зависит от технологических условий работы механизма. Иначе говоря, механизм «навязывает» электрооборудованию (например, электродвигателю) свои условия работы – как работает механизм, так должен работать и электродвигатель. Приведем основные сведения, связанные с понятием «режим работы электрооборудования», применительно к электродвигателям. Это объясняется тем, что основную часть производимой на судне электроэнергии (до 85…90%) потребляют именно электродвигатели.
Трансформаторы и магнитные усилители Трансформаторы в судовых электроприводах, как правило, не применяются. Однако они нашли самое широкое применение на берегу. Здесь от высоковольтных линий электропередач с напряжениями в сотни киловольт питаются предприятия с электроприводами напряжением 380 и 660 В.
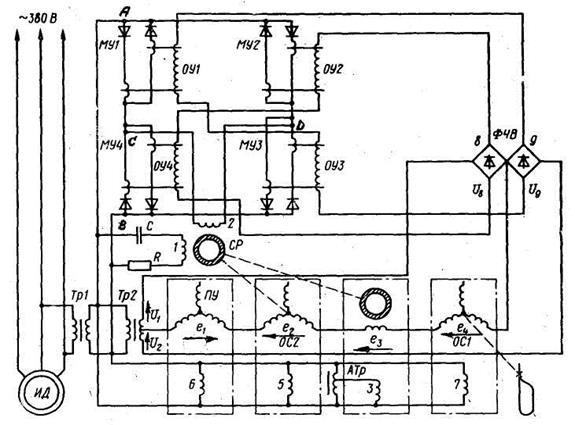
Схема следящего управления РЭП судов типа «А. Пушкин» На сердечнике каждого магнитного усилителя, например, МУ1, находятся две рабочие обмотки РО1 и РО2 и обмотка управления ОУ. Рабочие обмотки при помощи диодов VD1 и VD2 включены по схеме с внутренней положительной обратной связью. Суть этой схемы состоит в том, что рабочие обмотки из-за диодов пропускают ток поочередно, каждая в «свою» половину периода переменного напряжения. Иначе говоря, ток в любой рабочей обмотке – выпрямленный однополупериодный. Как известно из курса электротехники, такой ток имеет две составляющие: 1. переменную с частотой 50 Гц; 2. постоянную. Переменная состаляющая тока позволяет рабочей обмотке сохранить индуктивное сопротивление Xl = 2π*f*L, где f = 50 Гц, L – индуктивность рабочей обмотки. Постоянная же составляющая создает дополнительное (помимо обмотки управления ОУ) подмагничивание сердечника МУ и тем самым увеличивает коэффициент усиления МУ по току. Обмотки управления ОУ1…ОУ4 включены попарно-последовательно на выходные напряжения мостиков 8 и 9: с выхода мостика 8 питаются обмотки ОУ2 и ОУ4, с выхода мостика 9 – обмотки ОУ1 и ОУ3. Схема управления Схема управления включает в себя: 1. Тр1 – силовой трасформатор 380 / 220 В; 2. Тр2 – трансформатор питания обмоток управления ОУ1…ОУ4 магнитных усилителей МУ1…МУ4; 3. сельсин-трансформатор поста управления ПУ; 4. сельсин-трансформатор насоса Холла ОС2 (второй датчик обратной связи); 5. тахогенератор ТГ; 6. сельсин-трансформатор руля ОС1 (первый датчик обратной связи); 7. серводвигатель руля СР; 8. магнитные усилители МУ1….МУ4; 9. выпрямительные мостики 8 и 9 (в учебнике Головина «Судовые электрические приводы» неправильно обозначены как ФЧВ, т.е. фазочувствительный выпрямитель).
Синхронные машины
В гребных электрических установках переменного тока в качестве главных генераторов применяются синхронные машины, а в качестве гребных электродвигателей — синхронные или асинхронные. Электротехническое устройство, предназначенное для автоматического включения синхронного генератора на параллельную работу (на шины), называется синхронизатором. Синхронизаторы обеспечивают практически безударное включение СГ на шины методом точной синхронизации. Существующие АС допускают включение СГ при неточном выполнении условий синхронизации, что позволяет ускорить процесс синхронизации и одновременно упростить схему самого АС. Синхронизация считается возможной, если отклонения от условий синхронизации имеют такие значения: 1. разность напряжений генератора и сети ΔU < (0,10…0,12) Uном (при напряжении на шинах 400 В напряжение подключаемого генератора может составлять 360…352 В); 2. разность частот Δf < (0,005…0,015) fном (при частоте 50 Гц на шинах частота тока подключаемого генератора может составлять 49,75…49,25 Гц); 3. угол сдвига фаз одноименных векторов фазных напряжений генератора и сети φ < 10°. В СЭЭС напряжение генераторов поддерживается постоянным при помощи АРН. Поэтому на долю аппаратуры, осуществляющей синхронизацию, остаются процессы подгонки частоты и определение момента выдачи сигнала на включение АВ генератора. Этот сигнал надо подавать с некоторым опережением по времени (tоп) относительно момента совпадения фаз, потому что АВ генератора имеет собственное время срабатывания (tавт). По принципу действия различают два вида АС: 1. с постоянным временем опережения; 2. с постоянным углом опережения. На практике нашли применение АС первого типа, которые, вне зависимости от разности частот обоих генераторов, выдают сигнал на включение АВ генератора всегда с одним и тем же временем опережения tоп, равным времени срабатывания tавт автоматического выключателя подключаемого генератора. При соблюдении этого условия (tоп = tавт) включение генератора на шины получается безударным («мягким»). В качестве примера рассмотрим автоматический синхронизатор типа БСГ.
|
||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 536; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.155.48 (0.006 с.) |