
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сигнализатор движения радиоволновый СДР101ПСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Сигнализатор движения радиоволновый СДР101П предназначен для непрерывного контроля (сигнализации) линейного перемещения твердых (сыпучих) сред на лентах транспортеров, перемещения ковшей норий и других подобных механизмов, обнаружения движения потока продукта в самотечном, аэрозольном и пневматическом транспорте, а также сигнализации попадания продукта в воздухопроводы, наличия продукта на конвеерной ленте (рис.6.40-6.42). Сигнализатор может быть использован для своевременного отключения механизмов при их холостой (без продукта) работе в целях экономии электроэнергии. Размещенный в приборе передатчик излучает радиоволну с фиксированной частотой в направлении поверхности контролируемого объекта. Частота отраженного от этой поверхности сигнала отличается от излученной, если поверхность движется в пространстве. В результате сложения и детектирования отраженного и излученного сигналов в приемнике выделяется сигнал разностной частоты, пропорциональный линейной скорости движения. Достоинства: отсутствие контакта с контролируемым продуктом; простота и надежность прибора; современная элементная база; малые габаритные размеры и масса. Основные функции: восприятие радиальной, по отношению к направлению излучения, составляющей скорости движения продукта, механизмов или их агрегатов; выдача релейного сигнала, соответствующего наличию или отсутствию движения, с задержкой времени включения (выключения); световая индикация, отображающая режим работы (табл. 6.8).
Таблица 6.8. Технические характеристики СДР101П
ООО «Контакт-1», г. Рязань.
Рис. 6.40. Варианты размещения прибора для сигнализации наличия или отсутствия продукта на ленте транспортера или конвейера
Рис. 6.41. Вариант размещения прибора для сигнализации наличия или отсутствия продукта в продуктотрубопроводе
Рис. 6.42. Вариант размещения прибора для сигнализации движения вращающихся частей и механизмов
6.6. Волоконно-оптические датчики
6.6.1. Волоконно-оптические датчики магнитного поля
Датчики магнитного поля представляют собой важный класс аппаратуры. Для измерения низкочастотных (<10 Гц) магнитных полей с уровнем ниже 10-9 Тл (10-5 Гс) разработано пять различных технологий. На их основе могут быть построены: феррозондовые приборы, прецессионные приборы, сверхпроводящие квантовые интерферометры, оптоволоконные устройства и устройства на основе эффекта магнитоупругости, приводимые в действие механическим напряжением [24]. Устройства, применимые для измерения высокочастотных (>10 Гц) магнитных полей, это: проволочная петля (измерительная катушка), волоконно-оптические устройства на основе эффекта Фарадея и объемные устройства на основе эффекта Фарадея. Свету, распространяющемуся через любую среду, присуще свойство поляризации. Состояние поляризации в любой точке характеризуется функцией зависимости вектора электрического поля Е световой волны в этой точке от времени. В наиболее общем случае конец вектора поля Е с течением времени описывает в пространстве эллипс. Такая поляризация называется эллиптической. Состояние поляризации любой распространяющейся волны может быть представлено как суперпозиция двух волн, имеющих ортоганальные состояния поляризации, например, две ортоганальные линейно поляризованные волны или две волны с круговой поляризацией, имеющие противоположные направления вращения. Если состояние поляризации некоторым образом изменяется при распространении излучения через вещество, такое вещество называют двулучепреломляющим и свойства двулучепреломления можно характеризовать по типу волн, на состояние поляризации которых среда не влияет. Таким образом, состояние поляризации излучения с круговой поляризацией остается постоянным в веществах, имеющих круговое двулучепреломление. Однако те же самые материалы сильно влияют на состояние поляризации линейно поляризованного излучения (рис. 6.43), где плоскость поляризации линейно поляризованного излучения поворачивается на угол q после прохождения через круговую двулучепреломляющую среду [24].
Рис. 6.43. Вращение плоскости поляризации линейно поляризованного света круговой двулучепреломляющей средой Статическое круговое двулучепреломление прямого участка круглой сердцевины оптического волокна обычно достаточно мало. Однако в присутствии магнитного поля (Н) возникшее в волокне круговое двулучепреломление повернет плоскость поляризации линейно поляризованного излучения на угол q:
где магнитооптическая постоянная Верде V является мерой интенсивности проявления эффекта Фарадея в волокне и интегрирование выполняется по длине волокна, подвергнутого воздействию поля (Н). Примечательным свойством вращения под воздействием эффекта Фарадея является его зависимость от направления распространения. Если свет, распространяющийся в одном направлении, подвергается вращению на угол q, свет, двигающийся в противоположном направлении, подвергается вращению на угол -q. Эту зависимость можно использовать в разъединителях мощности, как на оптических, так и на микроволновых частотах. С другой стороны, она может являться помехой в таких устройствах, как волоконно-оптические датчики вращения, основанные на исключении всех источников такой зависимости, кроме эффекта Саньяка. Паразитное магнитное поле может действенно влиять на датчик через эффект Фарадея и искажать выходной сигнал [24]. В типичной схеме измерения тока N витков волокна намотано на проводник с током i. В соответствии с законом Ампера линейный интеграл магнитного поля сводится к
Изменение состояния поляризации q можно измерить с помощью поляриметра (рис. 6.44-6.45). На входе в волокно поляризатор создает линейно поляризованное излучение, в то время как анализатор устанавливается под фиксированным углом по отношению к входному поляризатору. Чтобы поддерживать строго определенное состояние поляризации на всем протяжении, используется одномодовое волокно.
Рис. 6.44. Волоконный поляриметр, сконфигурированный как датчик тока
При наматывании волокна на проводник получается компактный датчик, преимуществом геометрии которого является симметричность по отношению к полю, создаваемому током.
Рис. 6.45. Оптическая схема ВОДТ
6.6.2. Измерение давления
Разработано несколько волоконно-оптических датчиков на основе интенсивности, предназначенных для измерения давления в промышленных условиях. Такие датчики могут применяться для наблюдения за давлением в котлах, химических реакторах, двигателях и в теле человека [24]. Для измерения переменных флуктуаций давления применяются как датчики с внешним чувствительным элементом, так и «чистоволоконные» датчики, как датчики интенсивности, так и датчики интерферометрического типа. Для измерения статического давления может быть измерена величина интенсивности излучения, отражаемого от тонкой мембраны, которая прогибается под воздействием прилагаемого давления. Такой датчик включает в себя волоконно-оптический отражательный чувствительный элемент. Если применяется раздвоенный жгут (рис. 6.46), то половину волокон можно использовать для передачи излучения к волокну, а вторую половину волокон использовать для передачи излучения к фотодетектору.
Рис. 6.46. Датчик давления фирмы OPTECH
Свет выходящих из входных волокон образует массив пятен, диаметр которых увеличивается при увеличении расстояния от конца жгута пропорционально числовой апертуре волокна. Количество излучения, которое попадает в выходные волокна после отражения от мембраны, зависит от приложенного давления, поскольку в зависимости от давления изменяется расстояние от мебраны до конца жгута [24]. Металлические мембраны, используемые в обычных датчиках давления, привысоких температурах начинают деформироваться, и измерители деформации или емкостные тензодатчики перестают функционировать. Кроме того, гидросмесь, используемая при технологическом процессе сжижения угля, обладает чрезвычайной едкостью. Чтобы избежать проблем, связанных с деформацией и разъеданием, в качестве материала мембраны используется высокопрочный сплав инконель; а для измерения прогиба мембраны под воздействием приложенного давления используется волоконно-оптический датчик на основе микроизгибов (рис. 6.47) [24].
Рис. 6.47. Датчик давления
Волоконно-оптический датчик на основе микроизгибов представляет собой покрытое защитной металлической оболочкой многомодовое оптическое волокно со ступенчато изменяющимся показателем преломления, сдавливаемое двумя гофрированными поверхностями (рис. 6.48). Гофрированная поверхность мембраны смещается под воздействием вызванного давлением прогиба мембраны. Прогиб служит причиной изменения амплитуды периодических искривлений волокна между складками поверхности. Оптическая мощность в сердцевине волокна затухает пропорционально амплитуде искривлений из-за превращения распространяющихся мод в излучаемые [24]. Обусловленные излучением мод потери мощности в сердцевине волокна оптимальны, когда частота пространственных изгибов волокна равна разности между константами распространения (Δβ) распространяющихся и излучаемых мод:
где Λ – промежутки между складками гофрированной поверхности (рис. 6.48).
Рис. 6.48. Принцип основанный на непрерывных микроизгибах датчика, в котором используется деформирующий волокно спирально закрученный внутренний элемент оболочки 6.6.3. Измерение температуры
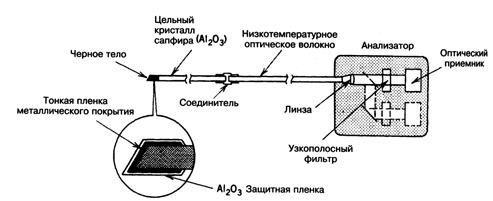
Для измерения температуры в промышленных условиях разработано множество методов на основе оптических волокон, и некоторые датчики выпускаются серийно [24]. Например, датчик компании Aссufiber включает в себя тонкий сапфировый стержень (рис. 6.49).
Рис. 6.49. Схема датчика на основе сапфирового черного тела и оптический анализатор
Измерительный конец стержня покрыт тугоплавким металлом. Другой конец стержня подсоединен к низкотемпературному оптическому волокну за пределами высокотемпературной зоны измерений. Лучистая энергия от раскаленного металлического покрытия проводится по сапфировому стержню и низкотемпературному оптическому волокну к блоку анализа и отображения. Покрытый металлом кончик волокна представляет собой черное тело, спектр излучения которого зависит от температуры в соответствии с законом излучения Планка. Анализ узкой полосы спектра излучения, выходящего из низкотемпературного волокна, выполняется при помощи оптического интерференционного фильтра и фотодетектора, преобразуещего энергию излучения в электрическую энергию [24]. Дистанционные измерения температуры при температурах ниже 400°С могут быть выполнены при помощи спектрально-селективных методов. Такие методы не чувствительны к изменениям излучения черного тела, но скорее регистрируют на вызванные температурой изменения флуоресценции или спектров поглощения определенных специальных веществ. В выпускаемой в настоящее время системе Luxtron светящийся люминофор размещен на кончике оптического волокна в зоне измерения (рис. 6.50).
Рис. 6.50. Схема кончика волокна с люминофорным покрытием Импульсы оптического возбуждения вызывают свечение люминофора, и время, за которое угасает свечение, зависит от температуры. В настоящее время некоторые компании производящие радиационные пирометр, начали применять в этих приборах головку, формирующую изображение, и волоконный жгут. Такое сочетание позволяет дистанционно выполнять бесконтактные измерения температуры путем передачи по волокну излучения из горячей зоны к пирометру [24].
6.6.4. Измерение уровня
Имеется множество способов измерения уровня жидкости при помощи волоконно-оптических датчиков. При одном из подходов волокна используются для передачи света в призму. При соответствующим образом подобранном угле призмы происходит полное внутреннее отражение света, когда призма находится в воздухе. Если призма погружается в жидкость, в жидкости происходит преломление света. Таким образом, это устройство действует как выключатель света, зависящий от уровня жидкости [24]. Треугольная призма, используемая в датчике уровня воды, устроена так, что, когда она погружена в воду, пучки красного и зеленого цвета, проходя через порты, отклоняются по отношению к отверстиям в кодирующей пластине в соответствии с законом преломления Снеллиуса. Для формирования пучков света используются лампа, красный и зеленый световой фильтры и колимирующие линзы (рис. 6.51-6.52).
Рис. 6.51. Принцип действия датчика уровня воды: а) отклонение пучков света при прохождении через воду; б) отсутствие отклонения пучков
света при прохождении через пар.
При наличии воды зеленый свет проходит через порт датчика и отверстие. При отсутствии воды лучи проходят через воздух или пар и не отклоняются. В результате через отверстие проходит пучок красного света [24]. Свет от каждого из отверстий собирается и вводится в отдельные оптические волокна, которые подсоединены к устройству отображения в диспетчерской (рис. 6.52).
Рис. 6.52. Вид сбоку волоконно-оптического считывающего устройства датчика уровня воды, состоящего из пяти портов. Основным преимуществом такого волоконно-оптического средства считывания уровня воды с датчика-водомера является его надежность, обеспеченная пассивностью процесса измерения [24].
6.6.5. Измерение скорости потока
Достаточно хорошо изучен метод лазерного доплеровского измерения скорости. Принцип действия волоконно-оптических датчиков основанных на данном методе, заключается в следующем. Излучение подводится к зонду по оптическим волокнам, и он фокусирует два световых пучка внутри текущего вещества. Картина интерференционных полос в области перекрытия световых пучков определяет объем выборки (рис. 6.53). Также по волокнам в электронный блок обработки возвращается излучение, рассеянное частицами, которые проходят через картину интерференции, созданную формирующими объем измерения пучками [24]. Скорость частиц определяется на основании частотного спектра модуляции по графику зависимости интенсивности излучения от времени (рис. 6.53).
Рис. 6.53. Зонд лазерного доплеровского измерителя скорости
Поскольку скорость потока связана с изменениями интенсивности во времени, а не с количеством рассеянного излучения, выходной сигнал такого датчика нечувствителен к загрязнению оптической поверхности [24].
ГЛАВА 2. Система автоматического регулирования технологических параметров (САР)
Автоматическое регулирование параметра – это операция автоматического изменения регулируемой величины по какому-либо закону. Различают: 1) САР стабилизации – это поддержание регулируемого параметра на нужном фиксированном значении (в нефтехимии используется чаще всего); 2) САР программного управления – значение регулируемого параметра может изменяться по программе; 3) САР следящего регулирования - значение регулируемого параметра может изменяться в зависимости от других параметров.
§1. Структура САК и САР
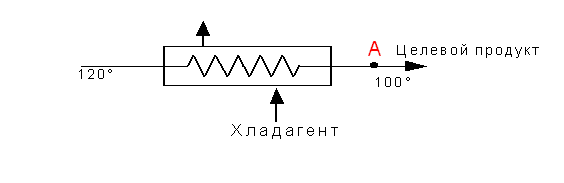
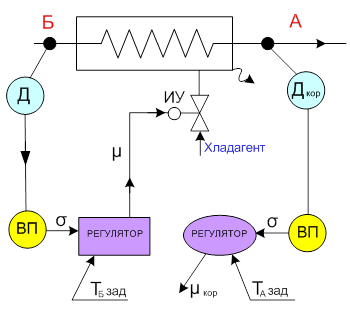
Структура САК: объект контроля, обобщенный датчик Доб, канал связи, вторичный прибор (контроллер, ПК). Структура САР: объект регулирования, обобщенный датчик Доб, канал связи, вторичный прибор (ВП, ПК), регулирующее устройство (регулятор, контроллер), исполнительное устройство (исполнительный механизм + регулирующий орган). Здесь обобщенный датчик обозначается – Доб, персональный компьютер – ПК, вторичный прибор (ВП). В роли регулирующего устройства применяются программируемые контроллеры (или регуляторы). Рассмотрим процесс стабилизации температуры выходящего из теплообменника целевого продукта в точке А. Горячий целевой продукт (120ºС) поступает из соседнего цеха и охлаждается хладагентом до 100ºС (в точке А).
В данной схеме регулирования - температура целевого продукта на входе в теплообменник всегда 120ºС, расход целевого продукта, температура хладагента на входе в теплообменник и расход хладагента на входе в теплообменник не меняются. Температура целевого продукта на выходе из теплообменника в точке А будет 100°С, до тех пор пока не изменится температура целевого продукта на входе в теплообменник (120ºС). Как только величина температуры на входе в теплообменник изменится, данная схема регулирования перестает работать. В этом случае надо будет изменить расход хладагента на входе в теплообменник, но на трубе подачи хладагента нет клапана. Таким образом, данная схема регулирования должна быть усовершенствована. В результате получим схему регулирования (рис. 1.1).
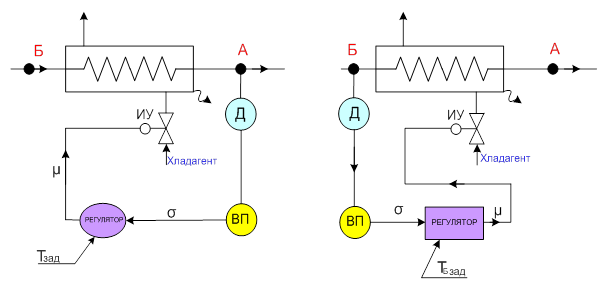
Рис.1.1. САР температуры целевого продукта.
Итак, необходимо стабилизировать температуру в точке А объекта регулирования на уровне 100ºС – это заданное значение регулируемого параметра. Та температура, которая будет в точке А, называется текущим значением регулируемого параметра. Текущее значение регулируемого параметра воспринимается обобщенным датчиком и преобразуется им в унифицированный выходной сигнал. Этот унифицированный сигнал поступает на вторичный прибор и регулирующее устройство – контроллер. Вторичный прибор показывает текущее значение целевого продукта в точке А. Например, текущее значение регулируемого параметра 90°С поступает на контроллер, а в нем заложена величина заданного значения температуры в точке А 100°С. Контроллер в соответствии с программой подсчитывает сигнал рассогласования σ = Ттек – Тзад, то есть σ = 90 ºС – 100 ºС = –10 ºС. Сигнал рассогласования σ считается входным сигналом регулирующего устройства. Регулятор анализирует величину и знак σ и по программе в соответствии со своим законом регулирования вырабатывает регулирующее воздействие μ. Выходным сигналом является μ, которое определяет закон перемещения затвора регулирующего органа. В данном случае Итак, на объект регулирования действуют 2 воздействия: возмущающее и регулирующее. Задачей САР является компенсировать влияние возмущающего воздействия на объект регулирующим воздействием. В результате этой компенсации происходит переходный процесс регулирования. Изменение во времени регулируемой величины в переходном процессе происходит за время регулирования τр.
Виды переходных процессов
Существует несколько видов переходных процессов. После возмущения, нанесенного на объект регулирования, возвращение регулируемого параметра к номиналу в устойчивой САР происходит не сразу, а за время τр, называемое временем регулирования. Переходный процесс изображается графически. Если обозначить ∆у как отклонение величины регулируемого параметра от заданного значения, то возникают 4 возможных вида переходного процесса (а, б – для устойчивых САР; в, г – для неустойчивых САР). а) б)
в) г)
а) Апериодический сходящийся переходный процесс. б) Затухающий колебательный переходный процесс. в) Незатухающий колебательный процесс. г) Расходящийся колебательный процесс.
Переходные процессы в САР возникают не только при появлении возмущающего воздействия, но и при перенастройке системы на новое задание.
Требования к САР 1. САР должна быть устойчивой и должно быть малое τр; 2. В устойчивых САР при одинаковых τр качество регулирования будет лучше у той САР, где меньше ∆уmax и меньшее количество колебаний. 3. После завершения переходного процесса регулируемая величина не возвращается точно к заданному значению, а имеет место статическая погрешность регулирования δ. Чем она меньше, тем качественнее САР.
Некоторые определения
Системы, в которых для приведения в действие регулирующего органа, используется энергия, непосредственно развиваемая измерительным устройством, называются системами регулирования прямого действия. Если для приведения в действие регулирующего органа используется энергия постороннего источника, то такие САР называются системами регулирования косвенного действия. В основном, в производстве наиболее часто встречаются САР косвенного действия. Соответственно регуляторы косвенного действия различаются по виду используемой внешней энергии на электрические, пневматические и гидравлические. Число элементов в САР косвенного действия равно числу элементов в САР прямого действия плюс преобразователи, усилители, сервоприводы.
САР непрерывного и прерывного действия
В САР непрерывного действия при непрерывном изменении регулируемого параметра регулирующий орган перемещается непрерывно. В САР прерывного действия при непрерывном изменении регулируемого параметра регулирующий орган перемещается прерывно. Соответственно САР прерывного действия делятся на: САР импульсные, САР релейные (позиционные). В импульсных САР при непрерывном изменении регулируемого параметра регулирующий орган воздействует на объект отдельными импульсами. Период чередования импульса задается принудительно. В релейных САР регулирующий орган воздействует только тогда, когда непрерывно изменяющаяся регулируемая величина достигает определенного значения или определенных значений. Частный случай релейных САР – двухпозиционная САР. Например, изменение температуры в сауне по времени τ в диапазоне двух уставок 90-1100С (рис.1.2). В качестве регулирующего органа в сауне используется контактная пара для включения и выключения ТЭНа. Регулирующий орган имеет всего 2 положения - контактная пара включена и выключена.
Рис.1.2. Изменение температуры в сауне по времени τ. На практике чаще всего встречаются объекты с несколькими регулируемыми параметрами. Например, в аппарате надо поддерживать постоянное давление и при этом определенный температурный режим. Когда САР различных параметров связаны между собой через объект, то такие САР называются системами связанного регулирования.
Статическая и астатическая САР
САР, в которых в установившихся состояниях существует однозначная зависимость между уровнем регулируемого параметра и нагрузкой, называются статическими. Основным свойством статических САР является поддержание конкретного уровня параметра в соответствии с нагрузкой. Пусть регулируемой величиной является давление (Р) водопроводной воды в трубопроводе жилого дома. Давление в такой системе пусть поддерживается статической САР (рис.1.3), т.е. определенной нагрузке соответствует одно и только одно определенное значение давления. Нагрузка – потребление воды домохозяйками. В случае реализации статической САР в садоводстве дополнительных расходов нет.
Рис.1.3. Статическая САР.
САР, в которых зависимость между уровнем параметра и нагрузкой многозначна (неоднозначна), называются астатическими. Пусть регулируемой величиной является давление (Р) водопроводной воды в трубопроводе жилого дома. Если давление в такой системе поддерживается астатической САР (рис.1.4), то давление водопроводной воды в трубе будет поддерживаться на одном и том же уровне независимо от числа домохозяек, потребляющих в данный момент воду, т.е. независимо от нагрузки. Разумеется, реализация астатической САР обойдется дороже, чем статической САР. Например, для поддержания постоянного уровня поливной воды в общей садоводческой бочке независимо от нагрузки необходимо своевременно подкачивать в бочку воду из Волги. Для этого нужен насос, шланг. А это уже дополнительные расходы.
Рис.1.4. Астатическая САР. Принципы регулирования
Известны следующие принципы регулирования:
По отклонению (принцип Ползунова-Уатта); По возмущению (Понселе); Комбинированный (по отклонению и возмущению); По производной (принцип братьев Сименс).
Рассмотрим первых три принципа регулирования.
По отклонению По возмущению
Комбинированный
Цель этих трех принципов одна и та же – стабилизировать температуру целевого продукта в точке А на уровне, например 100ºС.
Итак, рассмотрим по порядку.
САР по отклонению. Она замкнутая, потому что регулируемый параметр - температура целевого продукта в точке А и регулятор связаны каналом связи. Это САР с так называемой отрицательной обратной связью, т.к. выходной сигнал регулятора компенсирует влияние возмущающего воздействия, т.е. со знаком «–» по сравнению с возмущающим воздействием. Достоинства. Принцип широко распространен, т.к. САР по отклонению имеет ценное свойство – регулятор воздействует на объект таким образом, чтобы устранить погрешность регулирования независимо от того, какими возмущающими действиями она вызвана. Это свойство САР особенно ценно в промышленных условиях, где число возмущающих воздействий может быть велико. В нашем случае, помимо главного возмущающего воздействия, т.е. изменения ТБ, могут быть побочные воздействия. Например, нарушение герметичносоти оболочки теплообменника из-за ржавчины, т.е. потери хладагента, также из-за наличия осадка солей на стенках теплообменника – ухудшение теплообмена. Недостаток. САР инерционна.
САР по возмущению. Здесь расход хладагента автоматически меняется в зависимости от температуры целевого продукта на его входе, т.е. в зависимости от величины главного возмущающего воздействия. Достоинства. Успеваем среагировать на главное возмущающее воздействие и скомпенсировать его влияние на температуру ТА еще до того, как температура в точке А изменилась бы. Недостаток. Эта САР разомкнута, а именно, отсутствует связь регулятора с результатом его работы, т.е. с точкой А нет канала связи (т.е. САР беззащитна перед побочными возмущающими воздействиями).
Комбинированная САР. В комбинированных САР используются достоинства предыдущих двух схем. Для компенсации главного возмущающего воздействия (изменение ТБ) используется САР по возмущению. Для компенсации остальных возмущающих воздействий берется от САР по отклонению корректирующий контур, выходной сигнал которого поступает в виде корректирующего задания основному регулятору, т.е. корректируется задание ТБ.
§2. САР как совокупность типовых динамических звеньев
САР есть совокупность элементов определенным образом соединенных между собой. Каждый элемент выполняет определенные функции. Свойство системы САР в целом зависит от свойств элементов, входящих в систему. Каждый элемент САР полностью описывается статической и динамической характеристикой, так же как и сама система регулирования.
Статическая характеристика элемента САР (рис. 2.1) – это зависимость выходной величины Хвых от входной Хвх в равновесном, т.е. в установившемся, состоянии Хвых = f (Хвх). Эта зависимость может быть представлена формулой, таблицей или графиком в координатах
Рис.2.1. Статическая характеристика элемента САР.
Динамическая характеристика элемента САР (рис.2.2.), – зависимость выходной величины от входной в неустановившемся режиме. Она может быть представлена формулой, таблицей или графиком в координатах.
Рис.2.2. Динамическая характеристика элемента САР.
Входная величина может изменяться скачком (так будем считать в дальнейшем), тогда получившаяся динамическая характеристика называется переходной характеристикой или кривой разгона. Входная величина может изменяться и по-другому: периодически, например по синусоиде. Тогда соответствующая характеристика называется частотной или амплитудно-фазавой. По виду динамической характеристики элементы САР подразделяются на так называемые типовые динамические звенья: 1.усилительное звено (безинерционные, пропорциональные, нулевого порядка); 2.апериодическое звено I порядка (инерционные); 3.интегрирующее звено (астатическое); 4.колебательное звено; 5.апериодическое звено II порядка; 6.дифференцирующее звено. Динамические звенья САР
1. Усилительное звено
Рис. 2.3.
Динамическая характеристика звена
После нанесения скачком возмущения хвх(t) выходная величина хвых(t) изменяется также скачком (рис. 2.4).
Рис. 2.4.
Примеры: электронная лампа, редуктор, рычажное устройство.
Рис. 2.5.
Это звено, в котором может накапливаться или рассеиваться какой-либо вид материи или энергии поданной на вход звена. В результате сигнал, поданный на вход звена, вызывает изменение выходной величины с некоторым замедлением. Это звено эквивалентно звену с самовыравниванием.
Решением уравнения является: где к – коэффициент усиления звена; Т0 – постоянная времени. Эти постоянные коэффициенты зависят от конструкции и принципа действия звена.
Рис. 2.6. Время разгона (3¸4) Т0 – это время, за которое хвых достигнет 99% максимального значения. Представителем данного типа звена является например, термопара. Ее уравнение имеет вид
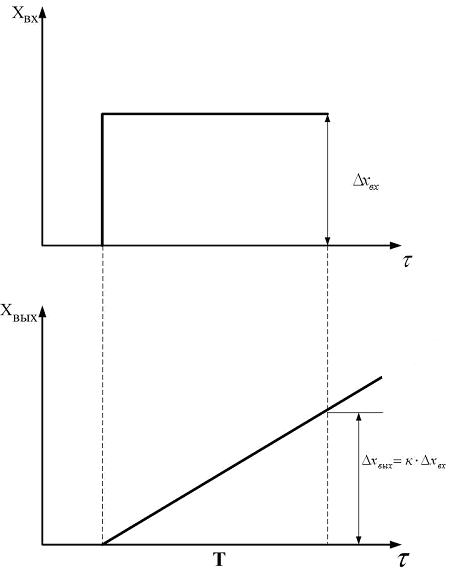
3. Интегрирующее звено (астатическое)
Рис. 2.7. Т – время разгона объекта. В отличие от апериодического звена величина хвых с течением времени у интегрирующего звена не принимает нового установившегося значения (если нет физических ограничений). Пример 1.
Рис. 2.8.
При скачке хвх уровень Н растет, пока не будет переполнения. Это может быть в том случае, если выходное отверстие засорилось, либо на трубопроводе после емкости установлен насос постоянной производительности. Возрастающее гидростатическое давление жидкости не влияет на производительность насоса.
Пример 2.
Рис. 2.9.
Непроточная емкость (физическое ограничение – механическая прочность баллона).
После скачкообразного изменения хвх изменение хвых имеет форму затухающих синусоидальных колебаний (s – коэффициент затухания,
Рис. 2.10.
Звено описывается обыкновенным дифференциальным уравнением 2-го порядка:
где Т1, Т2, к – постоянные коэффициенты. Решение уравнения имеет вид:
где
В зависимости от значения s величина хвых может совершать незатухающие колебания (s=0), возрастающие колебания (s<0), затухающие колебания (s<1). Примером звена (s<1) является U-образная трубка.
Рис. 2.11.
Зависимость
|
||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-20; просмотров: 573; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.180.234 (0.019 с.) |






 .
.










 вместо 100ºС, следовательно, затвор регулирующего органа в соответствии с величиной и знаком σ переместится и уменьшит подачу хладагента. Если же из соседнего цеха в точку Б придет целевой продукт с температурой 150ºС, то, если не принять мер, в точке А вместо 100ºС будет, например, 130ºС. Данная система регулирования будет поддерживать температуру в точке А на отметке 100ºС. Произойдет это за счет увеличения подачи хладагента. Затвор исполнительного устройства в соответствии с величиной и знаком σ переместится и увеличит подачу хладагента. Температура целевого продукта в точке Б – это главное возмущающее воздействие. Регулятор в ответ вырабатывает регулирующее воздействие μ.
вместо 100ºС, следовательно, затвор регулирующего органа в соответствии с величиной и знаком σ переместится и уменьшит подачу хладагента. Если же из соседнего цеха в точку Б придет целевой продукт с температурой 150ºС, то, если не принять мер, в точке А вместо 100ºС будет, например, 130ºС. Данная система регулирования будет поддерживать температуру в точке А на отметке 100ºС. Произойдет это за счет увеличения подачи хладагента. Затвор исполнительного устройства в соответствии с величиной и знаком σ переместится и увеличит подачу хладагента. Температура целевого продукта в точке Б – это главное возмущающее воздействие. Регулятор в ответ вырабатывает регулирующее воздействие μ.
 τ
τ





 ,
, 



 ,
, .
.
 , здесь Е – ТЭДС, qср – температура измеряемой среды.
, здесь Е – ТЭДС, qср – температура измеряемой среды. ,
, .
.


 ).
).
 ,
, ,
, ;
; ;
; ;
; .
.
 в неустановивше
в неустановивше 


