
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Гидроприводы поступательного движенияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
В таких гидроприводах в качестве гидродвигателя применяется гидроцилиндр. Выходное звено гидроцилиндра, которым может быть как шток, так и корпус, непосредственно соединяется с рабочим органом машины, совершающим возвратно-поступательные перемещения. Это позволяет исключить какие-либо редукторы и преобразователи движений.
Рис. 3.5. Конструктивные схемы исполнения гидроцилиндров В зависимости от конструктивной схемы исполнения различают следующие виды гидроцилиндров. Поршневые гидроцилиндры (рис. 3.5, а, б) имеют рабочую камеру, образованную корпусом и поршнем со штоком. Поршень разделяет рабочую камеру на две полости (поршневую и штоковую). Перемещение штока с поршнем происходит под действием рабочей жидкости, поступающей в соответствующую полость гидроцилиндра. Если на объекте управления будет закреплен неподвижно шток, то перемещение совершает корпус. Поршневой гидроцилиндр может быть выполнен с односторонним (рис. 3.5, а) или двухсторонним (рис. 3.5, б) штоком. При одном и том же подводимом расходе рабочей жидкости скорость перемещения выходного звена у гидроцилиндра с двухсторонним штоком будет одинаковой в двух направлениях. Если технологический цикл машины требует перемещения рабочего органа с различной скоростью в каждом направлении, применяется гидроцилиндр с односторонним штоком, который более прост в изготовлении и имеет меньшие габариты в машине. Плунжерный гидроцилиндр (рис. 3.5, в) имеет одну полость, образованную корпусом и плунжером. Рабочая жидкость перемещает плунжер только в одном направлении. Такие гидроцилиндры очень просты, не требуют обеспечения соосности уплотнительных поверхностей корпуса и поршня со штоком. Они применяются там, где возврат плунжера в исходное положение может быть осуществлен самой нагрузкой. Перечисленные выше гидроцилиндры являются одноступенчатыми. Применяются также телескопические гидроцилиндры (рис. 3.5, г). Они имеют несколько рабочих звеньев и полный ход выходного звена равен сумме ходов всех рабочих звеньев. Благодаря этому длина корпуса гидроцилиндра в несколько раз (в зависимости от числа ступеней) меньше суммарного хода выходного звена, что обеспечивает его компактность. Телескопические цилиндры нашли широкое применение в грузоподъемных машинах и механизмах.
Различают также гидроцилиндры одностороннего и двухстороннего действия. В гидроцилиндрах одностороннего действия перемещение выходного звена под действием рабочей жидкости осуществляется только в одном направлении, например под действием нагрузки (рис. 3.5, в) или пружины (рис. 3.5, д). Применение таких гидроцилиндров упрощает гидравлическую схему и позволяет в некоторых случаях повысить надежность работы машины в целом по сравнению с гидроцилиндрами двухстороннего действия (рис. 3.5, а, б, г]. Принципиальные гидравлические схемы гидроприводов поступательного движения с цилиндрами двухстороннего и одностороннего действия показаны на рис. 3.6. Устройства, входящие в состав привода, имеют те же функциональные назначения, что и в гидроприводе с гидромотором (см. рис. 3.3). Скорость движения выходного звена гидроцилиндра равна
где
При разработке конструкции гидроцилиндров важнейшей задачей является обеспечение отсутствия наружных утечек рабочей жидкости по штоку или плунжеру и сведение к минимуму внутренних перетечек при достаточной долговечности уплотнений и минимальных силах трения. Поэтому объемный КПД гидроцилиндра можно принимать равным единице. Жесткость нагрузочной характеристики привода будет определяться только утечками в насосе, и, следовательно, будет примерно вдвое выше, чем в гидроприводе с гидромотором. Теоретическое усилие, развиваемое гидроцилиндром, определяется выражением, записанным в статическом режиме работы и с учетом принятых ранее допущений:
С учетом механических потерь в гидроцилиндре наибольшее усилие, которое может преодолеть гидроцилиндр, составляет
Механический КПД цилиндра достаточно высок и составляет Мощность, развиваемая гидроцилиндром, связана с мощностью на приводном валу насоса соотношением
Следовательно, применение гидроцилиндра в качестве исполнительного двигателя делает привод более экономичным, не говоря уже об исключительной простоте конструкции гидроцилиндра и меньшей его стоимости по сравнению с гидромотором.
В телескопических цилиндрах может обеспечиваться последовательное и одновременное выдвижение ступеней, что определяет величину и характер изменения скорости выходного звена.
Рис. 3.6. Принципиальные схемы гидроприводов поступательного движения Гидроцилиндр с последовательным выдвижением ступеней показан на рис. 3.7, а. При подаче рабочей жидкости в поршневую полость А вначале перемещается шток 2 вместе со штоком 3 относительно корпуса, так как рабочая площадь цилиндра в этом случае максимальна. Движение происходит до тех пор, пока шток 2 не дойдет до упора. Скорость перемещения в этот момент составляет.
Затем будет перемещаться шток 3 относительно неподвижных корпуса и штока 2 со скоростью
Давления, необходимые для преодоления внешней нагрузки R, соответственно будут составлять
Существенным недостатком такого гидроцилиндра является ступенчатое изменение скорости и давления в процессе перемещения выходного звена (рис. 3.7, б). Это приводит к толчкам в работе грузоподъемного устройства и ограничивает возможность повышения скорости.
Рис. 3.7. Телескопический гидроцилиндр с последовательным выдвижением ступеней
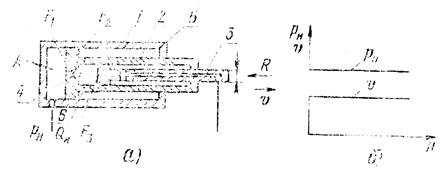
Рис. 3.8. Телескопический гидроцилиндр с одновременным выдвижением ступеней Этот недостаток устранен в телескопическом гидроцилиндре с одновременным выдвижением ступеней (рис. 3.8, а). При подаче рабочей жидкости от насоса в полость А, шток 2 перемещается вправо со скоростью
вытесняя из полости Б в полость В жидкость с расходом
Скорость движения выходного звена — штока 3 — относительно корпуса 1 будет равна
где F1, F2, F3 — рабочие площади полостей А, Б и В. Учитывая малость толщины стенки между полостями Б и В можно положить, что F1 = F2 + F3. Тогда выражение (3.14) примет вид
Обратный клапан служит для заполнения гидроцилиндра жидкостью до начала работы. При подаче рабочей жидкости в правую гидролинию шток 5, смещаясь влево, вытесняет жидкость из камеры В в камеру Б, перемещая при этом шток 2.
Рис. 3.9. Принципиальная схема гидропривода с дифференциальной схемой подключения гидроцилиндра Давление, необходимое для преодоления нагрузки выходным звеном, равно р1 =R/F3. Из условия равновесия штока 2, записанного с учетом отмеченного выше допущения
следует, что
Таким образом, преимуществом этого типа телескопического гидроцилиндра является постоянство скорости (рис. 3.8, в) выходного звена в процессе всего рабочего хода Н. Однако для преодоления одной и той же нагрузки необходимо более высокое давление, так как оно определяется площадью F3, которая обычно меньше F1 и F2 . В гидроприводах поступательного движения часто применяется дифференциальная схема подключения гидроцилиндра к насосу (рис. 3.9), В этом случае используется одноштоковый гидроцилиндр Ц, а направляющий распределитель Р имеет позицию а, в которой напорная линия соединена с двумя выходными линиями. В позиции а расход рабочей жидкости, поступающей к гидроцилиндру равен
где F — рабочая площадь поршневой полости гидроцилиндра; m = F1/F — отношение рабочих площадей гидроцилиндра; F1 — рабочая площадь штоковой полости.
Тогда скорость движения поршня гидроцилиндра вправо составит
откуда
Следовательно, дифференциальная схема подключения гидроцилиндра позволяет увеличить скорость движения поршня по сравнению с обычной схемой (рис. 3.6, а) в 1/(1—m) раз при одинаковой подаче насоса. Усилие, развиваемое штоком гидроцилиндра, в этом случае равно
Рис. 3.10. Схема применения гидромотора для поступательных движений что в (1—m) раз меньше по сравнению с обычной схемой подключения гидроцилиндра. В связи с этим нельзя использовать гидроцилиндры с большим соотношением площадей F1 и F2, так как силовые возможности гидроцилиндра уменьшаются, и их может не хватить для преодоления даже сил трения. Поэтому обычно берут mmax = 0,4 — 0,6. Применение гидроцилиндров для осуществления поступательных движений на большие расстояния имеет ряд недостатков. К ним относятся потери качества в динамике из-за увеличения сжимаемого столба рабочей жидкости, сложность изготовления корпуса гидроцилиндра и малая продольная жесткость штока. Поэтому обычно при перемещениях более 1,5 — З м применяют гидромоторы (рис. 3.10), вал которых соединяется с рабочим органом через понижающий редуктор и передачу типа «винт—гайка». Теоретическая скорость движения рабочего органа v при этом определяется из соотношения
а теоретическое усилие, развиваемое гидроприводом, R из соотношения
где tхв — шаг ходового винта; iр — передаточное отношение редуктора. При использовании гидромотора для поступательных движений по схеме рис. 3.10 надо учитывать и имеющие при этом место недостатки. Так, увеличиваются механические потери, образуется зона нечувствительности за счет зазоров в соединениях. Для повышения чувствительности такого привода вместо ходового винта применяют шариковые винты [15].
|
|||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 1961; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.246.21 (0.012 с.) |


 , (3.8)
, (3.8) — рабочая площадь гидроцилиндра, определяемая в зависимости от того, в какую полость подводится рабочая жидкость,
— рабочая площадь гидроцилиндра, определяемая в зависимости от того, в какую полость подводится рабочая жидкость,
 (3.9)
(3.9)
 = 0,9 — 0,98 [13]. Он определяется в основном потерями на трение в уплотнениях поршней и штоков (плунжеров).
= 0,9 — 0,98 [13]. Он определяется в основном потерями на трение в уплотнениях поршней и штоков (плунжеров). (3.10)
(3.10)
 (3.11)
(3.11) (3.12)
(3.12) (3.13)
(3.13)

 . Этот расход заставляет перемещаться шток 3 относительно штока 2 со скоростью
. Этот расход заставляет перемещаться шток 3 относительно штока 2 со скоростью


 ,
, , (3.15)
, (3.15) ,
, ,
, .
. , (3.17)
, (3.17)
 , (3.18)
, (3.18) , (3.19)
, (3.19)


