Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема 13. Цифро-аналоговые преобразователиСодержание книги
Поиск на нашем сайте
Динамические характеристики ЦАП Очевидно, что для цифро-аналогового преобразователя наиболее важными являются такие характеристики сигнала, как время установки (settling time), всплеск сигнала вследствие перерегулирования при изменении сигнала на выходе ЦАП, называемый далее ложным сигналом (выбросом, glitch), искажения и свободный от помех динамический диапазон сигнала (SFDR). Время установки ЦАП – это время от начала изменения цифрового кода до момента, когда сигнал стабилизируется в пределах некоторого диапазона ошибки, как это показано на рис. 13.1. Сравнивать времена установки усилителей трудно, так как их диапазоны ошибки могут отличиться от усилителя к усилителю, но диапазон ошибки ЦАП практически не меняется и равен ±1 или ±½ LSB. Время установки ЦАП состоит из четырех различных периодов: время переключения (в течение которого цифровое переключение осуществлено, но на выходе нет изменений), время перехода (в течение которого скорость изменения выходного сигнала ограничена скоростью нарастания на выходе ЦАП), время восстановления (когда ЦАП восстанавливает значение после быстрого перехода и может быть выброс на фронте) и линейное время установки (когда значение на выходе ЦАП приближается к его конечной величине экспоненциально или почти экспоненциально). Если переходное время мало по сравнению с тремя другими (как это обычно бывает в случае с токовыми выходами ЦАП), то время установки не будет существенно зависеть от перепада уровня выходного сигнала. С другой стороны, если переходное время занимает существенную часть общего времени, то время установки будет тем больше, чем больше величина перепада.
Рисунок 13.1 – Время установления ЦАП
В идеале изменения на выходе ЦАП от одной величины до другой должны проходить монотонно. На практике возможно появление выброса фронта (overshoot), отрицательного выброса перед фронтом (undershoot) или то и другое одновременно (рис. 13.2). Это неконтролируемое состояние выхода ЦАП в течение перехода известно как ложный сигнал. Он может являться результатом двух явлений: емкостной связи цифровых переходов с аналоговым выходом и свойствами некоторых ключей в ЦАП, работающих более быстро, чем другие, и создающих временные выбросы по уровню.
Рисунок 13.2 – Переходная характеристика ЦАП (с паразитными выбросами)
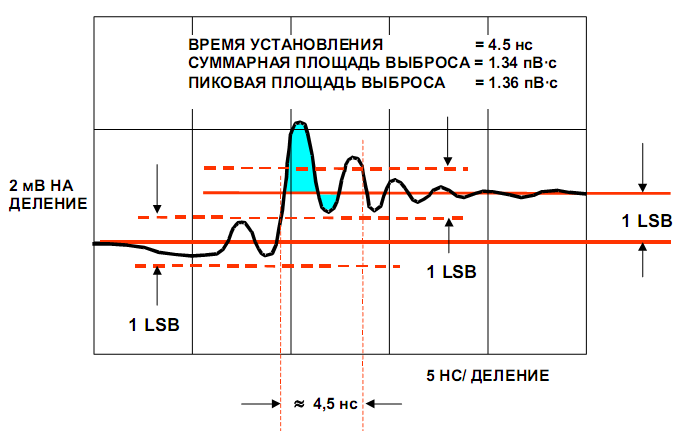
Емкостная связь часто дает примерно равные положительные и отрицательные выбросы (иногда называемые дуплетом ложного сигнала), которые далее в большей или меньшей степени удается компенсировать. Ложный сигнал, появляющийся вследствие несинхронности переключения, в общем случае униполярен, имеет большую амплитуду и представляет собой гораздо большую проблему. Для оценки ложных сигналов измеряют площадь, огибаемую фронтом такого сигнала. Пиковая площадь под кривой ложного сигнала – это площадь под максимальным положительным или отрицательным импульсом ложного сигнала. Площадь импульса ложного сигнала – это область под вольт-секундной кривой, которая может быть рассчитана после аппроксимации формы сигнала треугольниками и вычисления их площади посредством вычитания отрицательной площади из положительной. Величина ложного сигнала, порождаемого переходом между кодами 0111...111 и 1000...000, обычно является самой большой. Ложные сигналы в других точках перехода кода (таких как 1/4 и3/4 полной шкалы) обычно имеют меньшую величину. На рис. 13.3 отмечен ложный сигнал быстрого ЦАП с малым значением такого сигнала в середине его динамического диапазона. Пиковые и импульсные площади ложного сигнала рассчитываются с использованием треугольников, как это было описано выше. Время установки измеряется с момента, когда сигнал покидает начальный диапазон ошибки в 1 LSB, и до момента, когда он входит и остается в пределах конечного диапазона ошибки в 1 LSB. Размер шага между областями перехода также равен 1 LSB.
Рисунок 13.3 – Выбросы сигнала ЦАП
Время установки ЦАП важно в таких приложениях, как блок развертки RGB-сигнала в мониторах, а характеристики в частотной области типа SFDR в общем случае более важны в телекоммуникациях. Если мы рассмотрим спектр сигнала, преобразованного в ЦАП из цифровой формы, то обнаружим, что, в дополнение к ожидаемому спектру (который будет содержать одну или больше частот, в зависимости от природы восстановленного сигнала), в нем также будет присутствовать шум и составляющие искажений. Искажения могут быть определены в терминах нелинейных искажений, динамического диапазона, свободного от помех (SFDR), интермодуляционных искажений или всех вышеперечисленных вместе. Под нелинейными искажениями понимается отношение высших гармоник к гармонике основной частоты, на которой восстановлен чистый (теоретически) синусоидальный сигнал. Эти искажения являются наиболее общей характеристикой искажений.
Динамический диапазон, свободный от помех (SFDR) – это отношение энергии наибольшей из гармоник (обычно – это гармоника основной частоты, но не обязательно) к энергии основной частоты. При восстановлении с помощью ЦАП синусоидального сигнала, сгенерированного в системе прямого цифрового синтеза (DDS), зависимые от кода ложные сигналы формируют гармоники как внутри полосы, так и за ее пределами. Сигнал проходит через уровень, соответствующий середине шкалы, дважды за один цикл. Поэтому ложный сигнал имеет вторую синусоидальную гармонику, как показано на рис. 13.4. Обратите внимание, что гармоники более высокого порядка, составляющие которых попадают в основную полосу Найквиста (от 0до fs/2), не фильтруются.
Рисунок 13.4 – Проявление код-зависимых выбросов сигнала в спектре выходного сигнала
Руководствуясь одной лишь характеристикой площади под кривой ложного сигнала, трудно предсказать нелинейное искажение или SFDR. Другие факторы, такие как полная линейность ЦАП, также способствуют возникновению искажений. Поэтому, общепринята проверка восстановительной способности ЦАП в частотной области (с использованием анализатора спектра) на различных тактовых и сигнальных частотах.
Спад частотной характеристики ЦАП sin (x)/x Выходной сигнал ЦАП может быть представлен в виде ряда прямоугольных импульсов шириной, равной обратной величине тактовой частоты, как показано на рис. 13.5. Обратите внимание, что восстановленная амплитуда сигнала составляет -3,92 дБ на частоте Найквиста fс/2. Для компенсации этого эффекта в большинстве случаев достаточно использовать инверсный фильтр sin(x)/x. Значения составляющих основной частоты также ослабляются функцией sin(x)/x.
Рисунок 13.5 – Спектр выходного сигнала ЦАП с огибающей вида sin x/x
СТРУКТУРЫ ЦАП Большинство обычно используемых структур ЦАП (отличных от простого одноразрядного ЦАП, основанного на одном коммутаторе с использованием опорного напряжения) являются двоичными взвешивающими ЦАП или многозвенными схемами лестничного типа. Одна из простейших структур – делитель Кельвина, представленный на рис. 13.6. N-разрядная версия этого ЦАП просто содержит 2N равных по величине последовательно соединенных резисторов. Выходной сигнал снимается с соответствующего отвода замыканием одного из 2N коммутаторов после декодирования N-разрядных данных. Современные ЦАП, использующие эту архитектуру, называются строковыми ЦАП. Эта архитектура проста, имеет выход с изменяющимся значением напряжения ZOUT, и изначально обеспечивает монотонный сигнал (даже если сопротивление одного из резисторов равно 0, OUTPUTN не может превышать OUTPUTN+1). Архитектура линейна, если все резисторы равны по значению, но может быть преднамеренно сделана нелинейной, если требуется нелинейный ЦАП. Так как в момент переключения работают только два коммутатора, эта архитектура обладает малым ложным сигналом (low-glitch).
Ее главным недостатком является большое количество резисторов, требуемых для обеспечения высокой разрешающей способности, поэтому в качестве отдельного устройства она обычно не используется, но, как мы увидим позже, применяется в роли компонента более сложных структур ЦАП.
Рисунок 13.6 – Делитель кельвина – простейший ЦАП с выходом напряжения
Существует аналогичный ЦАП с токовым выходом, который также состоит из 2N резисторов, или источников тока, но подключенных теперь параллельно между входом опорного напряжения и виртуальным заземленным выходом (рис. 13.7). В данном ЦАП, как только какой-либо резистор подключается к цепи, любые дальнейшие увеличения цифрового кода уже не могут его отключить. Таким образом, структура является изначально монотонной, независимо от погрешностей резисторов и, подобно предыдущему случаю, может быть сделана преднамеренно нелинейной там, где эта нелинейность требуется. Опять, как и в предыдущем случае, архитектура является редкостью, так как, если попытаться ее использовать для изготовления полного ЦАП, потребуется большое количество резисторов и коммутаторов. Но опять же она часто используется в качестве компонента в ЦАП более сложной структуры. В отличие от делителя Кельвина, этот тип ЦАП не имеет уникального названия, хотя оба типа упомянуты как полно-декодирующие (fully decoded) ЦАП или строковые (string) ЦАП.
Рисунок 13.7 – Простейший ЦАП с токовым выходом
Полно-декодирующие ЦАП часто используются как компоненты более сложных ЦАП. Наиболее популярными являются сегментные ЦАП, где часть выходного сигнала полно-декодирующего ЦАП в дальнейшем вновь поступает на делитель. Данная структура используется потому, что полно-декодирующий ЦАП изначально монотонен, так что, если последующий делитель тоже монотонен, в целом является таковым же и результирующий ЦАП. В сегментных ЦАП с выходом по напряжению (рис. 13.8) сигнал подается с одного из резисторов делителя Кельвина на новый делитель Кельвина (в этом случае полная структура известна как "делитель Кельвина-Варлея") или на ЦАП какой-либо другой структуры.
Рисунок 13.8 – Сегментные ЦАП с выходом напряжения
Во всех ЦАП выходной сигнал представляет собой результат комбинации опорного напряжения и цифрового кода. В этом смысле все ЦАП являются перемножающими, но многие из них хорошо работают только в ограниченном диапазоне Vref. Настоящие перемножающие ЦАП (MDAC) ориентированы на работы в широком диапазоне Vref.
АРХИТЕКТУРЫ ЦАП С МАЛЫМИ ИСКАЖЕНИЯМИ Фактически, все высокоскоростные ЦАП с малыми искажениями используют некоторый вид режима токовой коммутации без ненасыщения. Как сказано выше, прямой двоичный ЦАП с одним токовым ключом на разряд дает кодозависимые ложные сигналы и, конечно, не является наиболее оптимальной архитектурой (рис. 13.9). ЦАП с одним токовым источником на кодовый уровень не имеет кодозависимых ложных сигналов, но не практичен в реализации, когда требуется достижение высокой разрешающей способности. Тем не менее, эта характеристика может быть улучшена, если декодировать несколько первых старших разрядов (MSB) в код "термометра" при одном токовом ключе на уровень.
Рисунок 13.9 – Архитектуры 5-разрядных двоичных ЦАП
Тема 15. Микропроцессоры
Основные понятия Микропроцессор (МП) − функционально законченное программно-управляемое устройство, предназначенное для обработки данных и управления процессом этой обработки, выполненное в виде одной или нескольких БИС. Микропроцессорная система (МС) − цифровое устройство или цифровая система (система обработки данных, контроля и управления), построенная на базе одного или нескольких МП. Программно-аппаратный принцип построения МС − один из основных принципов их организации. Этот принцип заключается в том, что реализация целевого назначения МС достигается не только аппаратными средствами, но и с помощью программного обеспечения. Микропроцессорная БИС − интегральная микросхема, выполняющая функцию МП или его части. По существу − это БИС с процессорной организацией, разработанная для построения микросистем. МП БИС относятся к особому классу микросхем, одной из особенностей которого является возможность программного управления БИС с помощью определенного набора команд. Кроме МП БИС существуют также интегральные схемы, выполняющие функции памяти и интерфейсов периферийных устройств. Микропроцессорный комплект (микропроцессорные средства) - совокупность конструктивно и электрически совместимых ИС, предназначенных для совместного применения при построении микропроцессорных систем. Включает базовый комплект (процессор или процессорные секции) и расширенный комплект (тактовые генераторы, ЗУ, интерфейсные схемы, контроллеры внешних устройств) Микро-ЭВМ – устройство обработки данных на основе микропроцессорных средств, содержащее процессор, устройства постоянной и оперативной памяти, устройства управления вводом-выводом информации и контроллеры внешних устройств. Микроконтроллер − однокристальная микроЭВМ с небольшими вычислительными ресурсами и упрощенной системой команд, ориентированная на выполнение процедур управления различным оборудованием (а не на производство вычислений). Особенностью микроконтроллеров является расширенная реализация периферийных средств на кристалле. Интерфейс – совокупность унифицированных аппаратных (технических) и программных средств, необходимых для подключения устройств к системе или одной системы к другой.
Шина – группа линий передачи информации, объединенных общим функциональным признаком. Магистраль – совокупность шин, связывающих между собой все устройства микропроцессорной системы. Прерывание – временное прекращение выполнения текущей программы и переход к выполнению программы обслуживания устройства, вызвавшего прерывание. Алгоритм – набор предписаний, однозначно определяющих содержание и последовательность выполнения операций для решения определенной задачи. Программа – последовательность инструкций, реализующих алгоритм. Команда – предписание, определяющее шаг процесса выполнения программы.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 1609; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.219.213 (0.014 с.) |