
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приклад виконання лабораторної роботи №1Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
ЗМІС Ввввввввввввввввввввввввввввввввввввввввввввввввввввввввввв
Лабораторна робота №1 Тема: вивчення стенду та команд однокристальної ЕОМ КР1816ВЕ31. Мета роботи: вивчення функціональних можливостей навчально-налагоджувального стенду, внутрішньої структури і системи команд ОЕВМ КР1816ВЕ31. Навчальне завдання: вивчення команд пересилок, арифметичних, логічних команд, команд переходів. Взаємодія внутрішніх вузлів ОЕВМ. Порядок виконання 1. Вивчити структурну схему стенду, розподіл нам’яті, призначення вузлів. Вивчити структуру ОЕВМ КР1816ВЕ31. Вивчити синтаксис команд пересилки, арифметичних команд, команд переходів. 2. Розробити алгоритм для виконання індивідуального завдання до початку лабораторного заняття (таблиця завдань №1). 3. Розробити програму для виконання індивідуального завдання до початку лабораторного заняття. 4. Ввести програму індивідуального завдання на ПК. 5. Вивчити програмно налагоджувальні засоби (ПНЗ) для КР1816ВЕ31. 6. За допомогою ПНЗ проаналізувати виконання індивідуальної програми. 7. Завантажити програму в стенд ОЕВМ. Переконатися в правильному виконанні індивідуального завдання, при негативному результаті здійснити зміну алгоритму або програми. Повторити завантаження програми в стенд ОЕВМ. 8. Роздрукувати лістинг правильно працюючої програми. 9. Відповісти на контрольні питання викладача. Контрольні птання 1. Час виконання команд (поняття такту, машинного циклу). 2. Типи команд. Формат команд. Команди прямої і непрямої адресації. 3. Команди зсуву. Арифметичні команди. Логічні команди. 4. Регістр ознак, команди які викликають зміну регістра ознак. 5. Команди роботи з стеком, послідовність дій (команд) при роботі з стеком. 6. Призначення внутрішніх вузлів ОЕВМ. 7. Призначення і робота з внутрішньою пам’яттю даних ОЕВМ. 8. Система переривання ОЕВМ. Призначення портів ОЕВМ. 9. Фізичні характеристики вихідних сигналів ОЕВМ. Короткі теоретичні відомості Додаток №4 Приклад виконання лабораторної роботи №1 Вміст регістрів R1 і R4 скласти і відобразити на індикаторі ORG 0 mov Rl,#04h;записати в R1 число 04 mov R4,#30h;встановити в R4 число 3О mov DPTR, #OBOOOh встановити на DPTR адресу lнд. DD17, DD18 mov A,Rl;записати в А значення R1 add A,R4;скласти значення в А і R4 результат суми в А movx @DPTR,A;засвітити на Інд. DD17,DD18 число збережене з А mоv A, #00h;обнулити А Con: jmp Con;перехід на зациклення програми END Варіанти індивідуальних завдань Таблиця 1 Таблиця завдань до л.о. №1
Лабораторна робота №2 Тема: програмування паралельного інтерфейсу КР580ВВ55. Схеми відображення інформації. Мета роботи: вивчення схем динамічної і статичної індикації. Навчальне завдання: розробка програм для ОЕВМ КР1816ВЕ31 для відображення цифрової інформації на пристроях динамічного і статичного типу, а також на одиничних індикаторах. Порядок виконання 1. Вивчити принцип роботи різних методів відображення. 2. Розробити алгоритм для виконання індивідуального завдання до початку лабораторного заняття. 3. Розробити програму для виконання індивідуального завдання до початку лабораторного заняття з використовування підпрограм. 4. Ввести програму індивідуального завдання на персональному комп’ютері. 5. Вивчити програмно налагоджувальні засоби (ПНЗ) для КР1816ВЕ31. 6. За допомогою ПНЗ проаналізувати виконання індивідуальної програми 7. Завантажити програму в стенд ОЕВМ. Переконатися в правильному виконанні індивідуального завдання, при негативному результаті здійснити зміну алгоритму або програми. Повторити завантаження програми в стенд ОЕВМ. 8. Роздрукувати лістинг правильно працюючої програми. 9. Відповісти на контрольні питання викладача. Контрольні питання 1. Призначення, програмування паралельного інтерфейсу КР580ВВ55. Призначення і сфера вживання пристроїв з статичним і динамічним методом відображення. 2. Розрахунок часу регенерації для динамічного методу відображення. 3. Обґрунтовування необхідності вживання різних методів відображення. 4. Схемотехнічні рішення для побудови схем відображення інформації. 5. Схеми включення одиничних індикаторів. 6. Включення рідкокристалічних індикаторів. 7. Включення газорозрядних індикаторів. Теоретичні відомості До складу інтегральної мікросхеми К580ВВ55 (ІМС) програмованого паралельного інтерфейсу входить: 1. Пристрій управління введенням-виведенням. 2. Двонаправленний буфер даних. 3. Порти А і В, 8-ми розрядні регістри з шинними формувачами. 4. Порт 3, два 4-х розрядні регістри з шинами формувачами. 5. Регістр керуючого слова. Порт А і старша половина порту 3 може об’єднатися в групу А. Порт В і молодша половина порту 3 може об’єднатися в групу В. Для забезпечення працездатності ІМС необхідно записати керуюче слово. Керуюче слово ініціалізації визначає режим роботи і напрям передачі даних.
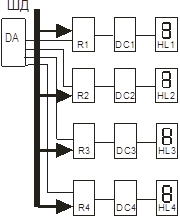
Рисунок 2.1 - Включення одиничних індикаторів Для відображення цифрової інформації найбільшого поширення набули семисегментні індикатори, в яких зображення цифри складають з семи лінійних світлодіодних сегментів розташованих у вигляді цифри 8. На основі світлодіодів і семи сегментних індикаторів будуються підсистеми відображення інформації. При побудові підсистем відображення інформації розрізняють два підходи, динамічна і статична індикація. Статична індикація полягає в постійному підсвічуванні індикаторів HLl-n від одного джерела інформації (рис.2.2). В такій системі кожний індикатор HL1-n підключений через власний дешифратор DC1-n і регістр-защолку RG1-n до шини даних. Вибірка регістрів RG1-n проводиться за допомогою селектора адреси СА. Апаратні затрати при такій організації складають n пар регістр + дешифратор при n десяткових розрядів індикатора. В стенді адресація статичної індикації реалізована за допомогою дешифратора, мікросхеми КР555ІД7 та вихідних сигналів С82, CS3. Оскільки адреси індикаторів знаходяться в полі адресації зовнішньої пам’яті даних, то для вибірки використовується сигнал WR з процесора. Суть динамічної індикації полягає в почерговому циклічному підключенні кожного індикатора HL1-n до джерела інформації через загальну шину даних, рис 2.3. Вибірка індикатора здійснюється дешифратором DA. В регістрі RD зберігається цифровий код, призначений для відображення. В регістрі RA зберігається адреса індикатора.
DA - дешифратор адреси, необхідний для вибірки відповідного регістра; R1-R3 - регістри, в яких тимчасово зберігається значення коду числа для відображення (відповідний регістр вибирається DA); DC1-DC3 - семи сегментні дешифратори, що перетворюють двійковий код в семи сегментний код; HL1-HL3 - семи сегментні індикатори; ШД - шина даних, по якій здійснюється передача даних на індикацію Рисунок 2.2 - Структурна схема статичної індикації
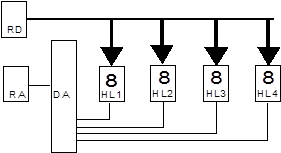
RD - регістр даних для тимчасового зберігання числа або символу, що відображається; RA - регістр адреси для тимчасового зберігання двійкового коду адреси вибираного індикатора; DA - дешифратор адреси, позиція задається двійковим кодом; HL1-HL4 - семисегментні індикатори Рисунок 2.3 - Структурна схема динамічної індикації При такому включенні значно зменшуються апаратні витрати. Але необхідно забезпечити достатній час свічення одного індикатора, для того, щоб не зменшувалася яскравість. Також необхідно забезпечити таку частоту перебору індикаторів, щоб не було помітне мерехтіння. Переваги такого способу помітні при кількості десяткових розрядів індикації більше 5. На стенді статична індикація реалізована на чотирьох статичних семисегментних двійково-десяткових індикаторах HG1 (розряди HG1.0, HG1.1, HG1.2, HG1.3). Звернення до них проводиться, як до елементів пам’яті з адресами A000h, B000h. Передача даних на індикатори здійснюється з ОЕВМ по шині даних AD(0-7). Сигнали вибірки мікросхем індикації CS2. Динамічна індикація реалізована за допомогою чотирьох розрядного семисегментного індикатора HL10 (плата розширення). Управління динамічною індикацією здійснюється за допомогою елементів DD4, DD3.1, DD3.5 (лінія даних A, B, C, D, E, F, G, H, -РВ0, Також на платі розширення встановлена матриця 5x7 світлодіодів HG7, і лінійка світлодіодів HL1-HL8. Світлодіоди запалюються записом логічних одиниць у відповідні розряди порту РА мікросхеми паралельного приймача-передавача DD10. Управління світлодіодною матрицею здійснюється по лініях РА0-РА4 і РС0-РС6 паралельного приймача-передавача DD10. Наприклад для того щоб засвітити крапку з координатами [1;1] необхідно виставити рівень логічної одиниці на лінії РА0, і рівень логічного нуля на лінії РС0. Прикіад програми дія статичної індикації З частотою 1 Гц відобразити на статичному індикаторі число 04: CSEG ORG 0 Continue: mov A, #04h;записати в Акк. число 04 mov DPTR,#0A000h;устан.в DPTR адреса lHfl.DD15,DD16 movx @DPTR,A;засвітити на Інд. DD15,DD16 Ч 04 mov DPTR,#0BOOOh;встановити на DPTR адресу lнд.DD17,DD18 movx @DPTR,A;засвітити на Інд. DD17,DD18 Ч 04 mov Rl,#0FFh;тимчасова затримка на 2 регістрах СІ: mov R2,#0FFh;з декрементом у вкладеному циклі СЗ: djnz R2, СЗ;визначає час горіння djnz Rl, C1;індикаторів mov A,#0FFh;записати в Акк. число FFh mov DPTR,#CA000h;встановити на DPTR адресу lнд.D15,DD16 movx @DPTR,A;погасити індикатори DD15,DD16 mov DPTR,#OB000h;встановити на DPTR адресу Інд. DD17,DD18 movx @DPTR,A;погасити індикатори DD17,DD18 mov Rl,#0FFh;тимчасова затримка на 2 регістрах С2: mov R2,#0FFh;c декрементом у вкладеному циклі С4: djnz R2, С4;визначає час гасіння jmp Continue;перехід на початок програми END Лабораторна робота №3 Тема: система переривань. Опитування дискретних датчиків. Мета роботи: вивчення режимів роботи системи переривання ОЕВМ, програмна обробка дискретних сигналів. Навчальне завдання: вивчення систем переривання режимів введення дискретної інформації, розробка програм опитування сигналів від датчиків. Порядок виконання 1. Вивчити систему переривання ОЕВМ К1816ВЕ31 та особливості опитування дискретних датчиків з механічними контактами. 2. Розробити алгоритм для виконання індивідуального завдання до початку лабораторного заняття. 3. Розробити програму для виконання індивідуального завдання до початку лабораторного заняття. 4. Ввести програму індивідуального завдання на ПК. 5. За допомогою ПНЗ проаналізувати виконання індивідуальної програми. 6. Завантажити програму в стенд ОЕВМ. Переконатися в правильному виконанні індивідуального завдання. При негативному результаті здійснити зміну алгоритму або програми. Повторити завантаження програми в стенд ОЕВМ. 7. Роздрукувати лістинг правильно працюючої програми. 8. Відповісти на контрольні питання викладача. Контрольні питання 1. Структура системи переривання ОЕВМ К1816ВЕ31. 2. Призначення та приклади вживання системи переривання. 3. Регістри управління та розподіл пам’яті в ОЕВМ 1816ВЕ31. 4. Переривання від таймерів, послідовного приймача-передавача. 5. Апаратне усунення брязкоту контактів для схем з TTL і КМОП. 6. Програмне усунення брязкоту контактів. 7. Необхідність вживання апаратного або програмного усунення брязкоту контактів. Теоретичні відомості Опитування дискретних сигналів. Для введення інформації широко застосовуються кнопкові перемикачі і контактні клавіатури. Сигнал таких перемикачів формується шляхом замикання (розмикання) електричного ланцюга. Сигнал, формований контактною парою, супроводжується брязкотом, тривалість якого складає ~ 8-12мс (рис. 3.1).
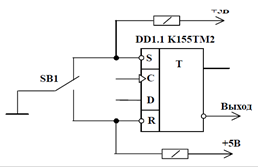
Рисунок 3.1 - Сигнал контактної пари Для усунення брязкоту в одержуваному сигналі на виході контактної пари встановлюють спеціальні формувачі. Приклад такого формувача заснованого на принципі безпосередньої установки RS-трігера приведений на рисунку 3.2.
Рисунок 3.2 - Схема усунення брязкоту за допомогою RS-рігера Для зменшення апаратних витрат застосовують програмне придушення брязкоту. Воно полягає в повторному опитуванні контактної пари з затримкою в 12мс, при збігу результатів опитування кнопка натиснута, інакше в результаті першого опитування був зафіксований брязкіт. Структура переривань Механізм переривань в ОМЕВМ дозволяє автоматично реагувати на зовнішні і на внутрішні події (переповнювання таймерів/лічильників, завершення послідовного обміну). Кожне з зовнішніх переривань /INTO, /INT1 може бути активізоване по рівню або по фронту сигналів Р3.2, Р3.3 за допомогою бітів ІТ0 і 1Т1 регістра TCON. Під час поступлення запиту зовнішнього переривання /INTx встановлюється прапор ІЕх регістра TCON. Очищення прапора ІЕх проводиться апаратно: при перериванні по фронту ІЕх скидається при зверненні до відповідної підпрограми обробки переривання; при перериванні по рівню прапора очищається при знятті запиту зовнішнього переривання, тобто в ІЕх відстежується стан виводу /INTx. Щоб зовнішнє переривання по рівню було розпізнано, необхідне, щоб низький рівень на виводу INTx утримувався не менше 12 періодів сигналу тактової частоти. Якщо ж переривання активізується по переходу з стану високого рівня в стан низького рівня, то циклу низького рівня повинен передувати цикл високого рівня на виводі /INTx. Якщо зовнішнє переривання активізується по рівню, запит повинен утримуватися до початку обслуговуючої підпрограми і зніматися перед завершенням цієї підпрограми для запобігання повторного обслуговування. Переривання від таймерів/лічильників виконуються по прапорах TF0 і TF1 регістра TCON, які встановлюються при переповнюванні відповідних регістрів таймерів/лічильників (за винятком режиму 3). Очищення прапорів TF0 і TF1 відбувається при переході до підпрограми обслуговування переривання. Переривання від послідовного порту виконується по прапору закінчення прийому RI або по прапору закінчення передачі ТІ, які зупиняються в регістрі SCON. На відміну від всієї решти прапорів, RI і ТІ скидаються тільки програмним шляхом звичайно в межах підпрограми обробки переривання, де визначається, якому з прапорів RI або ТІ відповідає переривання. У разі одночасного надходження запитів переривання з однаковим рівнем пріоритету, рівним 0 або 1, обробка їх проводиться в порядку внутрішнього опитування прапорів: ІЕО≥TFO≥ТЕ1≥TF1≥ (ТІ + RI) Установка прапорів переривання відбувається в кінці машинного циклу, а їх опитування в наступному циклі. Лише після виконання останнього циклу поточної команди проводиться апаратний виклик відповідної підпрограми обслуговування, еквівалентний команді LCALL. В загальному випадку, звернення до підпрограми обслуговування затримується при виконанні хоча б однієї з наступних умов: - проводиться обробка переривання з таким же або вищим пріоритетом; - поточний машинний цикл (цикл опитування прапору) не є останнім циклом виконуваної команди; - виконувана команда поточної програми RETI або будь-яка команда звернення до регістрів IE, IP. В останній умові після закінчення однієї з вищезгаданих команд обов’язково виконається ще одна команда поточної програми перед викликом підпрограми обслуговування переривання. Прапор переривання, встановлений під час дії блокування переривання по одному з трьох вказаних умов і скинений до їх зняття, не викличе обслуговування відповідного запиту переривання. Підпрограма обслуговування переривання триває до виконання команди RETI по якій відновлюється стан логіки переривання і стан програмного лічильника PC з двох верхніх комірок стека. При використовуванні команди RET відновлюється тільки стан програмного лічильника, а стан логіки переривання залишається незмінним. Таблиця 3.3 - Початкові адреси векторів переривань
У складі навчально-налагоджувального стенду є дві окремі кнопки S10-S11, які можуть опитуватися, як програмно, так і за допомогою використовування функцій переривань INT0-INTІ відповідно. У складі навчально-налагоджувального стенду є матрична 3x4 клавіатура S1-S12. Клавіатура підключена до шини даних ОЕВМ за допомогою мікросхеми буфера DD1 74245(АП6).
Таблиця 3.4 - Опитування клавіатури
Лабораторна робота №4 Тема: цифроаналогове перетворення Мета роботи: вивчення методів цифроаналогового перетворення Навчальне завдання: розробка програм для формування різних аналогових сигналів. Порядок виконання 1. Вивчити структурну схему модуля ЦАП на платі розширення. 2. Розробити алгоритм для виконання індивідуального завдання до початку лабораторного заняття. 3. Розробити програму для виконання індивідуального завдання до початку лабораторного заняття. 4. Ввести програму індивідуального завдання на персональному комп’ютері. 5. За допомогою ПНЗ проаналізувати виконання індивідуальної програми. 6. Завантажити програму в стенд ОЕВМ. Переконатися в правильному виконанні індивідуального завдання (формування заданої форми сигналу) використовуючи осцилограф, при негативному результаті здійснити зміну алгоритму або програми. Повторити завантаження програми в стенд ОЕВМ. 7. Роздрукувати лістинг правильно працюючої програми. 8. Відповісти на контрольні питання викладача. Контрольні питання 1. Методи і типи ЦАП. 2. Статичні параметри ЦАП. 3. Поняття дискретності, квантування, роздільна здатність ЦАП. 4. Характеристика перетворення та нелінійність ЦАП. 5. Напруга зсуву нуля, допустима напруга на виході ЦАП. 6. Динамічні параметри ЦАП. 7. Чинники, що впливають на погрішність ЦАП. 8. Апаратні реалізації ЦАП. 9. Приклади практичного вживання ЦАП. Теоретичні відомості Цифро-аналогові перетворювачі (ЦАП) виробляють напругу або струм та функціонально пов’язані з керуючим кодом. Застосовуються ЦАП для формування вихідних аналогових сигналів цифрових вимірювальних і обчислювальних пристроїв. Для перетворення двійкового коду в аналоговий сигнал звичайно формуються струми, пропорційні вагам розрядів коду, і потім підсумовуються ті з струмів, які відповідають ненульовим розрядам вхідного коду. Застосовуються в основному два методи ЦАП: підсумовування одиничних еталонних величин і підсумовування еталонних величин, ваги яких розрізняються. В першому при формуванні вихідної аналогової величини використовується тільки одна еталонна величина вагою в один квант. В другому методі застосовуються еталонні величини з вагою, залежною від номера розряду, і в підсумовуванні беруть участь тільки ті еталонні величини, для яких у відповідному розряді вхідного коду встановлена одиниця. У разі використовування на вході двійкового позиційного коду значення всіх розрядів поступає одночасно, і робота таких ЦАП описується виразом:
де
В перетворювачах з опорної напруги формуються еталонні величини, які відповідають значенням розрядів вхідного коду, які підсумовуються і утворюють дискретні значення вихідної аналогової величини. Класифікація ЦАП може бути проведена по ознаках: - способу формування вихідної напруги (з підсумовування напруг, розподілом напруг, підсумовуванням струмів); - роду вихідного сигналу (з струмовим виходом, виходом по напрузі); Полярності вихідної напруги (постійному, змінному) і т.д. Основні структури використовуються в ЦАП інтегрального виконання: - структури з підсумовуванням струмів; - ЦАП з зваженими резисторами в ланцюгах емітерів; - ЦАП з зваженими резисторами в ланцюгах навантаження; - ЦАП з сходовою матрицею R=2R в ланцюгах емітерів транзисторів джерел струмів; - ЦАП з вихідною сходовою матрицею R=2R. До параметрів ЦАП відносять: число розрядів n керуючого коду; номінальний вихідний струм; час встановлення вихідного сигналу після зміни вхідного керуючого коду; погрішність повної шкали; погрішність лінійності; диференціальна нелінійність. Погрішності ЦАП можуть бути виражені у відсотках або інших відносних одиницях, а також в частках кванта. Спрощена схема ЦАП для розуміння роботи перетворення вхідного коду в струм (напругу) певної величини.
Рисунок 4.1 - Спрощена схема ЦАП Якщо співвідношення резисторів ЦАП буде таким як на рисунку (8R, 4R, 2R, 1R), то при включенні всіх комутаторів, відповідно до закону Ома напруга в точці OUT дорівнюватиме напрузі VCC. Якщо включити комутатор резистора R8, напруга в точці OUT буде рівна VCC/2. Аналогічно можна дізнатися значення напруги, при різних комбінаціях вхідного коду. У складі навчально-налагоджувального стенду є мікросхема ЦАП КР572ПА1. Вона включена як десяти розрядний ЦАП з виходом по напрузі (напруга повної шкали вказується на платі розширення). Для спостереження вихідного сигналу з мікросхеми ЦАП необхідно підключити осцилограф до BNC роз’єму і замкнути перемичку J4. Цифровий код подається через лінії РА0-РА7 і РС0-РС1 мікросхеми паралельного приймача-передавача DD10. Лабораторна робота №5 Тема: аналого-цифрове перетворення. Мета роботи: навчитися вимірювати аналогову величину. Навчальне завдання: розробка програм вимірювання аналогових величин для різних методів вимірювання і типів АЦП. Порядок виконання 1. Вивчити структурну схему модуля АЦП на платі розширення. 2. Розробити алгоритм і програму для виконання індивідуального завдання до початок лабораторного заняття. 3. Ввести програму індивідуального завдання на персональному комп’ютері. 4. За допомогою ПНЗ проаналізувати виконання індивідуальної програми. 5. Завантажити програму в стенд ОЕВМ. Переконатися в правильному виконанні індивідуального завдання, змінити значення напруги, що подасться, на вхід АЦП, повторити перетворення. При негативному результаті здійснити зміну алгоритму або програми. 6. Повторити завантаження програми в стенд ОЕВМ. 7. Роздрукувати лістинг правильно працюючої програми. 8. Відповісти на контрольні запитання викладача. Контрольні питання 1. Методи і типи АЦП. 2. Статичні параметри АЦП. 3. Поняття дискретності, квантування, роздільна здатність. 4. Характеристика перетворення, диференціальної нелінійності АЦП та відхилення коефіцієнта перетворення. 5. Напруга зсуву нуля. 6. Динамічні параметри АЦП. 7. Час перетворення, час затримки запуску, час циклу перетворення, максимальна частота перетворення. 8. Поняття апертурного часу. 9. Чинники, що впливають на погрішність АЦП. 10. Апаратні реалізації АЦП. 11. Приклади практичного вживання АЦП. 12. Побудова схем АЦП за допомогою мікросхем ЦАП. Теоретичні відомості Аналогово-цифрові перетворювачі (АЦП) застосовуються у вимірювальних системах і вимірювально-обчислювальних комплексах для узгодження аналогових джерел вимірюваних сигналів з цифровими пристроями обробки і представлення результатів вимірювання. Існують різні методи побудови АЦП. Вони відрізняються по складності реалізації, перешкодостійкості та швидкодії. В системах де основним критерієм є швидкодія застосовують АЦП паралельного перетворення. Але АЦП цього типу достатньо складні в реалізації. Для n-разрядного АЦП необхідні 2n-1 компарата і паралельний дільник напруги, який виробляє 2n-1 рівнів квантування. Для реалізації систем з високою перешкодостійкістю застосовують інтегруючі АЦП. Такий АЦП складається з двох перетворювачів. Вимірювана напруга перетворюється в тривалість імпульсу, а потім тривалість імпульсу перетворюється в цифровий код. Одним з найпоширеніших є АЦП, побудований на цифро-аналоговому (ЦАП) перетворювачі. Схема цього АЦП приведена на рисунку 5.1.
Рисунок 5.1 - Схема АЦП побудованого на ЦАП Код формується лічильником, при організації жорсткої логіки, або програмно, якщо АЦП працює у складі обчислювального комплексу. Вхідний код перетворюється в аналоговий сигнал за допомогою ЦАП. Напруга з виходу ЦАП поступає на один з входів компаратора. На інший вхід подається вимірювана напруга Ux. В момент, коли напруга ЦАП буде рівна вимірюваному, компаратор формує сигнал «Stop», який свідчить про закінчення циклу вимірювання. При формуванні коду використовуються різні алгоритми. Найпростішим алгоритмом є порозрядне урівноваження. При такому підході код міняється від мінімального шляхом приросту одиниці молодшого розряду до тих пір, поки напруга ЦАП не порівняється з вимірюваною напругою. Недоліком порозрядного урівноваження є маленька швидкодія. Для скорочення часу перетворення застосовується метод половинних наближень. Урівноваження починається з старшого розряду. В цьому розряді встановлюється одиниця і читається стан компаратора. Якщо напруга ЦАП більше вимірюваного то розряд скидається, а якщо менше, то розряд зберігає свій стан. Далі таким же чином обробляється наступний розряд. Перетворення закінчується тоді, коли будуть оброблені всі розряди. В системах стеження, за якимись параметрами часто необхідно безперервно прочитувати стан датчика. Це забезпечується малим часом перетворення за рахунок вживання стежачого АЦП. Суть даного алгоритму полягає в тому, що спочатку код формується методом половинних наближень, а після порівняння з вимірюваною напругою АЦП відстежує зміну напруги. Якщо напруга росте то код порозрядно збільшується до тих пір, поки напруга ЦАП не порівняється з вимірюваним, і навпаки. АЦП побудований на мікросхемах DA2 (десятирозрядний ЦАП) і DA1 компаратор з ТТЛ виходом. Молодша частина коду зберігається в порту А мікросхеми паралельного інтерфейсу 580ВВ55 (див. схему стенду), старша частина коду зберігається в розрядах 0-1 порту С. Стан компаратора можна прочитати на введенні порту Р1.7 однокристальної ЕОМ. Про закінчення циклу перетворення також свідчить свічення світлодіода HL9. Вимірювана напруга знімається з дільника побудованого на резисторах R27, R28. Обертаючи ручку потенціометра R27 можна міняти вимірювану напругу. Лабораторна робота №6 Тема: обробка частотних і тимчасових сигналів Мета роботи: вивчення методів частотного перетворення Навчальне завдання: навчитися здійснювати вимірювання частоти, періоду, тривалість дискретних сигналів за допомогою програмованих лічильників/ таймерів ОЕВМ 1816 ВЕ31, а також з використанням зовнішнього еталонного генератора. Порядок виконання 1. Вивчити методи частотного перетворення (апаратні і за допомогою програмованих лічильників таймерів). 2. Вивчити методи вимірювання тимчасових інтервалів. 3. Розробити алгоритм для виконання індивідуального завдання до початку лабораторного заняття. 4. Розробити програму для виконання індивідуального завдання до початок лабораторного заняття. 5. Ввести програму індивідуального завдання на персональному комп’ютері. 6. За допомогою ПНЗ проаналізувати виконання індивідуальної програми. 7. Завантажити програму в стенд ОЕВМ. Переконатися в правильному виконанні індивідуального завдання. Змінити значення вимірюваної частоти, повторити перетворення, при негативному результаті здійснити зміну алгоритму або програми. 8. Роздрукувати лістинг правильно працюючої програми. 9. Відповісти на контрольні питання викладача. Контрольні питання 1. Методи і типи частотного і тимчасового перетворення. 2. Параметри частотного перетворення. 3. Чинники які впливають на погрішність частотного перетворення. 4. Поняття роздільна здатність частотного перетворення. 5. Вимірювання періоду. 6. Характеристика перетворення, нелінійність частотного перетворення. 7. Апаратні реалізації частотного і тимчасового перетворення. 8. Приклади практичного вживання частотного і тимчасового перетворення. Теоретичні відомості В системах автоматичного управління часто доводиться вимірювати такі величини як: частота
Рисунок 6.1 - При вимірюванні частоти
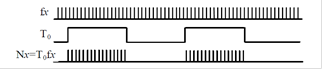
Рисунок 6.2 - Вимірювання періоду проходження методом підрахунку кількості імпульсів відомої частоти Такий метод прийнятний для вимірювання високих частот більше 100Гц. Верхня межа обмежується швидкодією елементів схеми і розрядністю лічильників.
Рисунок 14. Вимірювання зсуву фаз Вимірювання частот нижче 100Гц замінюється вимірюванням періоду Тх. При цьому робиться підрахунок імпульсів фіксованої частоти ГО за інтервал рівний або кратний вимірюваному періоду рис. 13.
При вимірюванні зсуву фаз часовий інтервал іф формують шляхом кон'юнкції сигналів fix і f2x рис. 14, одержаний інтервал часу вимірюють методом описаним вище. Схеми, що реалізовують такий алгоритм, приведені на малюнку 14.
Рисунок 15. Схеми для вимір |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 609; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.15.34 (0.015 с.) |

 PB1, PB2, РВ3, РВ4, РВ5, РВ6, РВ7) сигнали поступають з порту РВ мікросхеми паралельного приймача-передавача DD10 (див. електричну схему стенду додаток 1), сигнали вибірки відповідного індикатора поступають від лінії порту РС0, РС1 мікросхеми DD10 до дешифратора розряду DD5.
PB1, PB2, РВ3, РВ4, РВ5, РВ6, РВ7) сигнали поступають з порту РВ мікросхеми паралельного приймача-передавача DD10 (див. електричну схему стенду додаток 1), сигнали вибірки відповідного індикатора поступають від лінії порту РС0, РС1 мікросхеми DD10 до дешифратора розряду DD5.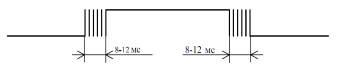
 Опитування всієї клавіатури проводиться за три рази (за один раз прочитується стан тільки одного стовпця клавіатури). Щоб провести опитування стовпця клавіатури (S1, S4, S7, S10; S2, S5, S8, S11 або S3, S6, S9, S12) необхідно виставити на відповідній лінії адреси (А0, А1, А2 для першого, другого і третього стовпця відповідно) рівень логічного нуля, а на інших лініях рівень логічної одиниці і прочитати стан буфера клавіатури, підключеного до шини даних ОЕВМ як доступний для читання елемент пам’яті з адресою 9000h. Якщо кнопка натиснута то відповідний біт в рахуючому байті буде рівний нулю, якщо ж не натиснута то одиниці.
Опитування всієї клавіатури проводиться за три рази (за один раз прочитується стан тільки одного стовпця клавіатури). Щоб провести опитування стовпця клавіатури (S1, S4, S7, S10; S2, S5, S8, S11 або S3, S6, S9, S12) необхідно виставити на відповідній лінії адреси (А0, А1, А2 для першого, другого і третього стовпця відповідно) рівень логічного нуля, а на інших лініях рівень логічної одиниці і прочитати стан буфера клавіатури, підключеного до шини даних ОЕВМ як доступний для читання елемент пам’яті з адресою 9000h. Якщо кнопка натиснута то відповідний біт в рахуючому байті буде рівний нулю, якщо ж не натиснута то одиниці.
 - аналогова величина;
- аналогова величина; - коефіцієнти відповідних двійкових розрядів, які приймають дискретні значення одиниця або нуль;
- коефіцієнти відповідних двійкових розрядів, які приймають дискретні значення одиниця або нуль; - опорний сигнал;
- опорний сигнал; - число розрядів.
- число розрядів.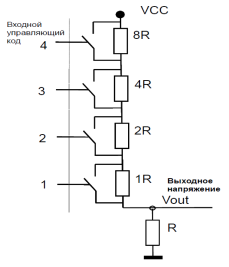

 , період
, період  , тривалість
, тривалість  , зсув фаз
, зсув фаз  . Для цього застосовується перетворення частота-код. Залежно від того, який саме параметр потрібно виміряти застосовують різний підхід.
. Для цього застосовується перетворення частота-код. Залежно від того, який саме параметр потрібно виміряти застосовують різний підхід.
 проводиться підрахунок імпульсів вхідного сигналу, протягом фіксованого відрізку часу рис. 6.1.
проводиться підрахунок імпульсів вхідного сигналу, протягом фіксованого відрізку часу рис. 6.1.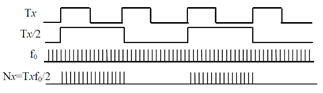



 Таким же чином вимірюється тривалість імпульсу xj, відмінність полягає лише в тому, що при вимірюванні тривалості імпульсу непотрібно ділити частоту на два.
Таким же чином вимірюється тривалість імпульсу xj, відмінність полягає лише в тому, що при вимірюванні тривалості імпульсу непотрібно ділити частоту на два.



