Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Задачи теоретической механикиСодержание книги
Поиск на нашем сайте
Задачи теоретической механики 1. Главная цель «Технической механики» (Т.М) - подготовка к изучению «Строительных конструкций (СК)»
2. И в механике, и в конструкциях – выполнение расчётов, обеспечивающих надёжность работы конструкций под нагрузкой
3. Существенные отличия в методах расчёта: А) в Т.М. расчёты более упрощенные, «грубые», а конструкции более простые; Б) в С.К. учитываются реальные свойства материалов конструкций; В) в С.К. учитываются конструктивные требования.
РАЗДЕЛ 1. СТАТИКА ТЕМА 1.1. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ (3 часа – эзс, 4 часа – арх) Основные понятия статики 1. Техническая механика – наука, в которой изучается механическое движение тел и устанавливаются общие законы этого движения.
2. Составные части теоретической механики: статика + кинематика + динамика
3. Статика – раздел теоретической механики, в котором изучаются законы приведения и условия равновесия сил, действующих на материальные точки.
4. Абсолютно твёрдое тело – расстояние между любыми двумя точками которого остаётся неизменным (тела под нагрузкой деформируются, но незначительно).
5. Сила – векторная величина, представляющая собой меру механического воздействия одних тел на другие.
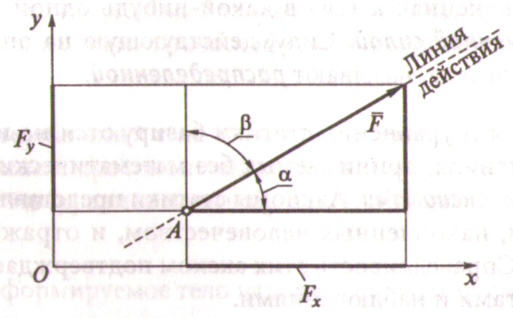
6. Сила как вектор – имеет модуль F, точку приложения А, и направление (линию действия силы).
Fх = F cosα Fу = F cosβ
Модуль вектора F, т.е. значение силы, определяют по теореме Пифагора
F = √ Fх2 + Fу2
7. Механическое воздействие – взаимодействие материальных тел, в результате которого с течением времени происходит: - изменение взаимного положения тел в пространстве (механическое движение); - изменение взаимного положения частиц тела (деформация).
8. Материальная точка – абсолютно твёрдое тело, размерами которого можно пренебречь, мысленно сосредоточив массу этого тела в точке.
9. Система сил – совокупность нескольких сил, действующих на данное тело.
10. Эквивалентные системы сил – две системы, действуя на одно и то же твёрдое тело, производят одинаковое механическое воздействие.
11. Внешние силы – силы, действующие на частицы тела со стороны других материальных тел.
12. Внутренние силы - силы, действующие на частицы тела со стороны других частиц этого же тела. 13. Уравновешенная система сил (система, эквивалентная нулю) – если под действием данной системы сил свободное тело может находиться в покое.
14. Равнодействующая системы сил – если система сил эквивалентна одной силе;
15. Сосредоточенная сила – приложенная к телу в одной точке.
16. Распределённая сила – действует на определённую часть поверхности тела.
Аксиомы статики 1. Все теоремы и уравнения статики базируются на аксиомах – результат знаний и опыта и отражают объективные процессы (самолёт или снаряд).
2. Свободное тело – тело, которое может совершать любые перемещения в пространстве.
Аксиома 1. Две силы (
Аксиома 2. Действие д анной системы сил на абсолютно твёрдое тело не изменится, если к ней прибавить или от неё отнять уравновешенную систему сил.
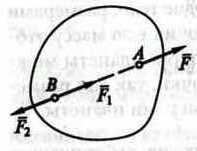
Следствие из аксиом 1 и 2. Точку приложения силы, действующей на абсолютно твёрдое тело, можно переносить вдоль её линии действия в любую другую точку тела. - в точке А к твёрдому телу приложена сила - в точке В приложим две силы - по аксиоме 2 отбросим уравновешенную систему сил - в результате на тело действует сила
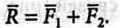
Аксиома 3. Две силы, приложенные к телу в одной точке, имеют равнодействующую, являющуюся диагональю параллелограмма, построенного на этих силах как на сторонах. Вектор R представляет собой геометрическую сумму векторов F1 и F2
Из аксиомы 3 следует, что равнодействующая двух сил, приложенных в одной точке, равна их геометрической сумме и приложена в той же точке.
Аксиома 4. Два материальных тела действуют друг на друга с силами, равными по величине и противоположно направленными. Такая система сил не является уравновешенной, так как силы приложены к разным телам.
Аксиома 5. Если деформируемое тело находится в равновесии под действием данной системы сил, то равновесие не нарушится, если тела станут абсолютно твёрдыми (аксиома затвердевания). Связи и реакции связей 1. Свободное тело – тело, которое может совершать любые перемещения в пространстве.
2. Несвободное тело – тело, на перемещение которого наложены ограничения. (В зданиях и сооружениях несвободные тела – перекрытия, стены и др.)
3. Связь – тело, ограничивающее свободу движения твёрдого тела.
4. Если приложенные силы стремятся сдвинуть тело (например, вниз), а связь препятствует перемещению, то тело действует на связь с силой давления на связь (рис).
5. По 4 аксиоме – связь действует на тело с такой же силой, но противоположно направленной. Сила реакции связи – сила, с которой связь действует на тело, препятствуя его перемещению.
6. Направление реакции связи – противоположное тому, куда связь не даёт перемещаться телу. (связь не даёт перемещаться вниз, значит - реакция связи направлена вверх)
6. Аксиома связи ( принцип освобождаемости твёрдого тела от связи) – всякое несвободное тело можно рассматривать как свободное, если мысленно отбросить наложенные на тело связи и приложить вместо них силы реакции этих связей.
7. Силы, действующие на тело, разделяют на: А) активные - заданные (приложенные к телу). Б) пассивные (реакции связей) – возникают, когда тело оказывает давление на связь.
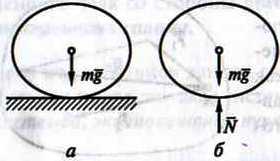
Виды связей 1. Гладкая поверхность или плоскость
- гладкая поверхность – на которой можно пренебречь трением; - тело не может перемещаться только вниз (не даёт связь); - одна реакция связи N (вектор) направлена по нормали вверх или по перпендикуляру к поверхности; - реакция приложена в точке касания. 2. Гладкая опора
- связь не даёт перемещаться телу по перпендикуляру поверхности тела в точке опоры; - одна реакция связи направлена по нормали к опоре и приложена в точках А и В 3. Гибкая нить - тело не может удалиться от точки привеса А; - одна реакция связи Т (вектор) направлена вдоль нити к точке закрепления.
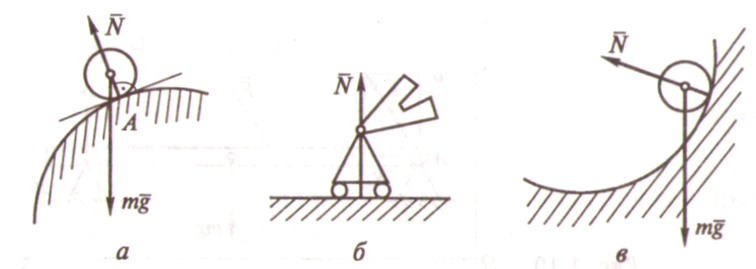
4. Цилиндрический шарнир
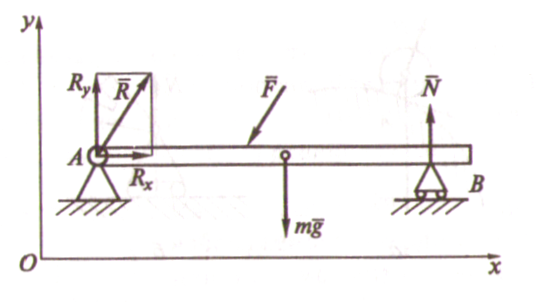
- шарнирно неподвижная опора вала: шарнир – означает допуск вращения вала, неподвижная – не допуск перемещения в плоскости хОу; – ось проходит через шарнир А перпендикулярно плоскости чертежа; - две реакции связи (шарнира) в плоскости, перпендикулярной оси вращения вала Ry и Rх, направление – проекции на оси Ох и Оу.
5. Невесомый стержень
- невесомый → пренебрегают массой: испытывает действие двух сил в шарнирах А и В; - стержень шарнирно прикреплён к телу; – оси проходят через шарниры А и В перпендикулярно плоскости чертежа; - две реакции связи (в плоскости, перпендикулярной оси вращения в шарнирах А и В) – R1 и R2; - стержень не может перемещаться ни вверх, ни вниз → реакции связи направлены к стержню (сжатие) или от стержня (растяжение) - стержень находится в равновесии → по аксиоме 1 силы равны по модулю и противоположно направлены по линии действия;
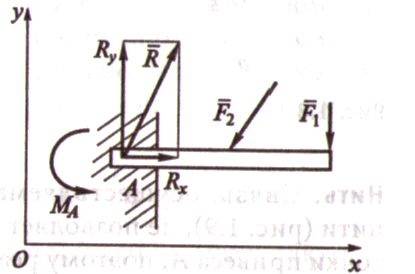
6. Жёсткая заделка
- жёсткая означает: невозможность перемещений вдоль осей Ох и Оу и поворота в плоскости хОу; - три реакции связи: Rx,Ry и МА (момент в заделке, «момент» означает изгиб Самостоятельная работа обучающихся – (2 часа – эзс, арх, авто – нет) 1. Составить глоссарий основных понятий статики 2. Изучить дополнительную информацию и составить обзорный конспект по теме «Развитие технической механики
Методика решения задач 1. При равновесии плоской системы сходящихся сил, приложенных к одному телу, число неизвестных величин не должно превышать двух (условие статической определимости): А) неизвестна одна сила (модуль и направление) Б) неизвестны направления двух сил системы В) неизвестны: модуль одной силы и направление другой; Г) неизвестны модули двух сил.
2. Методы решения задач на равновесие системы сходящихся сил: А) графический - во всех четырех случаях можно построить замкнутый силовой многоугольник и найти в нем неизвестные величины.
Б) графо-аналитический – для равновесия трех сил: в произвольном масштабе строится замкнутый треугольник, решается на основе геометрических либо тригонометрических соотношений. В) аналитический (метод проекций) - для решения задач с числом сил больше трех.
Самостоятельная работа обучающихся по теме 1.2. – (эзс, арх - 3 часа) 1. Решить задачи на определение усилий в стержнях ферм по вариантам 2. Составить краткий алгоритм решения задач на равновесие плоской системы сходящихся сил
Авто – 2 часа 1. Выполнение расчётно-графической работы по определению реакций связей плоской системы сходящихся сил аналитически и графически
Пара сил 1. Пара сил - система двух сил, приложенных к телу в двух разных точках: - равных по модулю - параллельных - противоположно направленных 2. Плечо пары сил – кратчайшее расстояние между линиями действия сил пары.
Момент пары сил Момент пары сил - произведение модуля любой силы на плечо пары (модуль силы х плечо) Свойства пары сил
1. Сумма проекций на любую ось сил пары равна нулю
F2cosα – F1cosα = 0
2. Сумма моментов сил пары относительно любой точки плоскости равна моменту пары. momo( momo( momo( Следовательно, пару сил нельзя заменить равнодействующей.
Самостоятельная работа обучающегося по теме 1.3. (1 час – все) 1. Составить глоссарий основных понятий по теме «Пара сил» - арх, ‘эзс – 1 час 1. Решение задач на определение моментов сил относительно точки: авто – 1час
Основные понятия 1. Плоская система сил – система сил, линии действия которых лежат в одной плоскости.
2. На плоскости могут быть приложены силы: А) произвольно расположенные; Б) пары сил; В) силы, сходящиеся в одной точке.
3. Плоская система произвольно расположенных сил – все силы или линии их действия не пересекаются в одной точке.
Лемма Пуансо 1. В результате произвольную плоскую системусил можно заменить: - одной силой, = геометрической сумме всех сил, приложенных в произвольно выбранном центре и - моментом, равным алгебраической сумме моментов присоединенных пар
2. Принятые определения: А) точка о – центр приведения Б) главный вектор – вектор R, равный геометрической сумме всех сил. Его значение не зависит от выбора центра приведения. В) главный момент – момент МО, равный алгебраической сумме моментов присоединённых пар. Его значение зависит от выбора центра приведения (величина плеча будет меняться). Частные случаи приведения 1.R0=0,M0≠0 – система эквивалентна паре сил с моментом, равным главному моменту системы, который в этом случае не зависит от выбора центра приведения;
2. R0≠0,M0=0 – система эквивалентна равнодействующей R. Главный вектор в данном случае – является равнодействующей.
3. R0≠0,M0≠0 – система эквивалентна равнодействующей R, приложенной в новом центре приведения, расположенном от прежнего на расстоянии d = Мо\R
4. R=0,M0=0 – плоская система сил находится в равновесии;
Класссификация нагрузок 1. Сосредоточенная 2. Распределённая: по линии, по поверхности, по объёму 3. Изгибающий момент Балочные системы 1. Объект решения задач статики – балки (или балочные системы) 2. Балка – деталь в виде прямого бруса с опорами в двух (или более) точках. Виды опор 1. Шарнирно-подвижная: вращение вокруг своей оси (шарнир) + поступательное перемещение (подвижная) 2. Шарнирно-неподвижная: вращение только вокруг своей оси (шарнир) 3. Жёсткая заделка (защемление): препятствует любому перемещению. Элементы теории трения ТЕМА 1.5. ЭЛЕМЕНТЫ ТЕОРИИ ТРЕНИЯ (авто - 1 час)
Самостоятельная работа обучающегося ( авто – 1час) 1. Решение задач по индивидуальным заданиям 1. Понятие о трении Сила трения возникает при соприкосновении тел и препятствует передвижению одного тела по поверхности другого.
2. Виды сил трения: А) трение скольжения Б) трение скольжения 3. Трение скольжения – сопротивление, возникающее при относительном перемещении одного тела по поверхности другого.
4. Законы трения: А) Сила трения Fтр направлена в сторону, противоположную относительной скорости скольжения Б) Сила трения не зависит от площади поверхностей трения В) Модуль силы трения пропорционален нормальному давлению (чем больше нормальное давление, тем больше сила трения).
5. По рисунку: А) сила тяжести mg – вниз (чем больше mg (Fгр), тем больше опорная реакция Nдавл (вектор) Б) тело движется вниз → сила трения направлена вверх по наклонной плоскости В) гладкая поверхность → опорная реакция N (вектор) направлена перпендикулярна плоскости Г) по аксиоме 3 строим диагональ параллелограмма R (равнодействующая)
6. Виды сил трения скольжения: А) сила трения при покое Fтр Б) сила трения при движении Fтр N – сила нормального давления fo – коэффициент трения покоя f – коэффициент трения скольжения – зависит от скорости скольжения тел. Оба коэффициента зависят от материала и физического состояния поверхностей
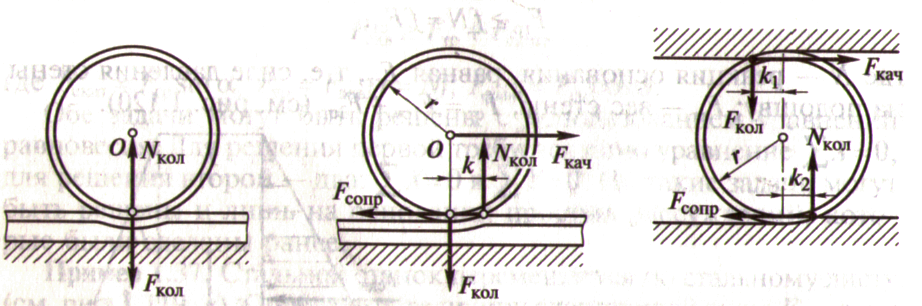
7. Трение качения – сопротивление, возникающее при качении одного тела к другому.
8. Виды связей: А) идеальные (без трения) Б) реальные (с трением)
Самостоятельная работа обучающихся – 3час эзс, 4час арх, 1. Решить задачи по определению опорных реакций для однопролётной балки по вариантам 2. Решить задачи на определение усилий в стержнях фермы по вариантам 3. Сравнить способы определения усилий, сделать краткий анализ о преимуществах и недостатках каждого метода - результат оформить в виде таблицы Авто – 2час 1. Выполнение расчётно-графической работы на определение опорных реакций балочных систем Самостоятельная работа обучающихся по теме 1.5. 1. Изучить самостоятельно тему «Аналитическое выражение для определения главного вектора и главного момента», составить опорный конспект - ( эзс – 1 час, арх – 2 час) 1. Решение задач на определение момента силы относительно оси пространственной системы произвольно расположенных сил - (авто – 1 час)
325 4. Напряжения при внецентренном сжатии – только нормальные: сумма нормальных напряжений от центрального сжатия и нормальных напряжений от прямого изгиба, т.е.
σmax, min.внец.сж. = σN + σм
5. Напряжения от продольной силы N распределяются по сечению равномерно, а напряжения от изгибающего момента – по линейному закону. 6. Случаи внецентренного сжатия
326
А) точки приложения силы – удаляются от центра Б) на рис а, б – только сжатие, сдвигается нулевая линия В) на рис в – смещение нулевой линии и появление растягивающей зоны
Рис 330 Аркуша 8. Разработка критериев предельных напряжённых состояний основывается на различных гипотезах о преимущественном влиянии того или иного фактора на прочность материала Первая гипотеза (Галилей, 17в): причина разрушения материала – наибольшее нормальное напряжение растяжения σр или сжатия σс Вторая гипотеза (Мариотт, 17в): Прочность материала в исследуемой точке достигает критического состояния при максимальном значении линейной деформации ε Третья гипотеза (Кулон, 18в): Предельное напряжённое состояние возникает, когда в двух взаимно ┴ сечениях, проведённых через исследуемую точку, наибольшие касательные напряжения достигают предельного значения, при котором возможно разрушение путём сдвига и скольжения одной части материала по другой. Четвёртая гипотеза (Мор, 1900в): - базируется не на каком-либо одном факторе σ, τ или ε - а на двух σ и τ -поэтому более совершенна - экспериментально получен критерий перехода от исследуемого напряжённого состояния А к эквивалентному В - справедлив как для пластичных, так и для хрупких материалов Пятая гипотеза (Бельтрами, 19в) – энергетическая гипотеза: - гипотеза энергии формоизменения: - критерий перехода от А к В основан на том, что - предельное напряжённое состояние возникает при - некотором значении потенциальной энергии - накапливаемой элементом конструкции при изменении только его формы → Самостоятельная работа обучающихся. (эзс – 5 час, арх – 6 час, авто – 2) 1. Выписать новые термины и коэффициенты в глоссарий. 2. Составить краткий алгоритм решения задач при расчете на прочность при косом изгибе и внецентренном сжатии 3. Построение эпюр нормальных напряжений по сечению при косом изгибе и внецентренном сжатии по вариантам
АВТО 1. Выполнение расчётно-графической работы «Расчёт на прочность при сочетании основных видов деформаций» 2. Решение задач по расчёту вала цилиндрического косозубого редуктора на совместную деформацию изгиба и кручения
Основные понятия о действии динамических нагрузок 1. Статическая нагрузка – прикладывается без ускорения или с малым ускорением, которым можно пренебречь.
2. Динамическая нагрузка: А) возникает при изменении скорости приложения нагрузки (груза) за очень короткий промежуток времени, т.е. ускоренно. Б) часто нагрузки динамические, так как изменяются во времени с большой скоростью. В) действие таких нагрузок сопровождается колебаниями сооружений и их отдельных элементов.
3. Усилия, напряжения и перемещения для динамических нагрузок больше и опаснее.
4. Виды динамических нагрузок: А) инерционные – груз ускоренно поднимается вверх, оказывая динамическое воздействие на трос; Б) ударные – груз падает с некоторой высоты (например, на плиту). Аналогичная нагрузка – при забивке сваи копром. В) подвижные – перемещение поезда по мосту Г) переменные или повторно-переменные (циклические) – действуют на элемент конструкции периодически, многократно изменяясь во времени по величине и по направлению. Пример: для отделения куска проволоки от мотка – сгибаем его в разном направлении в одном месте → знакопеременные нагрузки → усталостные разрушения → от удлинений, укорочений, прогибов, сдвигов.
5. В машинах и механизмах встречаются все виды динамических нагрузок. Они характерны для многих машиностроительных конструкций - оси, валы, штоки, пружины, шатуны и т. д – авто. 5. В строительстве чаще встречаются инерционные и ударные нагрузки
Понятие об усталости 1. Нагрузки, циклически изменяющиеся во времени по величине или по величине и по знаку, могут привести к разрушению конструкции при напряжениях, существенно меньших, чем предел текучести (или предел прочности).
2. Такое разрушение принято называть «усталостным». Материал как бы «устает» под действием многократных периодических нагрузок.
3. Усталостное разрушение – разрушение материала под действием повторно- переменных напряжений.
4. Усталость материала – постепенное накопление повреждений в материале под действием переменных напряжений, приводящих к образованию трещин в материале и разрушению.
5. Выносливость – способность материала сопротивляться усталостному разрушению. 6. Предел выносливости (предел усталости) - наибольшее значение максимального по величине напряжения цикла, которому материал может сопротивляться без разрушения неограниченно долго. 7. Виды усталости: А) многоцикловое усталостное разрушение, характеризуемое повреждением и разрушением материала за большое число циклов нагружения (более 105) при напряжениях, меньших предела текучести материала. Б) малоцикловая усталость, которая наблюдается при относительно малом числе циклов (порядка 103…105), когда действующие напряжения вызывают упругопластические деформации, что характерно для высоконапряженных конструкций.
Приближенный расчет на удар 1. Удар - это происходящее в результате соприкосновения взаимодействие движущихся тел.
2. Удар характеризуется резким изменением скоростей частиц взаимодействующих тел за малый промежуток времени, при этом сила удара достигает очень большого значения. Пример: действие молота на металл, удар груза при забивке свай, воздействие колеса вагона на рельс через стык.
3. Допущения при расчёте на удар А) за время совершения удара трудно произвести измерения силы удара. Б) производят условный расчет на удар, по которому определяют внутренние силы и перемещения в стержне. В) определяют наибольшее динамическое перемещение точки стержня, по которой наносится удар, а затем определяется напряженное состояние стержня. Г) Существуют следующие допущения при расчете стержня на удар: Допущение 1: деформация стержня, вызванная ударной нагрузкой, описывается законом Гука, а сам стержень является линейно деформируемой системой. Допущение 2: работа, совершаемая падающим грузом, полностью переходит в потенциальную энергию деформации стержня; Допущение 3: масса стержня, воспринимающего удар, пренебрежимо мала по сравнению с массой падающего груза; Допущение 4: удар считается неупругим. Задачи теоретической механики 1. Главная цель «Технической механики» (Т.М) - подготовка к изучению «Строительных конструкций (СК)»
2. И в механике, и в конструкциях – выполнение расчётов, обеспечивающих надёжность работы конструкций под нагрузкой
3. Существенные отличия в методах расчёта: А) в Т.М. расчёты более упрощенные, «грубые», а конструкции более простые; Б) в С.К. учитываются реальные свойства материалов конструкций; В) в С.К. учитываются конструктивные требования.
РАЗДЕЛ 1. СТАТИКА ТЕМА 1.1. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ (3 часа – эзс, 4 часа – арх) Основные понятия статики 1. Техническая механика – наука, в которой изучается механическое движение тел и устанавливаются общие законы этого движения.
2. Составные части теоретической механики: статика + кинематика + динамика
3. Статика – раздел теоретической механики, в котором изучаются законы приведения и условия равновесия сил, действующих на материальные точки.
4. Абсолютно твёрдое тело – расстояние между любыми двумя точками которого остаётся неизменным (тела под нагрузкой деформируются, но незначительно).
5. Сила – векторная величина, представляющая собой меру механического воздействия одних тел на другие.
6. Сила как вектор – имеет модуль F, точку приложения А, и направление (линию действия силы).
Fх = F cosα Fу = F cosβ
Модуль вектора F, т.е. значение силы, определяют по теореме Пифагора
F = √ Fх2 + Fу2
7. Механическое воздействие – взаимодействие материальных тел, в результате которого с течением времени происходит: - изменение взаимного положения тел в пространстве (механическое движение); - изменение взаимного положения частиц тела (деформация).
8. Материальная точка – абсолютно твёрдое тело, размерами которого можно пренебречь, мысленно сосредоточив массу этого тела в точке.
9. Система сил – совокупность нескольких сил, действующих на данное тело.
10. Эквивалентные системы сил – две системы, действуя на одно и то же твёрдое тело, производят одинаковое механическое воздействие.
11. Внешние силы – силы, действующие на частицы тела со стороны других материальных тел.
12. Внутренние силы - силы, действующие на частицы тела со стороны других частиц этого же тела. 13. Уравновешенная система сил (система, эквивалентная нулю) – если под действием данной системы сил свободное тело может находиться в покое.
14. Равнодействующая системы сил – если система сил эквивалентна одной силе;
15. Сосредоточенная сила – приложенная к телу в одной точке.
16. Распределённая сила – действует на определённую часть поверхности тела.
Аксиомы статики 1. Все теоремы и уравнения статики базируются на аксиомах – результат знаний и опыта и отражают объективные процессы (самолёт или снаряд).
2. Свободное тело – тело, которое может совершать любые перемещения в пространстве.
Аксиома 1. Две силы (
Аксиома 2. Действие д анной системы сил на абсолютно твёрдое тело не изменится, если к ней прибавить или от неё отнять уравновешенную систему сил.
Следствие из аксиом 1 и 2. Точку приложения силы, действующей на абсолютно твёрдое тело, можно переносить вдоль её линии действия в любую другую точку тела. - в точке А к твёрдому телу приложена сила - в точке В приложим две силы - по аксиоме 2 отбросим уравновешенную систему сил - в результате на тело действует сила
Аксиома 3. Две силы, приложенные к телу в одной точке, имеют равнодействующую, являющуюся диагональю параллелограмма, построенного на этих силах как на сторонах. Вектор R представляет собой геометрическую сумму векторов F1 и F2
Из аксиомы 3 следует, что равнодействующая двух сил, приложенных в одной точке, равна их геометрической сумме и приложена в той же точке.
Аксиома 4. Два материальных тела действуют друг на друга с силами, равными по величине и противоположно направленными. Такая система сил не является уравновешенной, так как силы приложены к разным телам.
Аксиома 5. Если деформируемое тело находится в равновесии под действием данной системы сил, то равновесие не нарушится, если тела станут абсолютно твёрдыми (аксиома затвердевания). Связи и реакции связей 1. Свободное тело – тело, которое может совершать любые перемещения в пространстве.
2. Несвободное тело – тело, на перемещение которого наложены ограничения. (В зданиях и сооружениях несвободные тела – перекрытия, стены и др.)
3. Связь – тело, ограничивающее свободу движения твёрдого тела.
4. Если приложенные силы стремятся сдвинуть тело (например, вниз), а связь препятствует перемещению, то тело действует на связь с силой давления на связь (рис).
5. По 4 аксиоме – связь действует на тело с такой же силой, но противоположно направленной. Сила реакции связи – сила, с которой связь действует на тело, препятствуя его перемещению.
6. Направление реакции связи – противоположное тому, куда связь не даёт перемещаться телу. (связь не даёт перемещаться вниз, значит - реакция связи направлена вверх)
6. Аксиома связи ( принцип освобождаемости твёрдого тела от связи) – всякое несвободное тело можно рассматривать как свободное, если мысленно отбросить наложенные на тело связи и приложить вместо них силы реакции этих связей.
7. Силы, действующие на тело, разделяют на: А) активные - заданные (приложенные к телу). Б) пассивные (реакции связей) – возникают, когда тело оказывает давление на связь.
Виды связей 1. Гладкая поверхность или плоскость
- гладкая поверхность – на которой можно пренебречь трением; - тело не может перемещаться только вниз (не даёт связь); - одна реакция связи N (вектор) направлена по нормали вверх или по перпендикуляру к поверхности; - реакция приложена в точке касания. 2. Гладкая опора
- связь не даёт перемещаться телу по перпендикуляру поверхности тела в точке опоры; - одна реакция связи направлена по нормали к опоре и приложена в точках А и В 3. Гибкая нить - тело не может удалиться от точки привеса А; - одна реакция связи Т (вектор) направлена вдоль нити к точке закрепления.
4. Цилиндрический шарнир
- шарнирно неподвижная опора вала: шарнир – означает допуск вращения вала, неподвижная – не допуск перемещения в плоскости хОу; – ось проходит через шарнир А перпендикулярно плоскости чертежа; - две реакции связи (шарнира) в плоскости, перпендикулярной оси вращения вала Ry и Rх, направление – проекции на оси Ох и Оу.
5. Невесомый стержень
- невесомый → пренебрегают массой: испытывает действие двух сил в шарнирах А и В; - стержень шарнирно прикреплён к телу; – оси проходят через шарниры А и В перпендикулярно плоскости чертежа; - две реакции связи (в плоскости, перпендикулярной оси вращения в шарнирах А и В) – R1 и R2; - стержень не может перемещаться ни вверх, ни вниз → реакции связи направлены к стержню (сжатие) или от стержня (растяжение) - стержень находится в равновесии → по аксиоме 1 силы равны по модулю и противоположно направлены по линии действия;
6. Жёсткая заделка
- жёсткая означает: невозможность перемещений вдоль осей Ох и Оу и поворота в плоскости хОу; - три реакции связи: Rx,Ry и МА (момент в заделке, «момент» означает изгиб Самостоятельная работа обучающихся – (2 часа – эзс, арх, авто – нет) 1. Составить глоссарий основных понятий статики 2. Изучить дополнительную информацию и составить обзорный конспект по теме «Развитие т
|
||||
|
|
Последнее изменение этой страницы: 2021-04-13; просмотров: 220; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.225.195.153 (0.011 с.) |

 и
и  ), действующие на свободное абсолютно твёрдое тело, находятся в равновесии тогда и только тогда, когда они равны по модулю и направлены вдоль одной прямой в противоположные стороны.
), действующие на свободное абсолютно твёрдое тело, находятся в равновесии тогда и только тогда, когда они равны по модулю и направлены вдоль одной прямой в противоположные стороны.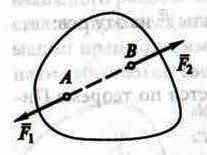







 foN
foN