
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Яка структурна схема каскадної аср.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Каскадні АСР належать до багатоконтурних систем регулювання. Найчастіше використовують дво- або триконтурні системи регулювання. На рис. 4.4. показано структурну схему двоконтурної каскадної системи регулювання:
Внутрішній контур складається з регулятора R2, який є допоміжним, BM, об’єкта регулювання OP1, перетворювачів вимірювального ВП1 та проміжного ПП1. Задання Закони регулювання вибирають залежно від призначення регуляторів. Для підтримання основної координати на заданому значенні без статичної помилки закон регулювання основного регулятора має містити інтегральну складову, тобто, слід використовувати регулятор ПІ або ПІД. Від допоміжного регулятора потрібна, насамперед, швидкодія, тому він може мати будь-який закон регулювання, навіть пропорційний як найпростіший і достатньо швидкодіючий.
13. Які типи регуляторів використовуються в каскадних АСР? На практиці для безперервних каскадних регуляторів часто в якості допоміжних регуляторів використовують П - регулятори, а в якості основних - ПІ-регулятори. У цифрових каскадних системах управління в якості допоміжних регуляторів використовують дискретні П - або ПІ-регулятори, а в якості основних - ПІ - або ПІД-регулятори. 14. За якими каналами досліджуються каскадні АСР? Дослідження каскадних систем автоматичного регулювання здійснюється за каналом регулювання, за каналом
15. У чому полягає принцип керування з додатковим імпульсом за похідною? Даний принцип полягає в тому, що на вхід регулятора в системі подається імпульс з проміжної точки, що знаходиться раніше за об’єкт регулювання, що дає випереджаючий сигнал і регулятор включається в роботу раніше, ніж вихідна координата відхилиться від заданого значення. Системи регулювання з додатковим імпульсом за похідною використовують тоді, коли об’єкт має регульований технологічний параметр, розподілений за просторовою координатою (наприклад, апарати колонного типу, трубчасті реактори, кожухотрубні теплообмінники з великою довжиною та ін.). Особливість таких об’єктів полягає в тому, що основною регульованою координатою є технологічний параметр на виході з апарата, збурення розподілені за довжиною апарата, а регулюючий вплив подається на його вхід. При цьому одноконтурні замкнені системи регулювання не забезпечують необхідної якості перехідних процесів через велику інерційність каналу регулювання.
16. Яка структурна схема АСР із впливом за допоміжною похідною?
17. У чому полягає принцип непов’язаного регулювання? При незв'язаному регулюванні кожен регулятор впливає на свій сервомотор, в той час як при пов’язаному регулятори декількох головних регульованих величин взаємопов'язані між собою поза технологічним процесом і впливають один на одного в процесі регулювання - при цьому кожна головна регульована величина складного об'єкта може регулюватися як одним регулятором, так і групою регуляторів, що складається з одного регулятора головною регульованої величини і одного або декількох допоміжних регуляторів. 18. Яка структурна схема еквівалентного об’єкта керування?
19. У чому полягає суть і коли використовується пов’язане керування? Суть пов’язаного регулювання полягає в тому, що регулятори декількох головних регульованих величин взаємопов'язані між собою поза технологічним процесом і впливають один на одного в процесі регулювання. При цьому кожна головна регульована величина складного об'єкта може регулюватися як одним регулятором, так і групою регуляторів, що складається з одного регулятора головною регульованої величини і одного або декількох допоміжних регуляторів. 20. Яка структурна схема системи пов’язаного керування?
21. У чому полягає принцип автономності системи пов’язаного керування? Щодо об’єкта з двома входами і виходами поняття автономності визначає взаємну незалежність вихідних координат y1 і y2 при роботі двох замкнених систем регулювання. По суті умова автономноcті складається з двох умов інваріантності: першого виходу y1 відносно сигналу другого регулятора Хр2 та другого виходу y2 відносно сигналу першого регулятора Хр1. 22. Які існують схеми побудови АСР співвідношення витрат?
АСР співвідношення можуть бути з одним, двома або трьома регуляторами. Система регулювання з одним регулятором подібна до комбінованої АСР без динамічного компенсатора (рис.4.12,а). Вона містить замкнену одноконтурну систему регулювання, яка називається веденою і ланку збурення, яка називається ведучою.
23. Яка структурна схема АСР співвідношення витрат з одним регулятором?
24. Яка структурна схема АСР співвідношення витрат з двома регуляторами?
25. Які типи ланок використовуються в ролі компенсаторів при технічній реалізації Комбінованого регулювання?
|
||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 983; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.232.108 (0.011 с.) |

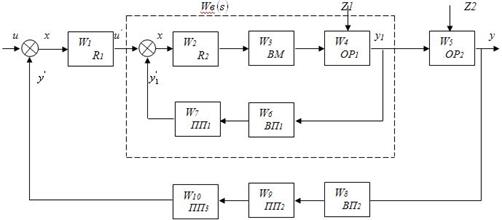
 для регулятора R2 формуються основним регулятором R1 зовнішнього контура (коректуючого), який складається з вимірювального ВП2 та проміжних ПП2 і ПП3 перетворювачів.
для регулятора R2 формуються основним регулятором R1 зовнішнього контура (коректуючого), який складається з вимірювального ВП2 та проміжних ПП2 і ПП3 перетворювачів. → Y, та за каналом
→ Y, та за каналом  , де
, де  - збурення на об’єктах регулювання, а Y – вихідний сигнал системи.
- збурення на об’єктах регулювання, а Y – вихідний сигнал системи.















 u y
u y



