
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Документи, що ведуться на спостережних пунктахСодержание книги
Поиск на нашем сайте
На кожному спостережному пункті складається схема орієнтирів і ведеться журнал розвідки і обслуговування стрільби. На командно-спостережному пункті, крім того, ведуться робоча кар та, великомасштабний планшет і схема цілей. Під час організації розвідки на сильно пересіченій місцевості і в горах при наявності достатнього часу на спостережних пунктах складають схеми полів, що не спостерігаються. Схема орієнтирів призначена для полегшення відшукування орієнтирів на місцевості, швидкої та надійної передачі (прийому) цілевказівок, для визначення положення розвіданих цілей на місцевості відносно орієнтирів, а також для прийому та передачі доповідей про розвідані цілі. Порядок вибору орієнтирів і складання схеми орієнтирів викладений у першому питанні. Журнал розвідки та обслуговування стрільби є документом, у якому враховуються (реєструються) результати розвідки противника і обслуговування стрільби (рис.33).
Рисунок 33 - Журнал розвідки і обслуговування стрільби
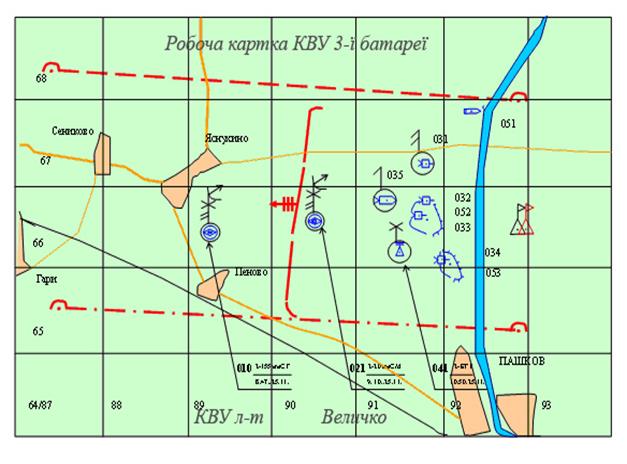
В журналі записують: номер об'єкту (цілі); час виявлення; положення цілі відносно командно-спостережного (спостережного) пункту (дані засічки); найменування об'єкту і результати спостереження, прямокутні координати об'єкту і його висоту над рівнем моря; характеристику точності засічки, а також коли і кому зроблена доповідь про ціль або висновок з вірогідності цілі. На робочу карту командира наносять: передній край противника і своїх військ, спостережні пункти і вогневі позиції свого підрозділу; смугу (сектор) розвідки і райони особливої уваги; орієнтири; основний напрямок стрільби (розвідки); цілі, розвідані зі свого спостережного пункту і отримані від інших підрозділів; інженерне обладнання, а також рубежі що намічаються для розгортання і маршрути переміщення в ході бою; дані радіаційної і хімічної розвідки; позивні посадових осіб і сигнали управління.
Рисунок 34 – Робоча карта командира взводу управління Цілі на робочу карту наносять умовними знаками (рис.35, 36). Поруч з умовним знаком приписують номер цілі; для рухомих і високоманеврових цілей, крім того, вказують дату і час виявлення, а для артилерійських (мінометних) батарей - калібр і кількість гармат (мінометів). Цілі, розташування яких визначено неточно чи які потребують додаткової розвідки, при нанесенні на карту обводяться пунктирними колом Великомасштабний планшет (рис.37) ведеться, як правило, в масштабі 1:10000. На планшет наносять умовні позначення по координатах, усі розвідані цілі (як знову виявлені, так ті що підтвердилися), визначають положення взводних опорних пунктів і систему вогню противника. Після визначення положення взводних опорних пунктів і інших цілей їх переносять з планшету на карту. Схема цілей (рис.38,39) оформлюється на кальці з нанесеною координатною сіткою, на схему наносять з карти (великомасштабного планшету) об'єкти (цілі), розвідані за певний проміжок часу з вказівкою їх координат.
Рисунок 35 - Умовні знаки для нанесення розвіданих об’єктів противника Схема полів, що не спостерігаються (рис.40) складається для визначення ділянок місцевості, які не спостерігаються зі спостережних пунктів. Під час складання схеми полів, що не спостерігаються, накреслюють на карті напрямок на місцеві предмети і висоти характерні форми, які є на карті і які спостерігаються на місцевості. На кожному з накреслених напрямків відмічають межі ділянок, що не спостерігаються, визначаючи їх на окомірно (по місцевих предметах) відповідно з рельєфом місцевості. Ділянки, що не видимі, по окремих напрямках з'єднують у поле, яке не спостерігається, відповідно з рельєфом і місцевими предметами. Невидимі ділянки покривають штрихуванням чи затушовують. Межі смуги розвідки і полів невидимості, які нанесені на карту, копіюють на кальку, на неї наносять також оцифровану координатну сітку, свій передній край і точку спостережного пункту. Обробка даних засічок
Обробка даних засічок цілей (орієнтирів, реперів) проводиться аналітичним, змішаним чи графічним методом. Метод обробки даних засічок цілей (орієнтирів, реперів) визначає командир підрозділу в залежності від обстановки і наявності часу.
Рисунок 36 - Умовні знаки для нанесення засобів розвідки, які розвідали об’єкти противника
Рисунок 37 - Нанесення цілей на великомасштабний планшет
Рисунок 38 - Перенесення цілей з великомасштабного планшету на кальку
Рисунок 39 - Схема цілей зі списком координат
Рисунок 40 - Схема полів невидимості на карті При аналітичному методі обробку проводять на обчислювачі СТМ, логарифмічній лінійці чи обчислювачі 1В520; при змішаному методі застосовують обчислювач СТМ (логарифмічну лінійку і прилад управління вогнем); при графічному методі обробку проводять на приладі управління вогнем чи карті. Під час обробки результатів засічок цілей (орієнтирів, реперів) засічених з одного спостережного пункту, проводять перетворення полярних координат у прямокутні рішенням прямої геодезичної задачі у відповідності з порядком, що викладений вище. Обробку засічок цілей (орієнтирів, реперів), засічених з пунктів спряженого спостереження на обчислювачі СТМ виконують у наступному порядку: - завчасно вписують в бланк 3 координати спостережних пунктів: лівого - - після отримання дирекційних кутів по цілі записують в бланк величини - обчислюють відліки А= - обчислюють кут засічки С=А-В або С= - обчислюють на обчислювачі довжини сторін АС і ВС по формулах: у наступному порядку: 1. Індекс движку встановлюють на величину бази ВА по шкалі чисел основного круга. 2. Обертанням рухомого круга підводять під індекс движка значення кута С по шкалі синусів; 3. Індекс движка встановлюють на величину кута В по шкалі синусів і по шкалі чисел основного круга, під індексом знімають значення АС. 4. Індекс движка встановлюють на величину кута А по шкалі синусів і по шкалі чисел основного круга, під індексом знімають значення ВС. Для визначенні цілих одиниць у відстанях АС і ВС розраховують приближену далину за формулою: Отримані величини записують в бланк (дія 7). По значеннях дирекційних кутів у наступному порядку: від лівого СП: 1. Початок шкали синусів рухомого круга суміщають з відстанню АС по шкалі чисел основного круга. 2. Індекс движка встановлюють на величину (15-00- від правого СП: 1. Початок шкали синусів рухомого круга ставлять на відстань ВС по шкалі чисел нерухомого круга. 2. Індекс движка встановлюють на величину 15- 3. Індекс движка встановлюють на величину Кількість цілих знаків в прирості координат визначають відповідно до ст. 72; отримані прирости координат із своїми знаками записують в бланк (дії 10-11); обчислюють координати цілі з лівого і правого СП, додаючи прирости координат із своїми знаками до координат відповідних спостережних пунктів (дії 12-13). Якщо різниця координат не перевищує 10 м, то за координати цілі приймають середнє арифметичне. Сходимість координат точки С, отриманих по приростах координат відносно лівого і правого СП, свідчить тільки про відсутність помилок в обчисленнях, однак не є контролем правильності вимірювальних робіт при засічці цілі (орієнтира, репера). Обчислення прямої засічки на логарифмічній лінійці проводять в тій самій послідовності, як і на обчислювачі СТМ, при цьому далину обчислюють у наступному порядку: від лівого СП: 1. Кінець шкал движку встановлюють проти величини бази ВА по шкалі чисел корпусу лінійки; 2. Риску візира встановлюють на величину кута В по шкалі синусів; 3. Переміщенням движка підводять під риску візира значення кута С по шкалі синусів або S и Т, а проти початку шкал движка на шкалі чисел корпуса лінійки знімають відстань АС від правого СП: 1. Кінець шкали движку встановлюють проти величини бази ВА по шкалі чисел корпусу лінійки. 2. Риску візиру встановлюють на величину куту А по шкалі синусів. 3. Переміщенням движку підводять під риску візиру значення куту С по шкалі синусів або S і Т, а проти початку шкал движку на шкалі чисел корпусу лінійки знімають відстань ВС. З метою контролю правильності засічки визначають далину до цілі за допомогою далекоміра. Різниця далини, що отримана під час засічки і виміряної за допомогою далекоміру, не повинна перевищувати 2% - при використанні стереоскопічного далекоміру і 1% - при використанні квантового далекоміра. При великій різниці засічку з пунктів спряженого спостереження потрібно повторити. Під час засікиі цілі з трьох спостережних пунктів надійним контролем буде схожість координат з двох баз. Різниця між отриманими координатами не повинна перевищувати 50 м. Вирішення засічки змішаним методом виконують прилади управління вогнем (ПУВ) і обчислювачі СТМ (логарифмічні лінійки). Прилад управління вогнем готують до роботи і наносять на нього пункти спряженого спостереження. Роботу виконують в такому порядку: - за допомогою обчислювача СТМ (логарифмічної лінійки) розраховують відстань до цілі; - на ПУВ встановлюють дирекційний кут з основного спостережного пункту на ціль і закріплюють лінійку відстані затискним гвинтом; - переміщують центральний вузол приладу до тих пір, доки робочий зріз лінійки не суміститься з спостережним пунктом на відстані, розрахованій від основного пункту до цілі; - по відлікових ноніусах знімають і записують координати цілі. Для контролю визначають координати цілі відносно бокового пункту спряженого спостереження. Різниця в координатах не повинна перевищувати 20 м. За кінцеві координати приймають середнє арифметичне. Обробку даних засічок графічним методом проводять на ПУВ або карті (планшеті) масштабом не менше 1:25000. Роботу на ПУВ виконують у наступному порядку: - готують прилад управління вогнем і наносять по координатах пункти спряженого спостереження; - обертаючи лінійку відстані, встановлюють ноніус кутомірної шкали відповідно директивному куту (відліку) по цілі і закріплюють лінійку відстані затискною гайкою; - переміщаючи центральний вузол, зміщують робочій зріз лінійки з точкою бокового спостереження пункту і прокреслюють напрямок на ціль; - на пересіченні прокреслених напрямків ставлять крапку, зміщують центр центрального вузла з точкою перетинання напрямків і по координатних лінійках знімають прямокутні координати цілі. Обробку даних графічним методом при засічці цілі (орієнтира, репера) далекоміром або за допомогою кутовимірювального приладу і секундоміра проводять на приладі управління вогнем в порядку викладеному вище.
|
||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 646; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.216 (0.008 с.) |








 , правого -
, правого -  , а також дирекційний кут бази -
, а також дирекційний кут бази -  (дії 1-3);
(дії 1-3); і
і  (дія 4);
(дія 4);

 і
і  (дія 8), а потім (15-00-
(дія 8), а потім (15-00-  і
і  по формулах:
по формулах:
 ;
; .
. .
.


