Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Топологические ограничения при применении мостов в локальных сетяхСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
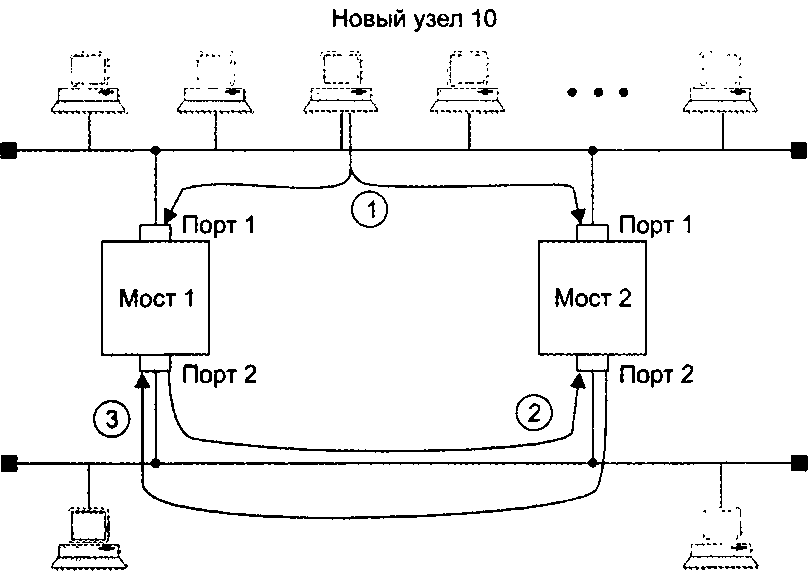
Серьезным ограничением функциональных возможностей мостов и коммутаторов является отсутствие поддержки петлеобразных конфигураций сети. Рассмотрим это ограничение на примере сети, показанной на рис. 13.7.
Рис. 13.7. Влияние замкнутых маршрутов на работу коммутаторов
Два сегмента Ethernet параллельно соединены двумя мостами, так что образовалась петля. Пусть новая станция с МАС-адресом 123 впервые начинает работу в данной сети. Обычно начало работы любой операционной системы сопровождается рассылкой широковещательных кадров, в которых станция заявляет о своем существовании и одновременно ищет серверы сети. На этапе 1 станция посылает первый кадр с широковещательным адресом назначения и адресом источника 123 в свой сегмент. Кадр попадает как в мост 1, так и в мост 2. В обоих мостах новый адрес источника 123 заносится в адресную таблицу с пометкой о его принадлежности сегменту 1, то есть создается новая запись вида: МАС-адрес 123 — Порт 1. Так как адрес назначения широковещательный, то каждый мост должен передать кадр на сегмент 2. Эта передача происходит поочередно в соответствии с методом случайного доступа технологии Ethernet. Пусть первым доступ к сегменту 2 получает мост 1 (этап 2 на рис. 13.7). При появлении кадра на сегменте 2 мост 2 принимает его в свой буфер и обрабатывает. Он видит, что адрес 123 уже есть в его адресной таблице, но пришедший кадр является более свежим, и он решает, что адрес 123 принадлежит сегменту 2, а не 1. Поэтому мост 2 корректирует содержимое базы и делает запись о том, что адрес 123 принадлежит сегменту 2: МАС-адрес 123 — Порт 2. Аналогично поступает мост 1, когда мост 2 передает свою копию кадра на сегмент 2. Далее перечислены последствия наличия петли в сети. § «Размножение» кадра, то есть появление нескольких его копий (в данном случае — двух, но если бы сегменты были соединены тремя мостами — то трех и т. д.). § Бесконечная циркуляция обеих копий кадра по петле в противоположных направлениях, а значит, засорение сети ненужным трафиком. § Постоянная перестройка мостами своих адресных таблиц, так как кадр с адресом источника 123 будет появляться то на одном порту, то на другом. В целях исключения всех этих нежелательных эффектов мосты/коммутаторы нужно применять так, чтобы между логическими сегментами не было петель, то есть строить с помощью коммутаторов только древовидные структуры, гарантирующие наличие единственного пути между любыми двумя сегментами. Тогда кадры от каждой станции будут поступать на мост/коммутатор всегда с одного и того же порта, и коммутатор сможет правильно решать задачу выбора рационального маршрута в сети.
В небольших сетях сравнительно легко гарантировать наличие одного и только одного пути между двумя сегментами. Но когда количество соединений возрастает, то вероятность непреднамеренного образования петли оказывается высокой. Возможна и другая причина возникновения петель. Так, для повышения надежности желательно иметь между мостами/коммутаторами резервные связи, которые не участвуют в нормальной работе основных связей по передаче информационных кадров станций, но при отказе какой-либо основной связи образуют новую связную рабочую конфигурацию без петель. Избыточные связй необходимо блокировать, то есть переводить их в неактивное состояние. В сетях с простой топологией эта задача решается вручную путем блокирования соответствующих портов мостов/коммутаторов. В больших сетях со сложными связями используются алгоритмы, которые позволяют решать задачу обнаружения петель автоматически. Наиболее известным из них является стандартный алгоритм покрывающего дерева (Spanning Tree Algorithm, STA), который будет детально рассмотрен в главе 14. Коммутаторы Параллельная коммутация При появлении в конце 80-х начале 90-х годов быстрых протоколов, производительных персональных компьютеров, мультимедийной информации и разделении сети на большое количество сегментов классические мосты перестали справляться с работой. Обслуживание потоков кадров между теперь уже несколькими портами с помощью одного процессорного блока требовало значительного повышения быстродействия процессора, а это довольно дорогостоящее решение. Более эффективным оказалось решение, которое и «породило» коммутаторы: для обслуживания потока, поступающего на каждый порт, в устройство ставился отдельный специализированный процессор, который реализовывал алгоритм прозрачного моста. По сути, коммутатор — это мультипроцессорный мост, способный параллельно продвигать кадры сразу между всеми парами своих портов. Но если при добавлении процессорных блоков компьютер не перестали называть компьютером, а добавили только прилагательное «мультипроцессорный», то с мультипроцессорными мостами произошла метаморфоза — во многом по маркетинговым причинам они превратились в коммутаторы. Нужно отметить, что помимо процессоров портов коммутатор имеет центральный процессор, который координирует работу портов, отвечая за построение общей таблицы продвижения, а также поддерживая функции конфигурирования и управления коммутатором.
Со временем коммутаторы вытеснили из локальных сетей классические однопроцессорные мосты. Основная причина этого — существенно более высокая производительность, с которой коммутаторы передают кадры между сегментами сети. Если мосты могли даже замедлять работу сети, то коммутаторы всегда выпускаются с процессорами портов, способными передавать кадры с той максимальной скоростью, на которую рассчитан протокол. Ну а добавление к этому возможности параллельной передачи кадров между портами предопределило судьбу и мостов, и коммутаторов. Производительность коммутаторов на несколько порядков выше, чем мостов - коммутаторы могут передавать до нескольких десятков, а иногда и сотен миллионов кадров в секунду, в то время как мосты обычно обрабатывали 3-5 тысяч кадров а секунду. За время своего существования уже без конкурентов-мостов коммутаторы вобрали в себя многие дополнительные функции, родившиеся в результате естественного развития сетевых технологий. К этим функциям относятся, например, поддержка виртуальных сетей (VLAN), агрегирование линий связи, приоритезация трафика и т. п. Развитие технологии производства заказных микросхем также способствовало успеху коммутаторов, в результате процессоры портов сегодня обладают такой вычислительной мощностью, которая позволяет им быстро реализовывать весьма сложные алгоритмы обработки трафика, например выполнять его классификацию и профилирование. Технология коммутации сегментов Ethernet была предложена небольшой компанией Kalpana в 1990 году в ответ на растущие потребности в повышении пропускной способности связей высокопроизводительных серверов с сегментами рабочих станций. У коммутатора компании Kalpana при свободном в момент приема кадра состоянии выходного порта задержка между получением первого байта кадра и появлением этого же байта на выходе порта адреса назначения составляла всего 40 мкс, что было гораздо ниже задержки кадра при его передаче мостом. Структурная схема коммутатора EtherSwitch, предложенного фирмой Kalpana, представлена на рис. 13.8.
Рис. 13.8. Структура коммутатора EtherSwitch компании Kalpana Каждый из 8 портов 10Base-T обслуживается одним процессором пакетов Ethernet (Ethernet Packet Processor, EPP). Кроме того, коммутатор имеет системный модуль, который координирует работу всех процессоров ЕРР, в частности ведет общую адресную таблицу коммутатора. Для передачи кадров между портами используется коммутационная матрица. Она функционирует по принципу коммутации каналов, соединяя порты коммутатора. Для 8 портов матрица может одновременно обеспечить 8 внутренних каналов при полудуплексном режиме работы портов и 16 — при дуплексном, когда передатчик и приемник каждого порта работают независимо друг от друга.
При поступлении кадра в какой-либо порт соответствующий процессор ЕРР буферизует несколько первых байтов кадра, чтобы прочитать адрес назначения. После получения адреса назначения процессор сразу же приступает к обработке кадра, не дожидаясь прихода остальных его байтов. 1. Процессор ЕРР просматривает свой кэш адресной таблицы, и если не находит там нужного адреса, обращается к системному модулю, который работает в многозадачном режиме, параллельно обслуживая запросы всех процессоров ЕРР. Системный модуль производит просмотр общей адресной таблицы и возвращает процессору найденную строку, которую тот буферизует в своем кэше для последующего использования. 2. Если адрес назначения найден в адресной таблице и кадр нужно отфильтровать, процессор просто прекращает записывать в буфер байты кадра, очищает буфер и ждет поступления нового кадра. 3. Если же адрес найден и кадр нужно передать на другой порт, процессор, продолжая прием кадра в буфер, обращается к коммутационной матрице, пытаясь установить в ней путь, связывающий его порт с портом, через который идет маршрут к адресу назначения. Коммутационная матрица способна помочь только в том случае, если порт адреса назначения в этот момент свободен, то есть не соединен с другим портом данного коммутатора. 4. Если же порт занят, то, как и в любом устройстве с коммутацией каналов, матрица в соединении отказывает. В этом случае кадр полностью буферизуется процессором входного порта, после чего процессор ожидает освобождения выходного порта и образования коммутационной матрицей нужного пути. 5. После того как нужный путь установлен, в него направляются буферизованные байты кадра, которые принимаются процессором выходного порта. Как только процессор выходного порта получает доступ к подключенному к нему сегменту Ethernet по алгоритму CSMA/CD[44], байты кадра сразу же начинают передаваться в сеть. Процессор входного порта постоянно хранит несколько байтов принимаемого кадра в своем буфере, что позволяет ему независимо и асинхронно принимать и передавать байты кадра (рис. 13.9).
Рис. 13.0. Передача кадра через коммутационную матрицу
Описанный пособ передачи кадра без его полной буферизации получил название коммутации «на лету» (on-the-fly), или «напролет» (cut-through). Этот способ представляет собой, по сути, конвейерную обработку кадра, когда частично совмещаются во времени несколько этапов его передачи.
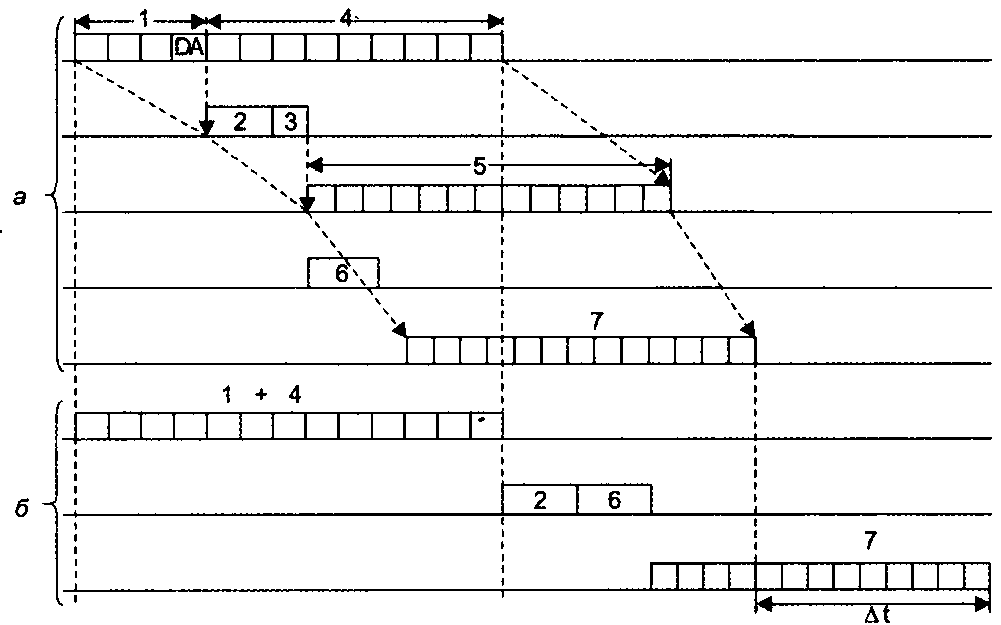
1. Прием первых байтов кадра процессором входного порта, включая прием байтов адреса назначения. 2. Поиск адреса назначения в адресной таблице коммутатора (в кэше процессора или в общей таблице системного модуля). 3. Коммутация матрицы. 4. Прием остальных байтов кадра процессором входного порта. 5. Прием байтов кадра (включая первые) процессором выходного порта через коммутационную матрицу. 6. Получение доступа к среде процессором выходного порта. 7. Передача байтов кадра процессором выходного порта в сеть. На рис. 13.10 подставлены два режима обработки кадра: режим коммутации «на лету» с частичным совмещением во времени нескольких этапов и режим полной буферизации кадра с последовательным выполнением всех этапов. (Заметим, что этапы 2 и 3 совместить во времени нельзя, так как без знания номера выходного порта операция коммутации матрицы не имеет смысла.)
Рис. 13.10. Экономия времени при конвейерной обработке кадра: а — конвейерная обработка, б — обычная обработка с полной буферизацией
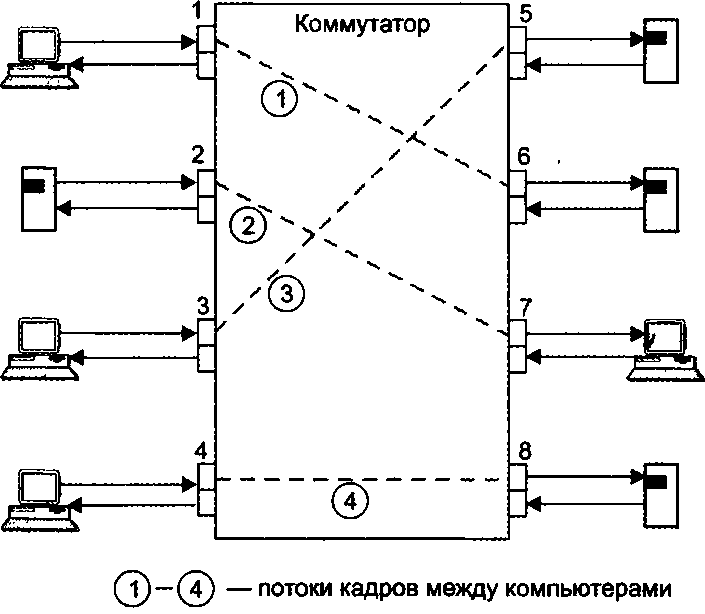
Как показывает схема, экономия от конвейеризации получается ощутимой. Однако главной причиной повышения производительности сети при использовании коммутатора является параллельная обработка нескольких кадров. Этот эффект иллюстрирует рис. 13.11, на котором показана идеальная в отношении производительности ситуация, когда четыре порта из восьми передают данные с максимальной для протокола Ethernet скоростью в 10 Мбит/с. Причем они передают эти данные на остальные четыре порта коммутатора не конфликтуя: потоки данных между узлами сети распределились так, что для каждого принимающего кадры порта есть свой выходной порт. Если коммутатор успевает обрабатывать входной трафик при максимальной интенсивности поступления кадров на входные порты, то общая производительность коммутатора в приведенном примере составит 4 х 10 = 40 Мбит/с, а при обобщении примера для N портов — (N/ 2) х 10 Мбит/с. В таком случае говорят, что коммутатор предоставляет каждой станции или сегменту, подключенному к его портам, выделенную пропускную способность протокола.
Рис. 13.11. Параллельная передача кадров коммутатором
Естественно, что в сети не всегда складывается описанная ситуация. Если двум станциям, например станциям, подключенным к портам 3 и 4, одновременно нужно записывать данные на один и тот же сервер, подключенный к порту 8, то коммутатор не сможет выделить каждой станции по 10 Мбит/с, так как порт 8 не в состоянии передавать данные со скоростью 20 Мбит/с. Кадры станций будут ожидать во внутренних очередях входных портов 3 и 4, когда освободится порт 8 для передачи очередного кадра. Очевидно, хорошим решением для такого распределения потоков данных было бы подключение сервера к более высокоскоростному порту, например Fast Ethernet или Gigabit Ethernet. Дуплексный режим работы Технология коммутации сама по себе не имеет непосредственного отношения к методу доступа к среде, который используется портами коммутатора. При подключении к порту коммутатора сегмента^ представляющего собой разделяемую среду, данный порт, как и все остальные узлы такого сегмента, должен поддерживать полудуплексный режим.
Однако когда к каждому порту коммутатора подключен не сегмент, а только один компьютер, причем по двум физически раздельным каналам, как это происходит почти во всех стандартах Ethernet, кроме коаксиальных версий Ethernet, ситуация становится не такой однозначной. Порт может работать как в обычном полудуплексном режиме, так и в дуплексном. В полудуплексном режиме работы порт коммутатора по-прежнему распознает коллизии. Доменом коллизий в этом случае является участок сети, включающий передатчик коммутатора, приемник коммутатора, передатчик сетевого адаптера компьютера, приемник сетевого адаптера компьютера и две витые пары, соединяющие передатчики с приемниками. Коллизия возникает, когда передатчики порта коммутатора и сетевого адаптера одновременно или почти одновременно начинают передачу своих кадров. В дуплексном режиме одновременная передача данных передатчиком порта коммутатора и сетевого адаптера коллизией не считается. В принципе, это достаточно естественный режим работы для отдельных дуплексных каналов передачи данных, и он всегда использовался в протоколах глобальных сетей. При дуплексной связи порты Ethernet стандарта 10 Мбит/с могут передавать данные со скоростью 20 Мбит/с — по 10 Мбит/с в каждом направлении. Уже первые коммутаторы Kalpana поддерживали оба режима работы своих портов, позволяя использовать коммутаторы для объединения сегментов разделяемой среды, как делали их предшественники-мосты, и в то же время позволяя удваивать скорость обмена данными на предназначенных для связи между коммутаторами портах за счет работы этих портов в дуплексном режиме. Долгое время коммутаторы Ethernet сосуществовали в локальных сетях с концентраторами Ethernet: на концентраторах строились нижние уровни сети здания, такие как сети рабочих групп и отделов, а коммутаторы служили для объединения этих сегментов в общую сеть. Постепенно коммутаторы стали применяться и на нижних этажах, вытесняя концентраторы, так как цены коммутаторов постоянно снижались, а их производительность росла (за счет поддержки не только технологии Ethernet со скоростью 10 Мбит/с, но и всех последующих более скоростных версий этой технологии, то есть Fast Ethernet со скоростью 100 Мбит/с, Gigabit Ethernet со скоростью 1 Гбит/с и 10G Ethernet со скоростью 10 Гбит/с). Этот процесс завершился вытеснением концентраторов Ethernet и переходом к полностью коммутируемым сетям, пример такой сети показан на рис. 13.12.
Рис. 13.12. Полностью коммутируемая сеть Ethernet
В полностью коммутируемой сети Ethernet все порты работают в дуплексном режиме, а продвижение кадров осуществляется на основе МАС-адресов. При разработке технологий Fast Ethernet и Gigabit Ethernet дуплексный режим стал одним из двух полноправных стандартных режимов работы узлов сети. Однако уже практика применения первых коммутаторов с портами Gigabit Ethernet показала, что они практически всегда применяются в дуплексном режиме для взаимодействия с другими коммутаторами или высокоскоростными сетевыми адаптерами. Поэтому при разработке стандарта 10G Ethernet его разработчики не стали создавать версию для работы в полудуплексном режиме, окончательно закрепив уход разделяемой среды из технологии Ethernet. Неблокирующие коммутаторы Как уже отмечалось, высокая производительность является одним из главных достоинств коммутаторов. С понятием производительности тесно связано понятие неблокирующего коммутатора. Коммутатор называют неблокирующим, если он может передавать кадры через свои порты с той же скоростью с которой они на них поступают. Когда говорят, что коммутатор может поддерживать устойчивый неблокирующий режим работы, то имеют в виду, что коммутатор передает кадры со скоростью их поступления в течение произвольного промежутка времени. Для поддержания подобного режима нужно таким образом распределить потоки кадров по выходным портам, чтобы, во-первых, порты справлялись с нагрузкой, во-вторых, коммутатор мог всегда в среднем передать на выходы столько кадров, сколько их поступило на входы. Если же входной поток кадров (просуммированный по всем портам) в среднем будет превышать выходной поток кадров (также просуммированный по всем портам), то кадры будут накапливаться в буферной памяти коммутатора и при переполнении просто отбрасываться. Для поддержания устойчивого неблокирующего режима работы коммутатора необходимо чтобы его производительность удовлетворяла условию Ck = (ΣCpi)/2, где Ck - производительность коммутатора, Cpi - максимальная производительность протокола поддерживаемого i-м портом коммутатора. В этом соотношении под производительностью коммутатора в целом понимается его способность продвигать определенное количество кадров, принимаемых от приемников всех его портов, на передатчики всех его портов. В суммарной производительности портов каждый проходящий кадр учитывается дважды, как входящий и как выходящий, а так как в устойчивом режиме входной трафик равен выходному, то минимально достаточная производительность коммутатора для поддержки неблокирующего режима равна половине суммарной производительности портов. Если порт, например, стандарта Ethernet со скоростью 10 Мбит/с работает в полудуплексном режиме, то производительность порта Cpi равна 10 Мбит/с, а если в дуплексном — 20 Мбит/с. Иногда говорят, что коммутатор поддерживает мгновенный неблокирующий режим. Это означает, что он может принимать и обрабатывать кадры от всех своих портов на максимальной скорости протокола независимо от того, обеспечиваются ли условия устойчивого равновесия между входным и выходным трафиком. Правда, обработка некоторых кадров при этом может быть неполной — при занятости выходного порта кадр помещается в буфер коммутатора. Для поддержки мгновенного неблокирующего режима коммутатор должен обладать большей собственной производительностью, а именно она должна быть равна суммарной производительности его портов: С k = ΣCpi Приведенные соотношения справедливы для портов с любыми скоростями, то есть портов стандартов Ethernet со скоростью 10 Мбит/с, Fast Ethernet, Gigabit Ethernet и 10G Ethernet. Способы, которыми обеспечивается способность коммутатора поддерживать неблокирующий режим, могут быть разными. Необходимым требованием является умение процессора порта обрабатывать потоки кадров с максимальной для физического уровня этого порта скоростью. В главе 12 мы подсчитали, что максимальная производительность порта Ethernet стандарта 10 Мбит/с равна 14 880 кадров в секунду. Это означает, что процессоры портов Ethernet стандарта 10 Мбит/с неблокирующего коммутатора должны поддерживать продвижение кадров со скоростью 14 880 кадров в секунду. Однако только адекватной производительности процессоров портов недостаточно для того, чтобы коммутатор был неблокирующим. Необходимо, чтобы достаточной производительностью обладали все элементы архитектуры коммутатора, включая центральный процессор, общую память, шины, соединяющие отдельные модули между собой, саму архитектуру коммутатора (наиболее распространенные архитектуры коммутаторов мы рассмотрим позже). В принципе, задача создания неблокирующего коммутатора аналогична задаче создания высокопроизводительного компьютера — в обоих случаях она решается комплексно: за счет соответствующей архитектуры объединения модулей в едином устройстве и адекватной производительности каждого отдельного модуля устройства. Борьба с перегрузками Даже в том случае, когда коммутатор является неблокирующим, нет гарантии того, что он во всех случаях справится с потоком кадров, направляемых на его порты. Неблокирующие коммутаторы тоже могут испытывать перегрузки и терять кадры из-за переполнения внутренних буферов. Причина перегрузок обычно кроется не в том, что коммутатору не хватает производительности для обслуживания потоков кадров, а в ограниченной пропускной способности отдельного выходного порта, которая определяется параметрами протокола. Другим словами, какой бы производительностью коммутатор не обладал, всегда найдется такое распределение потоков кадров, которое приведет к перегрузке коммутатора из-за ограниченной производительности выходного порта коммутатора. Возникновение таких перегрузок является платой за отказ от применения алгоритма доступа к разделяемой среде, так как в дуплексном режиме работы портов теряется контроль за потоками кадров, направляемых конечными узлами в сеть. В полудуплексном режиме, свойственном технологиям с разделяемой средой, поток кадров регулировался самим методом доступа к разделяемой среде. При переходе на дуплексный режим узлу разрешается отправлять кадры в коммутатор всегда, когда это ему нужно, поэтому в данном режиме коммутаторы сети могут сталкиваться с перегрузками, не имея при этом никаких средств «притормаживания» потока кадров. Таким образом, если входной трафик неравномерно распределяется между выходными портами, легко представить ситуацию, когда на какой-либо выходной порт коммутатора будет направляться трафик с суммарной средней интенсивностью большей, чем протокольный максимум. На рис. 13.13 показана как раз такая ситуация, когда на порт 3 коммутатора Ethernet направляется от портов 1, 2,4 и 6 поток кадров размером в 64 байт с суммарной интенсивностью в 22 100 кадров в секунду. Вспомним, что максимальная скорость в кадрах в секунду для сегмента Ethernet составляет 14 880. Естественно, что когда кадры поступают в буфер порта со скоростью 22 100 кадров в секунду, а уходят со скоростью 14 880 кадров в секунду, то внутренний буфер выходного порта начинает неуклонно заполняться необработанными кадрами.
Рис. 13.13. Переполнение буфера порта из-за несбалансированности трафика
В приведенном примере нетрудно подсчитать, что при размере буфера в 100 Кбайт полное заполнение буфера произойдет через 0,22 секунды после начала работы в таком интенсивном режиме. Увеличение размера буфера до 1 Мбайт даст увеличение времени заполнения буфера до 2,2 секунды, что также неприемлемо. Проблему можно решить с помощью средств контроля перегрузки, которые были рассмотрены в главе 7. Как мы знаем, существуют различные средства контроля перегрузки: управление очередями в коммутаторах, обратная связь, резервирование пропускной способности. На основе этих средств можно создать эффективную систему поддержки показателей QoS для трафика разных классов. В этом разделе мы рассмотрим механизм обратной связи, который был стандартизован для сетей Ethernet в марте 1997 как спецификация IEEE 802.3х. Механизм обратной связи 802.3х используется только в дуплексном режиме работы портов коммутатора. Этот механизм очень важен для коммутаторов локальных сетей, так как он позволяет сократить потери кадров из-за переполнения буферов независимо от того, обеспечивает сеть дифференцированную поддержку показателей QoS для разных типов трафика или же предоставляет базовый сервис по доставке с максимальными усилиями («по возможности»). Другие механизмы поддержания показателей QoS рассматриваются в следующей главе. Спецификация 802.3X вводит новый подуровень в стеке протоколов Ethernet — подуровень управления уровня MAC. Он располагается над уровнем MAC и является необязательным (рис. 13.14). Кадры этого подуровня могут использоваться в различных целях, но пока в стандартах Ethernet для них определена только одна задача — приостановка передачи кадров другими узлами на определенное время.
Рис. 13.14. Подуровень управления уровня MAC
Кадр подуровня управления отличается от кадров пользовательских данных тем, что в поле типа всегда содержится шестнадцатеричное значение 88-08. Формат кадра подуровня управления рассчитан на универсальное применение, поэтому он достаточно сложен (рис. 13.15).
Рис. 13.15. Формат кадра подуровня управления
Коммутатор использует кадр подуровня управления в том случае, когда ему нужно на время приостановить поступление кадров от соседнего узла, чтобы разгрузить свои внутренние очереди. В качестве адреса назначения можно указывать зарезервированное для этой цели значение группового адреса 01-80-С2-00-00-01. Это удобно, когда соседний узел также является коммутатором (так как порты коммутатора не имеют уникальных МАС-адресов). Если сосед — конечный узел, можно также использовать уникальный МАС-адрес. В поле кода операции подуровня управления указывается шестнадцатеричный код 00-01, поскольку, как уже было отмечено, пока определена только одна операция подуровня управления — она называется PAUSE (пауза) и имеет шестнадцатеричный код 00-01. В поле параметров подуровня управления указывается время, на которое узел, получивший такой код, должен прекратить передачу кадров узлу, отправившему кадр с операцией PAUSE. Время измеряется в 512 битовых интервалах конкретной реализации Ethernet, диапазон возможных вариантов приостановки равен 0-65535. Как видно из описания, этот механизм обратной связи относится к типу 2 в соответствии с классификацией, приведенной в главе 7. Специфика его состоит в том, что в нем предусмотрена только одна операция — приостановка на определенное время. Обычно же в механизмах этого типа используются две операции — приостановка и возобновление передачи кадров. Проблема, иллюстрируемая рис. 13.13, может быть решена и другим способом: применением так называемого магистрального, или восходящего (uplink), порта. Магистральные порты в коммутаторах Ethernet — это порты следующего уровня иерархии скорости по сравнению с портами, предназначенными для подключения пользователей. Например, если коммутатор имеет 12 портов Ethernet стандарта 10 Мбит/с, то магистральный порт должен быть портом Fast Ethernet, чтобы его скорость была достаточна для передачи до 10 потоков от входных портов. Обычно низкоскоростные порты коммутатора служат для соединения с пользовательскими компьютерами, а магистральные порты — для подключения либо сервера, к которому обращаются пользователи, либо коммутатора более высокого уровня иерархии. На рис. 13.16 показан пример коммутатора, имеющего 24 порта стандарта Fast Ethernet со скоростью 100 Мбит/с, к которым подключены пользовательские компьютеры, и один порт стандарта Gigabit Ethernet со скоростью 1000 Мбит/с, к которому подключен сервер. При такой конфигурации коммутатора вероятность перегрузки портов существенно снижается по сравнению с вариантом, когда все порты поддерживают одинаковую скорость. Хотя возможность перегрузки по-прежнему существует, для этого необходимо, чтобы более чем 10 пользователей одновременно обменивались с сервером данными со средней скоростью, близкой к максимальной скорости их соединений — а такое событие достаточно маловероятно.
Рис. 13.16. Коммутатор рабочей группы Из приведенного примера видно, что вероятность перегрузки портов коммутаторов зависит от распределения трафика между его портами, кроме того, понятно, что даже при хорошем соответствии скорости портов наиболее вероятному распределению трафика полностью исключить перегрузки невозможно. Поэтому в общем случае для уменьшения потерь кадров из-за перегрузок нужно применять оба средства: подбор скорости портов для наиболее вероятного распределения трафика в сети и протокол 802.3х для снижения скорости источника трафика в тех случаях, когда перегрузки все-таки возникают.
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 909; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.192.113 (0.019 с.) |