
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механические характеристики с сохранением постоянства перегрузочной способностиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Для того, чтобы работа асинхронного двигателя и электропривода в целом была надежной и кратковременные перегрузки не вызывали остановок двигателя, необходимо наличие перегрузочной способностью Перегрузочной способностью асинхронного двигателя называется отношение максимального момента Для того чтобы исследовать свойства асинхронного двигателя при частотном регулировании нужно использовать Т-образную схему замещения [11], которая изображена на рисунке 2.3.
Рисунок 2.3 – Схема замещения асинхронного двигателя при частотном регулировании
За основу для расчетов воспользуемся известной технической литературой по электроприводу [17]. Существует три основных параметра при частотном регулировании: а) относительная частота статора
б) параметр абсолютного скольжения
Данный параметр используется вместо величины скольжения
в) относительное напряжение, которое определяется формулой:
При частотном управлении по закону При неизменном параметре абсолютного скольжения На величину потока и на его характер при изменении частоты сильно влияет вид закона регулирования напряжения. К магнитным потокам в асинхронном двигателе можно отнести: поток статора, поток ротора, поток магнитного рассеяния статорной обмотки, поток магнитного рассеяния роторной обмотки, полезный поток ротора. При законе регулирования
Анализируя данную формулу, можно сказать, что при неизменном скольжении поток и момент двигателя убывают по мере снижения частоты. Максимальный момент двигателя при заданной частоте, когда
Если приравнять отношение максимальных моментов при номинальной и при заданной частоте
где
Произведем расчет для номинальной частоты
Далее определяем другие коэффициенты по формуле (2.22):
Тогда определяем закон, по которому будет регулироваться напряжение по формуле (2.21):
Определяем максимальный момент двигателя при заданной частоте по формуле (2.20):
При уменьшении нагрузки, для того, чтобы убрать возрастание потока используют дополнительное регулирование функции нагрузки пропорционального В таком случае при заданной частоте критическое скольжение не меняется, а перегрузочная способность сохраняется неизменной при любой зависимости Механическую характеристику асинхронного двигателя можно описать следующей формулой:
где
Коэффициент
Если компенсировать падение напряжения на активном сопротивлении статора, регулируя напряжение не только функцией частоты, но и скольжением, то можно исключить его негативное воздействие. Управление с компенсацией падения напряжения на активном сопротивлении статора от тока нагрузки с одновременным регулированием напряжения функции момента нагрузки является более распространенным способом. При такой регулировке можно получить режимы, близкие к номинальным. Поэтому можно подобрать такой закон регулирования Необходимо найти критическое скольжение:
Далее строим механическую характеристику по следующим формулам и заносим данные в таблицу 2.6:
Произведем расчет для частоты Найдем относительную частоту статора
Таблица 2.6 – Момент двигателя и значение угловой скорости для частоты
Далее определим другие коэффициенты:
Тогда определяем закон, по которому будет регулироваться напряжение по формуле (2.21):
Определяем максимальный момент двигателя при заданной частоте по формуле (2.20) и заносим значения в таблицу 2.7:
Далее строим механическую характеристику по следующим формулам (2.26 и 2.27).
Таблица 2.7 – Момент двигателя и значение угловой скорости для частоты
Произведем расчет для частоты Найдем относительную частоту статора
Далее определим другие коэффициенты:
Тогда определяем закон, по которому будет регулироваться напряжение по формуле (2.21):
Определяем максимальный момент двигателя при заданной частоте по формуле (2.20) и заносим значения в таблицу 2.8:
Далее строим механическую характеристику по следующим формулам (2.26 и 2.27).
Таблица 2.8 – Момент двигателя и значение угловой скорости для частоты
Произведем расчет для частоты Найдем относительную частоту статора
Далее определим другие коэффициенты:
Определяем закон, по которому регулируется напряжение:
Определяем максимальный момент двигателя при заданной частоте по формуле (2.20) и заносим значения в таблицу 2.9:
Таблица 2.9 – Момент двигателя и значение угловой скорости для частоты
Построим механическую характеристику по формулам (2.26 и 2.27). Полученные характеристики для частот 50, 40, 30 и 20 изображены на рисунке 2.4. Как видно из (рисунка 2.4), для поддержания достаточной перегрузочной способности во всем диапазоне регулирования необходимо при малых частотах уменьшать напряжение в меньшей степени, чем снижается частота. При этом будет наблюдаться одинаковый максимальный (критический) момент во всем диапазоне регулирования частот.
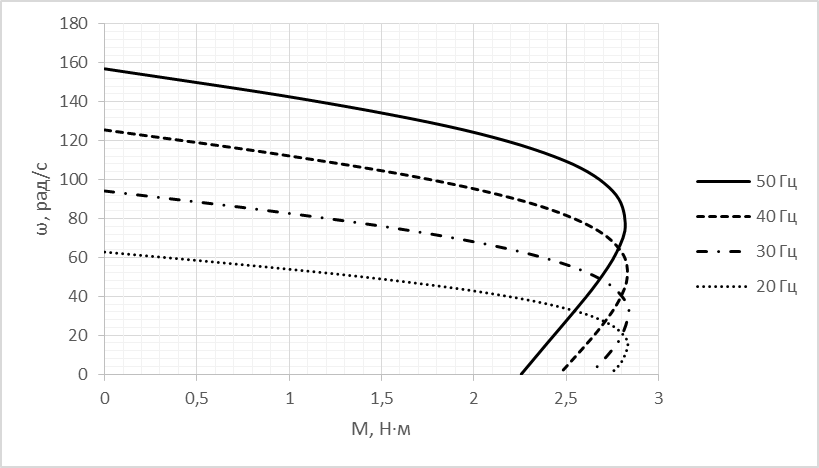
Рисунок 2.4 – Механические характеристики ПЧ-АД при постоянстве перегрузочной способности
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 437; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.254.202 (0.012 с.) |

 к номинальному
к номинальному  .
.
 , которая определяется как отношение частоты статора
, которая определяется как отношение частоты статора  к ее номинальной частоте
к ее номинальной частоте  :
:
 , который определяется как отношение абсолютного скольжения
, который определяется как отношение абсолютного скольжения  к синхронной скорости при номинальной частоте
к синхронной скорости при номинальной частоте  :
:
 и определяется следующей формулой:
и определяется следующей формулой:

 или
или  при снижении частоты уменьшается максимальный момент двигателя, поэтому уменьшается жесткость механических характеристик, увеличиваются потери в двигателе, следовательно, надежность падает из-за уменьшения перегрузочной способности, при более низких частотах двигатель может и вовсе не запуститься.
при снижении частоты уменьшается максимальный момент двигателя, поэтому уменьшается жесткость механических характеристик, увеличиваются потери в двигателе, следовательно, надежность падает из-за уменьшения перегрузочной способности, при более низких частотах двигатель может и вовсе не запуститься.
 не зависит от
не зависит от 
 , то можно получить закон, по которому будет регулироваться напряжение:
, то можно получить закон, по которому будет регулироваться напряжение:







 и
и  – коэффициенты рассеяния для статора и ротора;
– коэффициенты рассеяния для статора и ротора; – общий коэффициент рассеяния.
– общий коэффициент рассеяния. . Найдем относительную частоту статора
. Найдем относительную частоту статора 









 .
.
 – коэффициент, который зависит от параметров двигателя и частоты;
– коэффициент, который зависит от параметров двигателя и частоты; – критическое скольжение.
– критическое скольжение.
 , при котором поток двигателя будет изменяться от частоты и скольжения по определенной зависимости.
, при котором поток двигателя будет изменяться от частоты и скольжения по определенной зависимости.



 .
.
 50 Гц
50 Гц


 2,819
2,819
 2,256
2,256











 40 Гц
40 Гц
 2,83
2,83
 .
.









 30 Гц
30 Гц
 2,838
2,838
 .
.









 20 Гц
20 Гц


