Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устройство лабораторного мостового крана.Содержание книги
Поиск на нашем сайте
1.2.1 Функциональная схема мостового крана На рисунке 1.1 запечатлена функциональная схема. На ней отображено строение лабораторного мостового крана Для управления мостовым краном с обеспечением выхода в заданую точку должны быть решена следующая задача. Задача синхронизации электродвигателей моста на основе схемы электрического вала, с целью ознакомления студента с простейшими методами электрической синхронизации двух двигателей моста и на более современом методе на безе преобразователей частоты. Расмотрим работу мостового крана по функциональной схеме. Предположим, что подъемный механизм крана находится в какой либо из точек пространства лаборатории, определяемый датчиком положения, находящимся на элементах конструкции. Сигнал датчиков поступают на входы микроконтролера, в котором реализуется программа, обеспечивающая пуск электропривода, контроль и сигнализацию о положении элеметов механизмов мостового крана. На панели оператора или компьютера дается информация о нахождении подъемного механизма. Задание новой координаты производится в панели оператора. При нажатии кнопки пуск механизм подъема выходи в заданую точку. Так же после реализации стенда будет доступна возможность перепрограмировать контролер управления. В процессе работы на стенде студент должен иметь возможность ознакомиться с принципами управления электроприводов мостового крана и электрическими схемами. А так же получить навык програмирования в заданой промной среде.
1 – левая опорная балка; 2 – правая опорная балка; 3 – опорная балка тележки; 4,5 – механизмы передвижения моста; 6 – механизм передвижения тележки; 7,8,9,10 – электродвигатели механизмов передвижения; 11 – механизм подъема; 12 – концевые выключатели
Рисунок 1.1 – Функциональная схема мостового крана
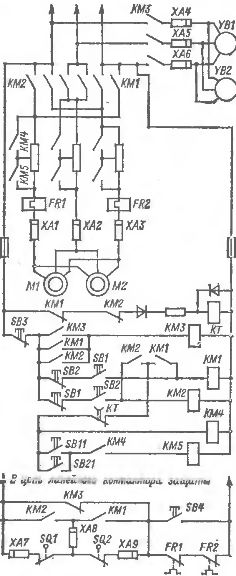
1.2.2 Электрические схемы управления электроприводами тележки и подъема На рисунке 1.2 представлена схема электропривода передвижения при управлении короткозамкнутым односкоростным двигателем.
M1, М2— электродвигатели, YB1, YB2 — электромагниты тормозов или электрогидравлические толкатели, М1, КМ2 — контакторы направления движения, КМ4, КМ5 — контакторы резисторов в цепи статоров, КМЗ — контактор тормозов, КТ — реле контроля времени пуска, FR1, FR2— тепловые реле, SQ1, SQ2 — конечные выключатели, SB1, SB2 — кнопки направления движения (двухходовые), SB11, SB21 — кнопки пуска, SB3 — кнопка прекращения свободного выбега, SB4 — кнопка шунтирования тепловой защиты, ХА1—ХА9 — контакты токопереходных троллеев
Рисунок 1.2 – Схема электропривода (с односкоростным короткозамкнутым двигателем) механизма передвижения крана при управлении с пола
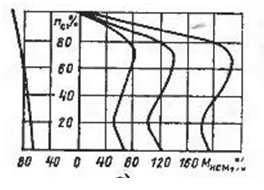
Эта схема предназначается для приводов тележек кранов грузоподъемностью 3—20 т и приводов мостов кранов грузоподъемностью 2—5 т. Обмотки статора короткозамкнутого двигателя получают питание от сети через две ступени резисторов. Механические характеристики электропривода приведены на рисунке 1.3. Управление электроприводом — от подвесных кнопочных постов. В управлении участвуют две основные двухходовые кнопки SB1 и SB2 дающие команду на движение в двух направлениях. Переход на положение без регулирующих резисторов осуществляется при подаче команд кнопками SB11, SB21. При включении двигателя через контакты контакторов КМ1, КМ2 подается питание на привод тормоза YB через контакты КМЗ. После отключения электродвигателя привод тормоза продолжает получать питание, и механизм имеет свободный выбег. Для отключения тормоза используется кнопка SB3, общая для механизма тележки и моста. При срабатывании конечных выключателей SQ1 и SQ2 происходит отключение линейного контактора защиты и накладывается механический тормоз. Для обеспечения электрического торможения противовключением после свободного выбега, используется реле времени КТ с выдержкой времени 2—3 с, задерживающее привод на положении с минимальным пусковым (тормозным) моментом. На рисунке 1.5 представлена схема электропривода передвижения мостового крана (тележки) с использованием двухскоростных короткозамкнутых электродвигателей. Электродвигатель имеет две отдельные обмотки с соотношением числа полюсов: - 2p=6/16; - 2p=4/16; - 2p=4/12. Кнопкой SB1 или SB2 включаются контакторы направления KM1, КМ2, а также контактор малой скорости КМ4. После подачи питания к тихоходной обмотке двигателя через контактор КМЗ получает питание привод тормоза YB1, YB2. Для перехода на большую скорость двухходовыми кнопками SB замыкаются контакты SB11, SB21 (второе положение) и включается контактор КМ6.
Обмотка большой скорости подключается к сети через резистор одновременно с тихоходной обмоткой. Затем тихоходная обмотка отключается. По истечении выдержки времени реле КТ (2—5 с) включается контактор КМ5 и двигатель выходит на свою естественную характеристику быстроходного режима (рисунок 1.4).
Рисунок 1.3 – Механическая характеристика к схеме электропривода (с односкоростным короткозамкнутым двигателем) механизма передвижения крана при управлении с пола
Рисунок 1.4 – Механическая характеристика к схеме электропривода (с двухскоростным короткозамкнутым двигателем) механизма передвижения крана при управлении с пола
При отключении двигателя от сети привод тормоза продолжает получать питание и имеет место свободный выбег. Электрическое торможение может быть осуществлено при переходе с большой скорости на малую. Для отключения тормоза достаточно нажать кнопку SB3. При срабатывании конечной защиты за счет размыкания линейного контактора защитной панели происходит отключение электродвигателя и наложение механического тормоза. Механизм тормозится с максимальной интенсивностью. Благодаря применению резисторов в цепи быстроходной обмотки осуществляется сравнительно плавный пуск под контролем реле времени КТ, однако тормозной момент тихоходной обмотки не ограничивается, и в этом случае плавность торможения может быть достигнута несколькими импульсными включениями кнопки SB1 или SB2.
M1. М2 — электродвигатели, YB1, YВ2 — приводы тормозов, KM1, KM 12 — контакторы направления движения, КМЗ — контактор тормозов, КМ4 — контактор малой скорости, КМ5 — контактор большой скорости, КМ6 — контактор резисторов в цепи статора, FRI, FR2, FR3 — тепловые реле, КТ — реле времени контроля пуска, SQ1, SQ2 - конечные выключатели, SB1, SB2 — кнопки направления движения (двухходовые): SB11, SB21 — кнопки большой скорости (второе положение кнопок SB1, SB2), SВЗ — кнопка прекращения свободного выбега, SB4 — кнопка шунтировании тепловой защиты, ХА1-ХЛ11 — контакты токопереходных троллеев Рисунок 1.5 – Схема электропривода (с двухскоростным короткозамкнутым двигателем) механизма передвижения крана при управлении с пола
На рисунке 1.6 представлена схема механизма передвижения мостового крана с использованием двухскоростного двигателя без свободного выбега. Схема отличается от рассмотренной последовательным включением тихоходной и быстроходной обмоток и некоторым ограничением тормозного момента при последовательном включении обмоток. Схема рекомендуется для мостовых кранов, эксплуатирующихся на открытом воздухе.
М — электродвигатель, YB— привод тормоза, KM1, КМ2 — контакторы направления движения, КМЗ— контактор малой скорости, КМ4—контактор большой скорости, КМ5 — контактор резистора большой скорости, КТ — реле контроля времени пуска, FR4 — тепловые реле, SQ1, SQ2—конечные выключатели, SB1, SB2 — кнопки направления движения, SB11, SB21 — кнопки большой скорости, SB3 — кнопка шунтирования тепловых реле, ХА1-ХА10— контакты токопереходных троллеев
Рисунок 1.6 – Схема электропривода (с двухскоростным короткозамкнутым двигателем) механизма передвижения крана
При нажатии кнопки SB11(SB21).получает питание катушка контактора КМ4, происходит переключение с малой скорости на большую при минимальном перерыве питания. При этом не может быть положения, когда быстроходная и тихоходная обмотки отключены. Переход с тихоходной обмотки на быстроходную происходит под контролем реле времени КТ. При срабатывании конечной защиты происходит двойное отключение обмоток
двигателя и тормоза.
М — электродвигатель, YB — обмотка тормоза, KM1 — лилейный контактор, КМ2— КМЗ—контакторы направления движения, КМ4 — контактор переключения скоростей, FR1—FR3 — тепловые реле, КТ — реле контроля разгона, SQ1, SQ2— конечные выключатели, SB1, SB2 — кнопки направления (двухходовые). SB3 — кнопка шунтирования тепловых реле, SB11, SB21 — кнопки большой скорости (второе положение кнопок SB1, SB2), ХА1 - ХА10 — контакты токопереходных троллеев.
Рисунок 1.7 – Схема электропривода (с двухскоростным короткозамкнутым двигателем) механизма подъема при управлении с пола
На рисунке 1.7 представлена схема управления электроприводом подъема с использованием двухскоростного короткозамкнутого электродвигателя с двумя независимыми обмотками с соотношением чисел полюсов 4/24 и 6/16. Схема построена по принципу двойного разрыва двумя независимыми аппаратами главной цепи обмоток электродвигателя и цепей привода тормоза, что обеспечивает необходимую надежность привода подъема. Тихоходная обмотка электродвигателя получает питание через контакты линейного контактора КМ1, контакты контакторов направления КМ2, КМЗ и размыкающие контакты контактора КМ4 после нажатия соответствующей кнопки SB1, SB2 (первое положение). На рисунке 1.8 представлена схема электропривода механизма подъема с двумя короткозамкнутыми электродвигателями, соединенными между собой и с редуктором через планетарную передачу с передаточным числом 6—8. Электродвигатель малой скорости М2 включается на все время работы механизма. Электродвигатель большой скорости включается на время работы большой скорости. Электродвигатель малой скорости имеет встроенный тормоз.
M1 — электродвигатель большой скорости, М2 — электродвигатель малой скорости, YB1 — обмотка тормоза большой скорости, YB2 — обмотка тормоза двигателя малой скорости, KM1 — линейный контактор, КМ2—КМЗ — контакторы направления большой скорости, КМ4, КМ5 — контакторы направления малой скорости, КМ6—контактор тормоза большой скорости, КТ — реле контроля времени пуска, SQ1, SQ2 — конечные выключатели, FR1—FR4 — тепловые реле, SB1, SB2-двухходовые кнопки направления, SB11, SB21 — кнопки большой скорости (второе положение кнопок SB1, SB2), XA1— ХА10 — контакты токопереходных троллеев.
Рисунок 1.8 – Схема электропривода механизма подъема при управлении с пола
Электродвигатель большой скорости имеет отдельный тормоз с приводом от электрогидравлического толкателя. При нажатии кнопки направления SB1(SB2) получает питание катушка контактора КМ4 (КМ5) и включается электродвигатель малой скорости. Одновременно включается общий линейный контактор КМ1. При нажатии кнопки SB1(SB2) до упора замыкаются контакты SB11(SB21), получают питание катушки контактора КМ2(КМЗ) и КМ6, но после того как истечет время пуска на малой скорости под контролем реле КТ, включается двигатель большой скорости. При замедлении подъема или спуска после отключения двигателя большой скорости затормаживание до малой скорости осуществляется тормозом YB1. После срабатывания конечных выключателей SQ1 и SQ2 происходит отключение электропривода с двойным разрывом цепи двигателя и приводов тормозов. Все описанные схемы в соответствии обеспечивают включение механизмов крана при управлении с пола только при постоянном нажатии на кнопку. При отключении любого вида защиты механизм останавливается вне зависимости от состояния кнопочного аппарата управления. Рассмотренные схемы рисунков 1.4, 1.5, 1.7 могут быть скомпонованы из стандартных магнитных пускателей типа ПМА, ПМЛ и реле времени. Исключение составляет схема изображенная на рисунке 1.2, в которой в качестве контактора переключения скоростей используется контактор постоянного тока МК1-22, 40 А, 380 В, катушка 220 В. По указанным схемам разрабатываются панели управления для двигателей передвижения мощностью от 0,8 до 2х8,5 кВт и панели управления для двигателей подъема мощностью от 10 до 22 кВт.
|
||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 444; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.119.34 (0.008 с.) |