
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Многозвенные зубчатые передачи с неподвижными осями вращения колёсПростейшая или одноступенчатая зубчатая передача состоит из двух колёс, находящихся в зацеплении друг с другом. Зацепление может быть внешним или внутренним, в связи с чем передачи делятся на передачи внешнего и внутреннего зацепления. На рис.5.12 показаны схемы одноступенчатой передачи внешнего (см. рис. 5.12,а) и внутреннего (см. рис. 5.12, б) зацепления.
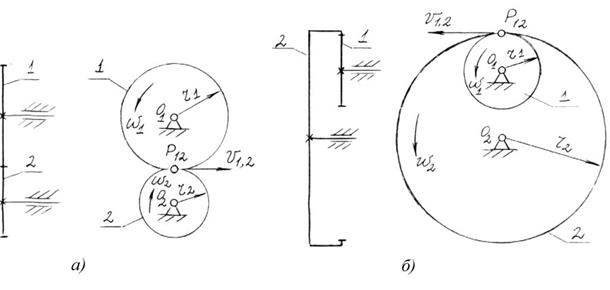
Так как, согласно основной теореме зацепления, скорости колес в полюсе зацепления (т.Р) одинаковы, т.е. V1 = V2 = w1r1 = w2r2, то передаточное отношение одноступенчатой передачи можно выразить через радиусы колес или через числа зубьев (учитывая, что r =mz/2): U12 = w1 /w2 = rw2/ r w1 = r2/ r1 = z2/z1, где rw1, rw2, r1, r2, z1, z2 – соответственно радиусы начальных и делительных окружностей и числа зубьёв первого и второго колёс. При выражении передаточного отношения через радиусы или числа зубьев колёс, для учёта направления вращения колёс, передаточному отношению присваивается знак «минус» (колёса вращаются в разные стороны), если это передача внешнего зацепления, и знак «плюс» для передачи внутреннего зацепления (колёса вращаются в одном направлении). Для рис. 5.12,а: U12 = w1 /w2 = - r2/ r1 = - z2/z1. Для рис. 5.12,б: U12 = w1 /w2 = r2/ r1 = z2/z1. Одноступенчатые передачи, как правило, применяются при передаточных отношениях до пяти-шести. Для получения больших передаточных отношений и для уменьшения габаритов применяются многоступенчатые передачи, составленные из нескольких последовательно соединённых между собой одноступенчатых зубчатых передач, как это представлено, например, на рис.5.13. При этом колёса 1 и 2 образуют первую ступень, колёса 3 и 4 – вторую ступень, колёса 5 и 6 – третью ступень.
Определим передаточное отношение каждой ступени в отдельности: UI = U12 = w1 /w2 = - r2/ r1 UII = U34 = w3 /w4 = - r4/ r3 UIII = U56 = w5 /w6 = r6/ r5, где UI, UII,UIII - передаточное отношение соответственно первой, второй, третьей ступени. Перемножим полученные передаточные отношения с учётом того, что w2 = w3 и w4 = w5: UIUIIUIII =U12U34U 56 = Индекс “ вщ ” относится к ведущему колесу, индекс “ вм ” - к ведомому. В общем случае Uвщ. вм. = w вщ / w вм = (-1) к где к – число внешних зацеплений. Для зубчатой передачи, изображенной на рис.5.14, передаточное отношение определится как: U13= w1 / w3 = (-1)2
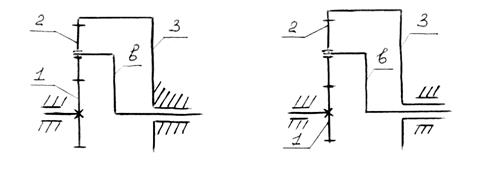
Колесо 2 является одновременно ведущим (в паре колес 2-3) и ведомым (в паре 1-2) и называется паразитным. Паразитное колесо не влияет на величину передаточного отношения, а влияет только на его знак. 5.5 Зубчатые передачи с подвижными осями вращения колёс (планетарные зубчатые механизмы) Структура планетарных зубчатых механизмов Как уже отмечалось, планетарными зубчатыми механизмами называют механизмы, в которых имеются зубчатые колёса, перемещающиеся в пространстве. Колёсо 2 (рис.5.15), перемещающееся в пространстве, называется сателлитом. Звено “ в ”, которое перемещает ось сателлита, называется водилом. Звенья 1, в,3, оси вращения которых совпадают с общей центральной осью механизма, называются центральными. Планетарные механизмы подразделяются на простые планетарные, дифференциальные и сложные планетарные. К простым планетарным механизмам относятся четырёхзвенные механизмы, у которых одно из центральных колёсо закреплено (рис.5.15,а), т.е. является неподвижным. Такое колесо носит название опорного (или солнечного).
а) б) Рис. 5.15. Зубчатые передачи с подвижными в пространстве колесами: а) простой планетарный механизм, б) дифференциал.
Простой планетарный механизм имеет одну степень свободы, передаточное отношение в этом механизме имеет вполне определённое значение. К дифференциальным (или просто – к дифференциалам) относятся механизмы (рис. 5.15, б) у которых нет неподвижных колес (оба центральных колеса вращаются). Дифференциал имеет две степени свободы, т.е. при заданном повороте одного его центрального звена повороты двух других не являются определёнными. Сложные планетарные механизмы состоят из простого планетарного механизма (или дифференциала) и присоединённой к нему дополнительной зубчатой передачей, выполненной в виде простого планетарного механизма или в виде передачи с неподвижными осями зубчатых колес. 5.5.1 Определение передаточного отношения планетарных механизмов Так как в планетарных и дифференциальных механизмах имеются колёса, которые совершают сложное движение – сателлиты, а также водило, не являющееся зубчатым колесом, то расчёт передаточного отношения этих механизмов требует специальных методов. Аналитический метод (метод Виллиса) Аналитический метод основан на преобразовании планетарного механизма в зубчатую передачу с неподвижными осями вращения колёс с последующим определением передаточного отношения по формуле (5.1). Метод Виллиса состоит в следующем: мысленно всем звеньям механизма сообщается дополнительное движение, обратное движению водила. В результате сложения действительного и дополнительного движений водило останавливается и механизм преобразуется в зубчатую передачу с неподвижными осями вращения колес, после чего определяется передаточное отношение между центральными звеньями, которое выражается через радиусы или числа зубьев колёс. Полученный механизм называется приведенным или обращенным. Если заданный механизм является простым планетарным, то полученное уравнение оказывается достаточным для непосредственного определения из него передаточного отношения заданного механизма. Если механизм является сложным планетарным, его разделяют на составляющие механизмы. Далее, применяя метод обращения движения (метод Виллиса) к тем механизмам, которые являются планетарными, определяют передаточные отношения между центральными звеньями приведенных механизмов, связывая тем самым их угловые скорости (в обращенном движении). Решая затем полученную систему из двух уравнений, находят искомое передаточное отношение исходного механизма. Если один из составляющих механизмов не является планетарным, то к нему метод Виллиса не применяется, (передаточное отношение определяется непосредственно через числа зубьев или радиусы колес). Пример. На рис.5.16 изображен простой планетарный механизм, состоящий из центрального колеса 1, сателлитов 2 и 3, опорного колеса 4 и водила “ в ”. Требуется определить передаточное отношение UI в от колеса 1 к водилу “ в ”, считая радиусы колёс известными.
Рис. 5.16. Простой планетарный механизм с блоком сателлитов 2-3 (с двумя внешними зацеплениями)
В действительном движении центральные звенья механизма имеют угловые скорости w1, w в, w4=0. Сообщим мысленно всему механизму дополнительное движение, обратное движению водила (-w в). В результате сложения действительного и дополнительного движений водило останавливается, а другие звенья будут двигаться с угловыми скоростями: w1 в = w1 - w в w4 в = - w в w в =0. Знак “ в ” в обозначениях угловых скоростей показывает, что соответствующие скорости являются скоростями звеньев в приведённом механизме, у которого остановлено водило. Удобно вышеописанные преобразования угловых скоростей свести в таблицу:
Механизм из планетарного преобразовался в обычную двухступенчатую зубчатую передачу, для которой по формуле (5.1) можно определить передаточное отношение между центральными звеньями, скорости которых не равны нулю: U в 14 = w в 1/ w4 в = (w1-w в)/-w в = U в 12 U в 34 = (-z2/z1) (-z4/z3). Отсюда - w1/ w в +1= (z2z4/ z1z3). В результате U41 в =w1/ w в = 1 - (z2z4/ z1z3) = 1-U в 14 , (5.2) где U в 14= z2z4/ z1z3. Т.е. передаточное отношение от колеса к водилу равно единице минус передаточное отношение от того же колеса к другому центральному, но в приведённом механизме, полученном из этого же планетарного механизма методом остановки водила. Для механизма, представленного на рис. 5.15,а: U31 в =1-U в 13 U в 13=U в 12U в 23= U31 в =1+ Для механизма, изображенного на рис.5.17: U41 в =1-U в 14 U в 14=U в 12U в 34= U в 14=1+
Рис.5.17. Простой планетарный механизм с блоком сателлитов 2-3 (с одним внешним и одним внутренним зацеплением) Графический метод Основан на использовании картины (плана) скоростей механизма. Геометрическое место концов векторов скоростей точек вращающегося звена (рис.5.18), представляет собой прямую, соединяющую конец вектора
Рис.5.18. К определению передаточного отношения зубчатых механизмов графическим методом.
скорости точки А и начало координат. Эту прямую называют линией распределения скоростей точек звена. Выразим угловую скорость звена через скорость точки А: w1 = VA / rОА = Здесь mV[м /с мм] и m l [м/мм] - соответственно масштабные коэффициенты по осям абсцисс (скоростей) и ординат (радиусов). Для двух звеньев А и В передаточное отношение в соответствии с последней формулой (с учетом того, что для обоих звеньев построения выполняются в одинаковых масштабах, вследствии чего они сокращаются) будет равно отношению тангенсов углов наклона линий распределения скоростей ведущего «А» и ведомого «В» звеньев: UАВ = wA/wB = tg dA / tg dВ При этом, если углы расположены в одной четверти, то передаточному отношению присваивается знак «+», если в разных - знак «-». Вместо отношения тангенсов можно, как это будет показано далее, использовать отношение соответствующих отрезков, отсекаемых на линиях распределения скоростей входного и выходного звеньев. Последовательность определения передаточного отношения графическим методом следующая: 1. Размещаем начало прямоугольной системы координат V и r на центральной оси механизма. 2. Задаёмся окружной скоростью какой-либо точки (обычно это полюс зацепления или ось колеса) одного из центральных звеньев, изображая эту скорость в выбранной системе координат отрезком произвольной длины, параллельным оси V в произвольном направлении, на соответствующем расстоянии от оси абцисс. Удобно задаваться скоростью звена, через одно связанного с неподвижным звеном. 3. Соединяем конец выбранного вектора с началом координат, где все центральные звенья имеют скорость, равную нулю, т.е. проводим линию распределения скоростей точек этого звена. 4. Используя точки (полюса зацеплений), в которых скорости сопряжённых звеньев равны между собой, последовательно строим линии распределения скоростей для всех остальных звеньев механизма. 5. Из построенной таким образом картины скоростей находятся углы наклона линий распределения скоростей входного и выходного звеньев, после чего определяется передаточное отношение заданного механизма. Отношение тангенсов удобнее заменить отношением соответствующих отрезков. Для этого на произвольном расстоянии от оси абцисс проводят вспомогательную прямую и продолжают линии распределения скоростей входного и выходного звеньев до пересечения с этой прямой. Затем измеряются длины отрезков, заключенные между осью ординат и точками пересечения линий распределения скоростей звеньев со вспомогательной прямой, после чего рассчитывается передаточное отношение, как отношение измеренных отрезков. Пример. Для простого планетарного механизма, изображённого на рисунке 5.19,а, определить передаточное отношение U1 в графическим способом. Задаемся скоростью точки водила «в», которая совпадает с подвижной осью блока сателлитов 2-3. Эту скорость изображаем вектором произвольной длины V в, расположенным параллельно оси абцисс на уровне выбранной точки. Соединив конец вектора скорости водила V в с началом координат –точкой О, получим линию распределения скоростей водила “ в ”. Для блока сателлитов 2-3 скорость его оси известна – она совпадает со скоростью V в конца водила. Другой точкой этого блока, скорость которой предопределена, является полюс зацепления Р34 колеса 3 и опорного колеса 4.
Звено 4 неподвижно, скорость его любой точки (в том числе и точки Р34 – полюса зацепления колес 3 и 4) равна нулю. Но так как скорости колес в полюсе зацепления одинаковы, то скорость колеса 3 в этой же точке Р34 также равна нулю. Таким образом, для блока сателлитов 2-3 известны скорости двух его точек – скорость оси V в ,2,3 и нулевая скорость в т. Р34. Соединив прямой линией конец вектора V в ,2,3 с точкой Р34 на плане скоростей, получим линию распределения скоростей блока сателлитов 2-3. Рассмотрим теперь пару колес 1-2. В полюсе зацепления Р12 окружные скорости колёс равны между собой. Скорость колеса 2 определяется с помощью построенной линии распределения скоростей блока сателлитов 2-3. Для этого на уровне точки Р12 проводим горизонталь до пересечения с линией распределения скоростей саттеллита (продолжив ее влево). Полученный вектор V12, заключённый между вертикальной осью и линией распределения скоростей 2-3, представляет собой скорость колеса 2 в полюсе зацепления с колесом 1. Так как скорости колес в полюсе зацепления колес равны, то этот вектор изображает также скорость колеса 1 в той же точке Р12. Поскольку скорость точки колеса 1, лежащей на центральной оси, равна нулю, то, соединив полученный отрезок с началом координат, получаем линию распределения скоростей колеса 1. Из построенного таким образом плана скоростей механизма определяются углы d1 и d в наклона линий распределения скоростей входного и выходного звеньев, а затем – передаточное отношение механизма: U1 в = w1/w в = - tg d1/tgd в. (5.3) Знак «минус» поставлен ввиду того, что углы расположены в разных четвертях. Заменим отношение тангенсов углов отношением соответствующих отрезков. Для этого проведем на плане скоростей в произвольном месте горизонталь «х-х» (рис.5.19,б). Обозначим точки пересечения этой горизонтали с осью радиусов и линиями распределения скоростей входного и выходного ззвеньев соответственно А,В,С. Тогда из треугольников АОС и АОВ будем иметь: tgd1 = АС / АО и tgd в = АВ / АО. После подстановки этих равенств в формулу (5.3) получим: U1 в = w1/w в = - tg d1/tgd в = -АС /АВ. Выразим искомое передаточное отношение через радиусы колёс: U1 в = w1/w в = - tg d1/tgd в = -(аа¢/оа)/(вв¢/ов) = -(аа ¢(r1 +r2))/(вв ¢/(r1)). Из подобия треугольников аа¢/вв¢ = о¢а/о¢в = (r2 – r3)/r3. Тогда U1 в = где r1 + r2 - r3 = r4. Аналитический метод (метод Виллиса) приводит к такому же результату (см. формулу 5.2): U1 в 4 = 1 - U14 в = 1 – (r2r4)/ (r1r3).
|
|||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 1206; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.134.78.106 (0.005 с.) |


 .
. , (5.1)
, (5.1) .
.

 Звенья
Тип движения
Звенья
Тип движения

 U3 в 1=
U3 в 1=  .
.
 .
.

 = tg d (m v / m l).
= tg d (m v / m l).
 ,
,


