Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Управление скоростью вращения электроприводовСодержание книги
Поиск на нашем сайте
В механизмах подачи электродной проволоки в сварочных полуавтоматах и автоматах и механизмах перемещений автоматов преимущественно применяются электродвигатели постоянного тока. Напряжение Uя, приложенное к якорю двигателя уравновешивается падением напряжения на обмотке якоря и ЭДС, наводимой в этой обмотке при вращении якоря Uя = Iя Rя + E, Е = СеФn откуда n = Uя /(Cе Ф) - IяRя/(Се Ф), где UЯ – напряжение на якоре двигателя, В; IЯ – ток якоря, А; RЯ – сопротивление обмотки якоря, Ом; E – ЭДС в обмотке якоря, В; Cе – постоянная двигателя; F -- величина магнитного потока, создаваемого обмоткой возбуждения; n – число оборотов двигателя. Выражение показывает, что управлять скоростью двигателя можно тремя способами: изменением подводимого напряжения Uя, потока Ф, сопротивлением цепи якоря Rя. Включение дополнительного сопротивления в цепь якоря приводит к получению падающей механической характеристики привода (с ростом нагрузки на валу скорость вращения двигателя падает), что неприемлемо в сварочных установках. Управление скоростью изменением величины магнитного потока также в сварочных установках практически не применяется т. к. в этом случае скорость регулируется от номинальной и выше. В автоматах и п/автоматах электроприводы по своему назначению делятся на два типа (рис. 2.15 и 2.16): для управления скоростями подачи электродной проволоки и перемещения сварочной каретки и их стабилизации; для управления напряжением дуги и его стабилизацией — зависимая подача.
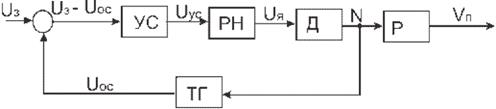
Рис. 2.15. Функциональная схема управления приводом независимой подачи электродной проволоки, УС – усилитель разности сигналов задания UЗ и обратной связи UОС; РН – регулятор напряжения для регулирования напряжения на якоре двигателя UЯ; электродвигатель подачи электродной проволоки; n – число оборотов двигателя; Р – редуктор; VП – скорость подачи электродной проволоки.
Рис. 2.16. Функциональная схема управления приводом зависимой подачи для регулирования и стабилизации напряжения на дуге. Здесь ИП – источник питания; ДН – датчик напряжения на дуге.
Из приведенных функциональных схем видно, что необходимый закон регулирования напряжения на якоре двигателя обеспечивается сигналом обратной связи ОС, снимаемой с входных зажимов якоря (в схеме с независимой подачей) и с дугового промежутка (в схеме с зависимой подачей). Этот сигнал сравнивается с сигналом задания в устройстве сравнения, а полученная разность через усилитель УС управляет регулятором напряжения РН на якоре двигателя Д.
Устройство сравнения в практических схемах представляет собой схему вычитания двух напряжений и часто реализуется на 3 резисторах. После сравнения сигналов задания обратной связи требуется усиление разницы сигналов с большим коэффициентом усиления. На практике для этой цели применяются усилители постоянного тока. В более ранних разработках они реализовывались на транзисторах, а в последние годы используются интегральные усилители постоянного тока. Эти усилители, называемые операционными, практически не имеют недостатков, присущих усилителям на дискретных компонентах. Обладая высоким коэффициентом усиления, большим входным сопротивлением и имея два входа (прямой и инвертирующий), они объединяют в себе функции сравнения и усиления сигналов, а также функции коррекции управляющих воздействий. Последнее позволяет простыми средствами формировать требуемые законы регулирования, обеспечивая тем самым необходимые статические и динамические свойства электроприводов. В качестве регуляторов напряжения используются система генератор – двигатель, тиристорные преобразователи, а также широтно-импульсные преобразователи на транзисторах.
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-15; просмотров: 466; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.137.150 (0.009 с.) |