Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механические воздействия и защита эвс.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И ЗАЩИТА ЭВС. ВНЕШНИЕ ВОЗДЕЙСТВУЮЩИЕ ФАКТОРЫ. КЛАССИФИКАЦИЯ. Классификация внешних воздействий:
* Не кинематические ВВФ, а климатические ВВФ. 1. Механические и внешние воздействующие факторы: a. Колебания. b. Удар – кратковременное воздействие внешней силы. c. Ускорение. d. Механическое давление. e. Сила. f. Момент и распределенный момент. g. Поток жидкости. 2. Климатические ВВФ. a. Атмосферное давление: b. Температура среды: c. Атмосферные осадки. d. Туман (образуется конденсат). e. Пыль. f. Песок (например, песчаная буря, песок во время песчаной бури пробирается куда только можно). g. Солнечное излучение (обладает тепловым воздействием, ультрафиолет, наличие фотоэффекта). h. Поток воздуха. i. Среда с высокими коррозионно-активными агентами. j. Ледово-грунтовая среда. 3. Радиационные ВВФ (ионизирующие воздействующие излучения). a. b. c. Рентгеновское излучение. d. Протонное излучение. e. Нейтронное излучение. f. Электронное излучение g. Излучение многозаряженных частиц. 4. Электромагнитные ВВФ. a. Электрический ток. b. Электрическое поле. c. Лазерное излучение. d. Электромагнитный импульс ядерного взрыва (следствие – электромагнитный импульс). 5. Биологические ВВФ. a. Воздействие живых существ. b. Кислотно-щелочная и нейтральная среда. c. Масла и смазки, топливо, специальные среды. Термические ВВФ. a. Световое излучение ядерного взрыва. b. Термический удар. c. Аэродинамический нагрев. d. Нагрев трением. e. Нагрев тепловым потоком. f. Пламя.
ВНЕШНИЕ ВОЗДЕЙСТВУЮЩИЕ ФАКТОРЫ КОСМИЧЕСКОЙ СРЕДЫ. Космические воздействия при эксплуатации ЭС характеризуются совокупностью следующих факторов: электромагнитных и корпускулярных излучений, глубокого вакуума, лучистых тепловых потоков, невесомости, метеорных частиц, магнитных и гравитационных полей планет и звезд и др.
Километровые волны – распределяются по поверхности Земли. Длинные волны – распределяются от источника на определенном расстоянии. Средние волны – лучше ловят ночью, из-за высокой ионосферы (днем солнечные лучи давят на ионосферу и опускают ее к Земле). Короткие волны – многократно отражаются от ионосферы и многократно огибают Землю.
Ультракороткие волны – для них ионосфера прозрачна, т.е. они проходят сквозь нее. Есть области, где ионосфера не пропускает УКВ. Радиационные пояса:
Как защитить от электронизации? Покрыть специальным покрытием на основе солей свинца.
МЕХАНИКА
Конструктивные особенности системы виброизоляции
Конструктивные особенности системы амортизации. Основной особенностью, определяющей вид неравенства Релея, является наличие плоскости в системе. Плоскость симметрии – это плоскость, относительно которой симметричны: - массы частей блока; - координаты установки амортизаторов. Различаются следующие системы амортизации: 1. Система с 3-мя плоскостями симметрии. 2. Система с 2-мя плоскостями симметрии. 3. Система с 1-ой плоскостью симметрии. 4. Система без плоскостей симметрии. Различные системы имеют различный вид неравенства Релея и различную точность в определении частот.
Система с одной плоскость симметрии.
Правило составления связок 1. Выделяется ось, перпендикулярная плоскости симметрии. 2. Поступательное движение вдоль выделенной оси связывается с поворотными движениями вокруг осей, лежащих в плоскости симметрии. [V-Z-X]. 3. Поворотное движение вокруг выделенной оси связывается с поступательным движением вдоль осей, лежащих в плоскости симметрии. [Y-W-U]. 4. Для каждой связки записывается неравенство Релея т определяется диапазон собственных частот. Полный диапазон собственных частот системы формируется из 2-х полученных диапазонов.
Пассивная виброизоляция. Пассивная виброизоляция – изоляция аппаратуры от вибрирующего основания.
Часто по определенным амплитудам блока рассчитывают ускорения элементов конструкций. Рассчитанное ускорение сравнивается с допустимым. Если оно меньше или равно допустимому, то система спроектирована верно, если больше, то необходимо внести коррективы в систему амортизации. Постановка задачи такова: спроектировать систему амортизации, при Упрощённая методика. Здесь удар трактуется мгновенным. При этом принимают потенциальную энергию, определяемую деформацией
m – известна; При заданной форме ударного импульса
Для типовых форм ударных импульсов формул для расчета
Методика определения ускорения объекта сводится к следующим действиям: 1. По ударной характеристике энергоёмкости системы (определяем максимальную деформацию амортизаторов: 2. По максимальной деформации, с помощью силовой ударной характеристики, определяем максимальную ударную силу: 3. По максимальной ударной силе определяем ускорение объекта по формуле:
Этот алгоритм действителен и для метода эквивалентных прямоугольных импульсов.
Оценим погрешность этого расчёта: знаменатель известен, числитель определяется то графику энергоемкости, т.к. значение
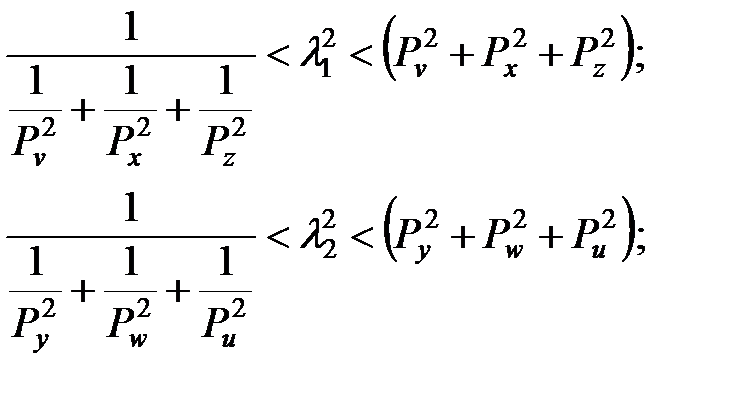
Неравенство Релея Неравенство Релея:
под знаком суммы могут присутствовать только разные парциальные частоты.
Неравенство Релея позволяет определить диапазон собственных частот системы без точного определения конкретных частот, причем чем больше N, тем меньше точность в определении частот.
Расширение диапазона собственных частот при расчете по неравенству Релея обеспечивает дополнительный запас по значению коэффициента динамичности.
Статический расчет системы. 1.1 Определение координат центра тяжести объекта. 1.2 Определение реакции амортизаторов. 1.3 Выбор типа размера и варианта установки амортизатора.
Для трех амортизаторов
Если установлены разные амортизаторы, необходимо дополнительно учитывать при расчете толщины прокладки первоначальную разницу габаритных размеров и амортизаторов.
Динамический расчет Рекомендации по проектированию системы виброизоляции Выполнение указанных рекомендаций позволит спроектировать систему амортизации в одном варианте, удовлетворяющем заданным требованиям: jоб < [ jоб ], где [ jоб ] - допустимое ускорение объекта. 1. Для снижения собственных частот системы и уменьшения их диапазонов, необходимо располагать центр тяжести блока в плоскости, проходящей через точки крепления амортизаторов.
Пример:
возможен также вариант:
2. При монтаже блока на амортизаторах должно быть гарантировано равенство расчётной и реальной статической, нагрузок на каждый амортизатор.
Эта погрешность приводит к изменению P, а изменение P повлечёт за собой изменение динамической жёсткости коэффициента демпфирования и т.д. 3. При выборе координат установки амортизаторов необходимо стремиться к: выполнению следующей зависимости:
Если рассмотреть формулы для парциальных частот, то можно увидеть, что
и не зависит от координат их установки, т.е. выбрав типоразмер амортизатора, мы однозначно фиксируем 3 парциальные частоты. В то время как поворотные частоты т.е. мы можем управлять 4. При работе в резонансной зоне необходимо выбрать амортизаторы с большим коэффициентом демпфирования. При этом необходимо иметь, по возможности, максимальную связность движения объекта, что определяется отсутствием плоскостей симметрии.
5. Одновременное осуществление вибро- и ударнозащитных свойств в системе может быть достигнуто установкой со сдвоенной опорой - это 2 последовательно расположенных амортизатора. Статическая характеристика сдвоенной опоры.
Нагрузка на все амортизаторы (на 1-ый и на 2-ой) одинакова. Жёсткость суммы амортизаторов определяется формулой:
-это большое преимущество, т.к. чем меньше жёсткость, тем выше изоляционные свойства системы. Динамическая жёсткость определяется:
6. При компоновке блока следует выполнять правило: 6.1 Элемент с наибольшей плотностью следует располагать ближе к точкам установки амортизаторов. В этом случае выдерживается более лучшие соотношения между радиусом инерции блока и координатами амортизаторов. Наиболее тяжёлые элементы надо ставить над амортизаторами. 6.2 Наиболее чувствительные к вибрации элементы надо устанавливать в плоскости, проходящей через точки крепления амортизаторов. 7. Кабель, подводимый к блоку не должен изменять жесткостные и инерционные параметры системы.
Масса кабеля должна быть учтена и дополнена в массу объекта соответствующим образом.
8. Блок на амортизаторах должен быть надёжно заземлён (без изменения жесткостных параметров системы) - из энергетических соображений. Обычно это делается так:
Возмущающие силы Возмущающие силы не зависят от движения системы, но активно влияют на него. Существует 2 способа задания возмущающих воздействий: 1. P (t) – задаются возмущающие силы в функции от времени. 2. Задание зависимости амплитуды перемещения основания от времени, это кинематическое возбуждение A (t). Различают 2-е задачи виброизоляции (в соответствии с заданием сил): 1. Активная виброизоляция - соответствует 1-му способу задания сил. 2. Пассивная виброизоляция – соответствует кинематическому возбуждению.
Упрощённая методика. Здесь удар трактуется мгновенным. При этом принимают потенциальную энергию, определяемую деформацией
m – известна; При заданной форме ударного импульса
Для типовых форм ударных импульсов формул для расчета Методика определения ускорения объекта сводится к следующим действиям: 4. По ударной характеристике энергоёмкости системы (определяем максимальную деформацию амортизаторов: 5. По максимальной деформации, с помощью силовой ударной характеристики, определяем максимальную ударную силу: 6. По максимальной ударной силе определяем ускорение объекта по формуле: Этот алгоритм действителен и для метода эквивалентных прямоугольных импульсов.
знаменатель известен, числитель определяется то графику энергоемкости, т.к. значение
Амортизатор демпфированный (АД). 1 - подвижный шток, крепится к объекту; 2 - корпус амортизатора жёстко соединённый с основанием амортизатора 6 и крепится к раме; 3 - резиновый баллон с калиброванным отверстием 5; При вибрационных нагрузках баллон деформируется и через калиброванное отверстие проходит воздух внутрь и в баллон, следовательно происходит рассеивание энергии, т.о. осуществляется демпфирование. 4 - металлическая пружина - упругий элемент, определяющий статическую и динамическую жёсткость амортизатора.
Демпфированные амортизаторы типа АД применяют когда требуется установка приборов таким образом, чтобы в некотором диапазоне нагрузок соблюдалась равночастотность. Они могут работать в диапазоне температур -60°С... +70°С. Их устанавливают на приборах, работающих в широком диапазоне вибрации. Они хорошо гасят свободные колебания с ускорением до 4 g, снижают ударные ускорения примерно в 2,8 раза, а также удовлетворительно работают в условиях пониженного давления (ниже 40 мм рт. ст.) и при перепаде внешней температуры от -60°С... +70°С.
Необходимо: перечислить и недостатки этого амортизатора: 1. наличие резиновой детали - старение, боится солнечной радиации. 2. невозможность эксплуатации при большой разреженности атмосферы (непригоден для самолётов, ракет, высокогорий...).
Удар по основанию.
За время действия импульса блок успел сместиться на некоторую величину:
Т.о. в реальной ситуации деформация определяется и кинетической и потенциальной энергиями совместно.
Методика расчета.
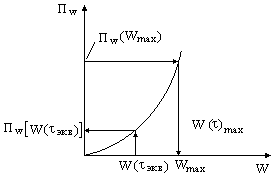
Исходным является уравнение полной энергии системы А = Т + П. Распишем его через параметры эквивалентного прямоугольного импульса:
где W - смещение в любой момент времени;
Пw(W) - потенциальная энергия амортизаторов при деформации W;
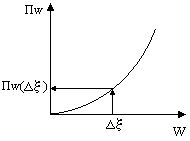
Для дальнейшего расчёта отроятся вспомогательные графики
Графики строятся в следующем виде (сначала
Построение графика: равно
Например: По границам Условие эквивалентности гарантирует точное определение параметров системы только при: Кривая 2 - точная зависимость, рассчитанная аналитически. В точке при
Далее вычисляем полную энергию системы. Предположим, что накопленные за время удара кинетическая и потенциальная энергии переходят в потенциальную энергию сжатых амортизаторов, тогда можно записать:
I - расчёт о данным; II - определяется по графику ударной энергоёмкости.
Далее определяем ускорение объекта по ранее указанной методике. Рассмотренные методики могут применяться при
Эффективность амортизации.
ТЕПЛО.Вопрос№2 ТЕПЛО.Вопрос№4 Сравнение штыревых и ребристых радиаторов. Оценка производится для одинаковых габаритов либо для одинаковых режимов транзисторов. У штыревых радиаторов выигрыш до 40% в обоих случаях, как при естественной, так и при вынужденной конвекции. 1. высота ребра не должна быть более 40мм. 2. поверхность оребрения (частота рёбер) не должна превышать более чем в 5-6 раз основание радиатора. Идеальное ребро -ребро, у которого температурный напор по всей высоте одинаков.
Практические рекомендации. Оценку эффективности ребра ведут по следующему соотношению:
При повышении числа ребер возрастает теплоотдающая поверхность радиатора, но уменьшается расстояние между ребрами, что приводит к увеличению Конструктивные рекомендации. 1. При охлаждении радиаторов за счёт естественной конвекции воздушные каналы необходимо располагать вертикально. При установке радиаторов на горизонтальное шасси снизу необходимо предусматривать отверстия для подвода воздуха, или поднимать радиатор над шасси на расстояние не менее оптимального межрёберного. 2. При обдуве воздухом каналы необходимо располагать по направлению движения воздуха.
Аналогии.
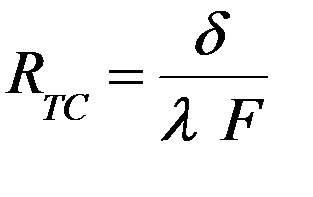
Выражение для RTC. Плоская стенка: Цилиндрическая стенка: Закон Ома в дифференциальной форме: Коэффициент теплопроводности пропорциональности удельной электрической проводимости.
t2 - точка нулевого потенциала.
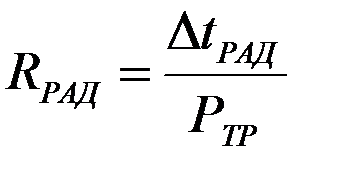
ТЕПЛО.Вопрос№6 Охлаждение транзисторов.
Необходимо по проведённому расчёту определить заготовку. Рассмотрим установившийся режим. Важнейшим условием безотказной работы полупроводниковых приборов является применение эффективного теплоотвода, гарантирующего сохранение температуры p-n переходов в допустимых пределах. Применение радиаторов даже в случае, когда мощный транзистор используется с малым коэффициентом нагрузки, увеличивает долговечность его работы.
Эквивалентная схема.
Определяем перегрев радиатора
Находим термическое сопротивление радиатора.
Определяем проводимость заготовки радиатора.
Далее пользуемся тепловыми характеристиками промышленных заготовок радиаторов.
Для обеспечения электрической изоляции от шасси необходимо ввести изоляционные прокладки, повышающие значение термического сопротивления
Передача тепла конвекцией. Она неразрывно связана о переносом среды, в которой происходит теплообмен (среда - газ либо жидкость). Перенос среды зависит от природы возникающего движения и его режима, свойств жидкости, геометрических размеров поверхности, с которой происходит теплообмен.
ТЕПЛО.Вопрос№8 (Возможно это не то что надо,но это всё что хоть как то связано с этим вопросом) Снижение теплового сопротивления контакта Применение изоляционных прокладок из окиси бериллия или применение алюминиевых пластинок с глубоким оксидированием поверхности. По критерию Критерий Рейнольдса.
Для цилиндров критерий Рейнольдса имеет следующий вид: · Re < 2200 - ламинарное движение. · Re > 10000 - турбулентное движение. · 2200 < Re < 10000 - переходный режим движения жидкости.
Принцип суперпозиции. При определения полного гидравлического сопротивления РЭС применяется принцип суперпозиции (наложения), согласно которому найденные гидравлические сопротивления отдельных участков РЭС складываются и эта сумма определяет общее сопротивление всего устройства. Пример: два участка канала включены последовательно.
Для параллельных участков.
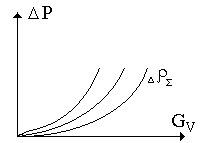
Суммируются расходы сред, а давления остаются постоянными. Характеристики нагнетателя. В системах охлаждения РЭС наибольшее распространение получили центробежные и осевые вентиляторы и центробежные насосы. Характеристики нагнетателя 1гриводятоя в ТУ и задаются в виде
Тепловой поток ребра.
Эффективность ребра.
Практические рекомендации. Оценку эффективности ребра ведут по следующему соотношению:
При повышении числа ребер возрастает теплоотдающая поверхность радиатора, но уменьшается расстояние между ребрами, что приводит к увеличению Пример: охлаждение транзисторов.
Необходимо по проведённому расчёту определить заготовку. Рассмотрим установившийся режим. Важнейшим условием безотказной работы полупроводниковых приборов является применение эффективного теплоотвода, гарантирующего сохранение температуры p-n переходов в допустимых пределах. Применение радиаторов даже в случае, когда мощный транзистор используется с малым коэффициентом нагрузки, увеличивает долговечность его работы.
Естественная конвекция.
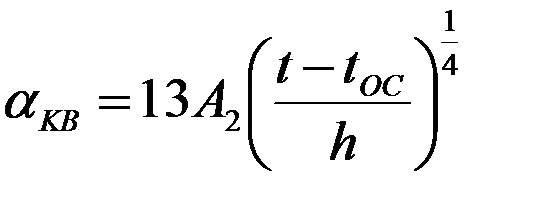
Для естественном конвекции различают 4 режима движения жидкости: 1. n = 0 - плёночный режим движения жидкости. Num = 0,5 - малый температурный напор, тела с плавной геометрией. У поверхности образуется почта неподвижная плёнка нагретой среды и характер теплообмена обусловлен явлением теплопроводности. 2. n = 1. n = 2. n = Расчётные формулы. 1. Закон
где d - диаметр цилиндра [м]; t - температура стенки, с которой происходит теплосъем; А1 - табличный коэффициент; 2. Законы
где L - определяющий размер [мм]. Если неравенство выполняется, то имеет место закон a. Закон Вертикально ориентированная поверхность высотой L.
где А2 - табличный коэффициент. Считается, что дно аппаратуры находится в более худших условиях, поэтому имеем:
Для верха аппаратуры также вводится поправочный коэффициент
b. Закон
Передача тепла излучением.
Если извне на элемент падает тепловой поток, то он распределяется следующим образом: | ||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| Поделиться: |


 .
. .
.





 .
. равной нулю.
равной нулю.  . Следовательно, вся кинетическая энергия, запасённая за время удара, полностью переходит в потенциальную энергию максимально сжатых амортизаторов.
. Следовательно, вся кинетическая энергия, запасённая за время удара, полностью переходит в потенциальную энергию максимально сжатых амортизаторов.

 параметры системы
параметры системы  определяются следующим образом (при
определяются следующим образом (при  ):
):

 .
.



 – собственная частота системы.
– собственная частота системы. – одна из 6-ти парциальных частот:
– одна из 6-ти парциальных частот: 
 – количество слагаемых, которое зависит от конструктивных особенностей системы амортизации, как справа, так и слева участвуют одни и те же парциальные частоты.
– количество слагаемых, которое зависит от конструктивных особенностей системы амортизации, как справа, так и слева участвуют одни и те же парциальные частоты.








 через x, y, z.
через x, y, z.
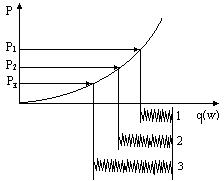
 - 2 - АДФ
- 2 - АДФ - в резонансной зоне.
- в резонансной зоне.








 Данный вид амортизатора реализует диссипативную силу типа: вязкое трение.
Данный вид амортизатора реализует диссипативную силу типа: вязкое трение. , W - основное направление,
, W - основное направление,  - 8, рабочие температуры
- 8, рабочие температуры
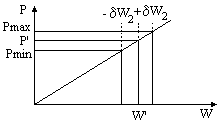
 ; W=0 - т.к. блок при мгновенном воздействии не успевает сдвинуться с места.
2.
; W=0 - т.к. блок при мгновенном воздействии не успевает сдвинуться с места.
2.  - реальное движение объекта. Блок успел сдвинуться на некоторую величину - -
- реальное движение объекта. Блок успел сдвинуться на некоторую величину - - 

 - скорость в любой момент времени;
- скорость в любой момент времени; (- скорость от деформации) и W(t) (-смещение от времени). При этом удаётся проследить поведение системы в любой момент времени.
(- скорость от деформации) и W(t) (-смещение от времени). При этом удаётся проследить поведение системы в любой момент времени. - Расчет по формуле по точкам отстоящих друг от друга на расстоянии
- Расчет по формуле по точкам отстоящих друг от друга на расстоянии 

 - время прохождения какого-либо участка
- время прохождения какого-либо участка , деформация амортизатора равна размеру участка делённого на среднюю скорость на участке, которая равна:
, деформация амортизатора равна размеру участка делённого на среднюю скорость на участке, которая равна:

 .
.
 - упрощённая методика и
- упрощённая методика и  - методика эквивалентного прямоугольного импульса, где Т - период собственных колебании системы, полученный из вибрационного
- методика эквивалентного прямоугольного импульса, где Т - период собственных колебании системы, полученный из вибрационного

 . Чем оно выше, тем эффективнее материал.
. Чем оно выше, тем эффективнее материал.
 между рёбрами, а следовательно и к уменьшению конвективной составляющей теплообмена. При этом уменьшается также и радиационная составляющая теплообмена за счёт многократного переотражения в пространстве между рёбрами.
между рёбрами, а следовательно и к уменьшению конвективной составляющей теплообмена. При этом уменьшается также и радиационная составляющая теплообмена за счёт многократного переотражения в пространстве между рёбрами.
 .
. .
. - плотность тока пропорциональна градиенту напряжения.
- плотность тока пропорциональна градиенту напряжения.  (в тепле).
(в тепле).

 .
.

 - задача.
- задача.







 - тепловая характеристика для случая естественной конвекции.
- тепловая характеристика для случая естественной конвекции. - тепловая характеристика для случая вынужденной конвекции.
- тепловая характеристика для случая вынужденной конвекции.
 - случай естественной конвекции
- случай естественной конвекции - случай вынужденной конвекции.
- случай вынужденной конвекции. и это необходимо учитывать.
и это необходимо учитывать. - применение специальных смазочных жидкостей.
- применение специальных смазочных жидкостей. , где l - размер, наиболее характерный для геометрии тела, участвующего в теплообмене (для шара l = D...); W - скорость движения среды;
, где l - размер, наиболее характерный для геометрии тела, участвующего в теплообмене (для шара l = D...); W - скорость движения среды;  - коэффициент кинематической вязкости.
- коэффициент кинематической вязкости.




 ,где
,где  - напорное давление.
- напорное давление.


 , где
, где  - эмпирические коэффициенты, m - обозначает, что характеристики берутся при средних температурах:
- эмпирические коэффициенты, m - обозначает, что характеристики берутся при средних температурах:  .
.


 10-2
10-2



 y m:val="p"/></m:rPr><w:rPr><w:rFonts w:ascii="Cambria Math" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/></w:rPr><m:t>Г—в„ѓ</m:t></m:r></m:e></m:d></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">
y m:val="p"/></m:rPr><w:rPr><w:rFonts w:ascii="Cambria Math" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/></w:rPr><m:t>Г—в„ѓ</m:t></m:r></m:e></m:d></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  ,
, - теплоотдача плоской и ребристой поверхностей.
- теплоотдача плоской и ребристой поверхностей. ,
, степени.
степени.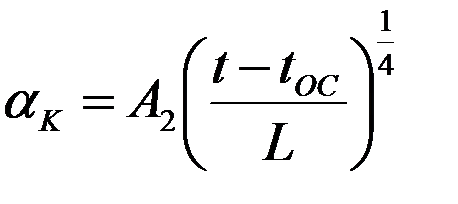 ,
,