Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Свободное движение блока на виброизоляторах, использующих силы сухого трения.Содержание книги
Поиск на нашем сайте
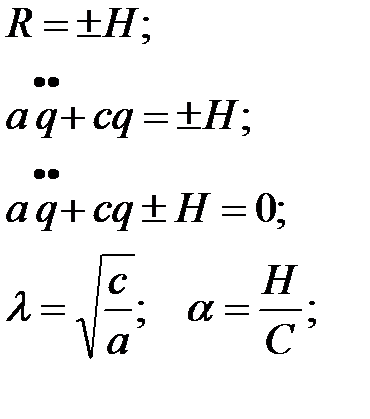
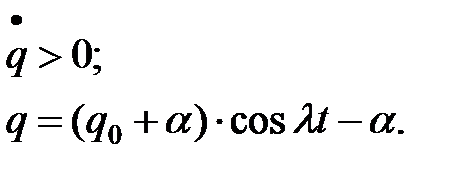
Решение выглядит следующим образом:
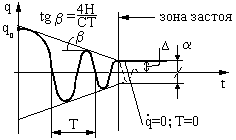
Основные особенности движения систем на амортизаторах с сухим трением. 1. Частота собственных колебаний определяется по формуле 2. Собственные колебания затухающие и затухают по линейному закону. 3. Существует зона застоя для амортизаторов с сухим трением: собственные колебания затухают до нуля. В зоне застоя объект не доходит до положения равновесия расстояние равное
Остановка блока в зоне застоя происходит в момент времени t1, для которого
Наличие зоны застоя объясняется малой величиной потенциальной энергии, которая не может преодолеть силы сухого трения амортизаторов; кинетическая энергия равна нулю. Говорят, что амортизатор для зоны застоя закрыт. Амортизаторы с сухим трением не работают при амплитудах смещения
26. Колебания блока РЭС с шестью степенями свободы. Особенности определения собственных частот системы виброизоляции. S = 6. В основе описания движения системы лежит описание уравнения Лагранжа, которое превращается в систему из 6-ти дифференциальных уравнений. Решение ищется в виде: В системе в 6-ю степенями свободы существует в общем случае 6 собственных частот: Строгое решение исходной системы 6-ти дифференциальных уравнений с учетом всех параметров системы – весьма сложная задача даже для ЭВМ. Значительно проще, чем строгое решение собственные частоты системы при 6-ти степенях свободы могут быть получены при помощи неравенства Релея-Донкерли. Использование указанного неравенства основано на понятии парциальных частот системы с учетом некоторых конструктивных свойств системы амортизации.
Рекомендации по проектированию системы виброизоляции Выполнение указанных рекомендаций позволит спроектировать систему амортизации в одном варианте, удовлетворяющем заданным требованиям: jоб < [ jоб ], где [ jоб ] - допустимое ускорение объекта. 1. Для снижения собственных частот системы и уменьшения их диапазонов, необходимо располагать центр тяжести блока в плоскости, проходящей через точки крепления амортизаторов.
Пример:
возможен также вариант:
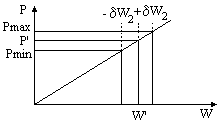
2. При монтаже блока на амортизаторах должно быть гарантировано равенство расчётной и реальной статической, нагрузок на каждый амортизатор.
Эта погрешность приводит к изменению P, а изменение P повлечёт за собой изменение динамической жёсткости коэффициента демпфирования и т.д. 3. При выборе координат установки амортизаторов необходимо стремиться к: выполнению следующей зависимости:
Если рассмотреть формулы для парциальных частот, то можно увидеть, что
и не зависит от координат их установки, т.е. выбрав типоразмер амортизатора, мы однозначно фиксируем 3 парциальные частоты. В то время как поворотные частоты т.е. мы можем управлять 4. При работе в резонансной зоне необходимо выбрать амортизаторы с большим коэффициентом демпфирования. При этом необходимо иметь, по возможности, максимальную связность движения объекта, что определяется отсутствием плоскостей симметрии.
5. Одновременное осуществление вибро- и ударнозащитных свойств в системе может быть достигнуто установкой со сдвоенной опорой - это 2 последовательно расположенных амортизатора. Статическая характеристика сдвоенной опоры.
Нагрузка на все амортизаторы (на 1-ый и на 2-ой) одинакова. Жёсткость суммы амортизаторов определяется формулой:
-это большое преимущество, т.к. чем меньше жёсткость, тем выше изоляционные свойства системы. Динамическая жёсткость определяется:
6. При компоновке блока следует выполнять правило: 6.1 Элемент с наибольшей плотностью следует располагать ближе к точкам установки амортизаторов. В этом случае выдерживается более лучшие соотношения между радиусом инерции блока и координатами амортизаторов. Наиболее тяжёлые элементы надо ставить над амортизаторами. 6.2 Наиболее чувствительные к вибрации элементы надо устанавливать в плоскости, проходящей через точки крепления амортизаторов.
7. Кабель, подводимый к блоку не должен изменять жесткостные и инерционные параметры системы.
Масса кабеля должна быть учтена и дополнена в массу объекта соответствующим образом. 8. Блок на амортизаторах должен быть надёжно заземлён (без изменения жесткостных параметров системы) - из энергетических соображений. Обычно это делается так:
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 388; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.221.114 (0.008 с.) |



 и не зависит от величины диссипативных сил.
и не зависит от величины диссипативных сил. , т.е. существует некоторая амплитуда смещения блока относительно положения равновесия.
, т.е. существует некоторая амплитуда смещения блока относительно положения равновесия.
 и
и  (при
(при 
 .
. т.е. гармонические колебания с определенной амплитудой и частотой.
т.е. гармонические колебания с определенной амплитудой и частотой. . Наша задача определить эти частоты.
. Наша задача определить эти частоты.





 через x, y, z.
через x, y, z.
 - 2 - АДФ
- 2 - АДФ - в резонансной зоне.
- в резонансной зоне.