
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
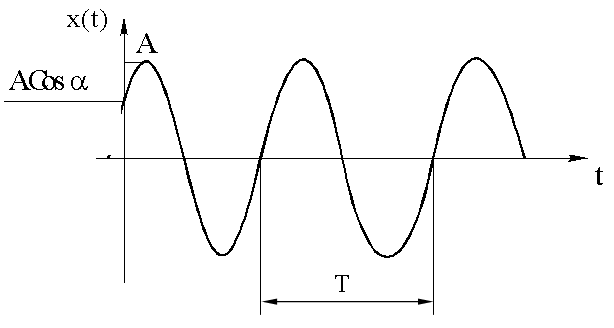
График гармонического колебанияСодержание книги
Поиск на нашем сайте
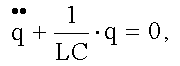
Дифференциальное уравнение гармонических колебаний Колеблющиеся системы Рассмотрим колебания в трех системах: а) колебания заряда в колебательном контуре L,C; б) колебания грузика, прикрепленного к пружине; в) колебание физического маятника - любого тела, совершающего колебания вокруг горизонтальной оси, не проходящей через его центр тяжести.
Мы получили дифференциальные уравнения, описывающие движения наших систем. В первых двух случаях уравнения одинаковы по форме, в третьем случае второй член уравнения содержит не φ, а Sin φ. Если рассматривать только малые отклонения маятника от положения равновесия, то тогда, при φ << 1, Sin φ ≈ φ и мы имеем:
Введем обозначения:
Дифференциальное уравнение колебательного движения Для всех трех рассмотренных случаев имеем одно и то же дифференциальное уравнение колебательного движения
Решение дифференциального уравнения Решением дифференциального уравнения называется функция, обращающая это уравнение в тождество. Нетрудно проверить прямой подстановкой, что в нашем случае решение имеет вид:
т.е. является гармонической функцией. Значит уравнение Сложение колебаний Векторная диаграмма Векторная диаграмма - это способ графического задания колебательного движения в виде вектора.
Вдоль горизонтальной оси откладывается колеблющаяся величина ξ (любой физической природы). Вектор Сложение колебаний одинаковой частоты и одинакового направления Пусть складывается два колебания:
По теореме косинусов Так как
то
Очевидно (см. диаграмму), что начальная фаза результирующего колебания определяется соотношением:
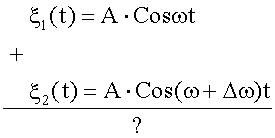
Сложение колебаний близких частот Пусть складывается два колебания с почти одинаковыми частотами, т.е.
Из тригонометрии:
График результирующего колебания - график биений, т.е. почти гармонических колебаний частоты ω, амплитуда которых медленно меняется с частотой Δω Амплитуда из-за наличия знака модуля (амплитуда всегда > 0) частота с которой изменяется амплитуда, равна не Δω /2, а в два раза выше - Δω. Сложение взаимно-перпендикулярных колебаний Пусть маленькое тело колеблется на взаимно-перпендикулярных пружинках одинаковой жесткости. По какой траектории будет двигаться это тело?
Из первого уравнения:
Из второго:
После подстановки: Избавимся от корня:
Частные случаи:
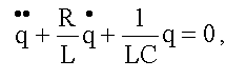
Затухающие колебания Рассмотрим колебания, происходящие в двух системах: а) колебания заряда в колебательном контуре L,C, имеющем активное сопротивление R; б) колебание грузика, прикрепленного к пружинке, учтем влияние трения на движение грузика. Колеблющиеся системы
Дифференциальное уравнение, описывающее затухающие колебания наших двух систем в этих обозначениях будет иметь один и тот же вид
Решение Каким будет его решение? При Наличие затухания, потерь энергии, переход ее из электромагнитной или механической в тепловую приведет к уменьшению амплитуды колебаний с течением времени, станет другой, меньшей чем ω0, и частота колебаний. Предположим, что амплитуда убывает по экспоненциальному закону, т.е. A(t) = A0·e-βt (e=2,71828...), тогда решение будем искать в виде:
Проверка Выясним, при каких условиях эта функция будет решением, для этого найдем
Сгруппируем члены с косинусом и синусом, на A0e-βt сократим:
Для тождественного обращения левой части в ноль надо, что бы коэффициент при косинусе обращался в ноль (коэффициент при синусе обратился в ноль, т.к. мы "удачно" выбрали A(t) = A0βt. Из этого требования следует выражение для - ω частоты затухающих колебаний.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 189; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.162.107 (0.009 с.) |












 .
. ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
 .
. ,
,


 , отложенный из точки 0 равен по модулю амплитуде колебания A и направлен под углом α, равным начальной фазе колебания, к оси ξ. Если привести этот вектор во вращение с угловой скоростью ω, равной циклической частоте колебаний, то проекция этого вектора на ось ξ дает значение колеблющейся величины в произвольный момент времени.
, отложенный из точки 0 равен по модулю амплитуде колебания A и направлен под углом α, равным начальной фазе колебания, к оси ξ. Если привести этот вектор во вращение с угловой скоростью ω, равной циклической частоте колебаний, то проекция этого вектора на ось ξ дает значение колеблющейся величины в произвольный момент времени.

 .
. ,
, .
. .
. ,
,  .
. . Применяя к нашему случаю, получим:
. Применяя к нашему случаю, получим:

 .
.
 Это уравнения траектории в параметрическом виде.
Для получения явной зависимости между координатами x и y надо из уравнений исключить параметр t.
Это уравнения траектории в параметрическом виде.
Для получения явной зависимости между координатами x и y надо из уравнений исключить параметр t.
 ;
;  .
. .
. .
. .
.

















 .
. (отсутствие сопротивления, трения) оно должно переходить в
(отсутствие сопротивления, трения) оно должно переходить в  (см. 14.2).
(см. 14.2). .
. и подставим в дифференциальное уравнение.
и подставим в дифференциальное уравнение.
 .
.


