
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка ПО реального времени для асутп и асниСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
РАЗРАБОТКА ПО РЕАЛЬНОГО ВРЕМЕНИ ДЛЯ АСУТП И АСНИ методическое пособие к выполнению лабораторной работы по дисциплинам “Модульные системы автоматизации физических экспериментов» и «Автоматизация проектирования» для студентов специальности 140306 “Электроника и автоматика физических установок” физико-технического факультета
Томск 2008 г.
УДК 681.32(075) РАЗРАБОТКА ПО РЕАЛЬНОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ REAL-TIME WORKSHOP. Методическое пособие к выполнению лабораторной работы по дисциплинам “Модульные системы автоматизации физических экспериментов» и «Автоматизация проектирования» для студентов специальности 140306 “Электроника и автоматика физических установок” физико-технического факультета. - Томск: Изд-во ТПУ, 2008.- 32 c. Разработали: ассистент кафедры ЭАФУ ФТФ А.В Шарнин
ассистент кафедры ЭАФУ ФТФ А.А. Мезенцев
Рецензенты: доцент кафедры ИКСУ, АВТФ, к.т.н. Е.И. Громаков
доцент кафедры ЭАФУ, ФТФ, к.т.н. А.А. Лысенок
Методическое пособие рассмотрено и рекомендовано к изданию методическим семинаром кафедры ЭАФУ ФТФ «___» ________ 2008г.
Зав. кафедрой ЭАФУ___________________ доцент С.Н.Ливенцов
Зарегистрировано в редакционно-издательском отделе ТПУ №_______от ”___”________2008г.
Председатель учебно-методической комиссии ФТФ, _____________________к.т.н., доцент В.Д. Каратаев Содержание
Цель работы
Целью лабораторной работы является изучение технологии проектирования и разработки ПО реального времени для АСУТП и АСНИ с использованием пакета Real-Time Workshop; приобретение навыков практического применения современной технологии для реализации функций контроля и управления объектом в реальном масштабе времени. 2. Назначение пакета реального времени Real-Time Workshop Real-Time Workshop позволяет на основе моделей, разработанных в Simulink, генерировать оптимизированный код для выбранной аппаратной платформы, отвечающий требованиям пользователя. Диаграмма процесса разработки и прототипирования программного обеспечения в Matlab с использованием Real Time Workshop представлена на Рисунке 1.
Рисунок 1. Диаграмма процесса разработки ПО в Real-Time Workshop На схеме показано, как последовательно происходит формирование построения модели, её верификация, тестирование и исполнение. Для создания модели вначале используется Matlab или Simulink совместно с Matlab. Simulink предоставляет визуальный интуитивно понятный для разработчика интерфейс, что во многих случаях облегчает и ускоряет разработку модели. Процесс моделирования может выполняться непосредственно в Matlab и Smulink, однако для увеличения скорости моделирования предусмотрены дополнительные возможности, в частности режим быстрого симулирования (Rapid Simulation). Процесс тестирования модели Simulink в режиме быстрого симулирования включает прохождение блоков Simulink Code Generator - Rapid simulation, изображенных на диаграмме процесса разработки. При этом блок Rapid simulation выступает в качестве эмулятора оперативного кода С. Для компилирования визуального кода модели Matlab'a (*.mdl) существует блок Simulink Code Generator. Далее, на этапе готовности модели, её безошибочной компиляции в режиме быстрого моделирования, модель может быть подвержена прототипированию, - созданию локальной модели, подобной той, что мы будем использовать при локализации разработанного кода в tagret системе. Этот процесс производится через шаблон процесса - Makefile. Makefile позволяет создать автономную модель с установлением соединения через TCP/IP протокол локально или по сети Ethernet. В данном случае обязанностями блока Raped Prototyping Target является отработка модели реального времени в режим эмуляции межпроцессорного взаимодействия двух различных систем в архитектуре клиент/сервер. Это позволяет быстро обнаружить ошибки и исправить их. Результатом работы данного процесса становится блок External Mode, - полный аналог кода, который будет работать на целевой платформе. В режиме внешнего исполнения (External Mode), скомпилированная модель в процессе работы позволяет отрабатывать запросы на изменение параметров (через recompiling) и отображение процессов протекающих в модели при изменении параметров с использованием всё того же Simulink. Следует отметить, что при изменении параметров настройки модели, вышеописанный цикл повторяется. После завершения цикла настройки модели и проверки всех её режимов работы становится возможным создать так называемый встраиваемый код для индивидуальной автономной работы на целевой платформе. При этом на этапе компиляции в блоке Simulink Code Generator используется специальное приложение, - Real-Time Workshop Embedded Coder, которое функционально производит ответвление протекания процесса на Рисунке 1 в блок Production Target. Это заключительный этап в проектировании. Основное отличие Embedded Code от External Code в том, что первый, уже не требует для своего исполнения дополнительных программных приложений либо специальной операционной системы, он работает с любыми по сложности структурами как с относительными образцами, эталонами сигналов. При этом все прерывания выполняются посредством работы таймера ISR, вызываемого функцией rt_OneStep. В зависимости от функций model_step, вписанной в вашу модель, и от сложности системы (single-rate or multirate), функция rt_OneStep либо просто вызывается, либо становится в очередь на выполнение в буфер задач в соответствии с приоритетом. Таким образом, если ваше устройство содержит блоки драйверов различных устройств (ЦАП, АЦП …) функция model_step будет в фоновом он-лайн режиме производить запись и чтение данных с/в устройства.
Резюмируя, отметим, что результатами работы Real-Time Workshop могут являться программы, предназначенные для решения следующих задач: · Созданной программы для работы в режиме внешнего исполнения External Mode · Создание программы являющейся пользовательской S-функцией S-Function Target · Создание программы для выполнения Simulink-модели в режиме быстрого моделирования Real-Time Workshop Rapid Simulation Target · Кросс-платформенная разработка программного обеспечения для операционной системы VxWorks Target Tornado for Real-Time Application · Кросс-платформенная разработка программного обеспечения для целевой системы реального времени Targeting Real-Time System
External Mode.
Механизм загрузки. Когда вы изменяете параметры на блок диаграмме, Simulink вызывает MEX-file и посылает новые параметры как переменные, вместе с другой информацией. Еxternal interface MEX-file содержит код, который выполняет задачи передачи данных через канал межпроцессорного взаимодействия во внешнюю программу. Передача информации производится в рамках архитектуры клиент/сервер (сторона Simulink – клиент, сторона External Mode – сервер). При этом, когда клиент и сервер локализованы на одной ЭВМ обмен данных производится с использованием общей памяти системы, когда разделены, - по протоколу TCP/IP.
TCP/IP реализация. Real Time Workshop использует протокол TCP/IP для взаимодействия серверной и клиентской частей ПО. Это сопряжение можно выполнить используя специальную структуру - socket, реализующую сетевую передачу сообщений на транспортном уровне. Обе стороны в этом взаимодействии независимы от транспортного уровня. Транспортный уровень и код модели интегрированы в одном модуле, выполняющем форматирование, передачу и приём сообщений или пакеты данных. Архитектура взаимодействия для различных устройств может осуществляться с использованием различных типов транспортных уровней. Например, grt, grt_malloc и Tornado targets поддерживают соединение через TCP/IP, в то время как xPC target поддерживает соединение через RS232 (serial) и TCP/IP.
Рисунок 2. Архитектура External Mode.
MEX-File Optional Arguments В External Target Interface dialog box вы можете указать опции, которые будут посланы в MEX-file:
- слово с разделителями, такое как: 'myPuter' - или IP address с разделителями, такой как: '148.27.151.12' контроль уровня детализации информационного отображения в процессе передачи данных. значения: 0 — no information 1 — detailed information TCP/IP server port number: default значение 17725. Вы можете выбрать номер порта в пределах 256 and 65535 во избежании конфликта.
S-Function Target
Используя S-Function Target, можно создавать S-Function компоненты и использовать их как блоки для разработки программ в Simulink. S-function code format используется приложением S-function target, генерирующим код, который объединяет Simulink C MEX S-функции через API. При помощи этого приложения можно: · генерировать блоки S-Function и использовать их при разработке Simulink-моделей · выполнить конверсию подпрограмм в компоненты · увеличивать скорость моделирования. (во многих случаях S-Function, генерируемая из выполняемой программы, намного эффективнее чем оригинальная модель) · многократно использовать код.
S-function target генерирует не встраиваемыеS-функции. То есть можно генерировать исполняемый файл из модели, которая содержит генерируемую S-функцию, используя generic real-time or real-time malloc targets, но нельзя воспользоваться для этих целей приложением Real-Time Workshop Embedded Coder target.
Targeting Real-Time System
Встроенные возможности Matlab для построения систем реального времени – это: · огромное количество модулей поддержки устройств (плат), производимых компаниями, а также драйверов к ним · большое количество приложений созданных для полнофункциональной работы с устройствами построения, отображения и обработки информации, формируемой на TARGET платформе.
Благодаря такой программной поддержке разработчику предоставляется возможность:
Все перечисленные возможности при targeting'e систем реального времени выполняются посредством множества приложений Matlab and Simulink рассмотрение которых отдельная тематика, однако, некоторые из них выше изложены в этом документе. Посмотреть возможности rtw, в частности блоки, предоставляемые для разработки можно тут: C:\matlab\toolbox\rtw\rtw\rtwlib.mdl
Подготовка к проектированию модели реального времени.
Пакет Matlab, разработанный для проектирования и исследования различного типа систем, содержит, в том числе, возможности создания программного обеспечения реального времени. для осуществления функций реального времени необходимо установить ядро реального времени для вашей системы (Unix, Windows, …). Пакет "Лаборатория реального времени" или Real-Time Workshop содержится в блоке Simulink. Если ядро реального времени на вашем ПК ещё не установлено, то необходимо это сделать следующим образом: в меню пуск, приложения Matlab(левый нижний угол экрана) выбрать пункт Simulink>Средства Windows реального времени>Установить ядро реального времени.
Рис 6. Вид меню пуск.
Для работы компилятора необходимо установить тип компилятора. Пакет Matlab поддерживает работу с 3 типами компиляторов. Для инициализации компилятора воспользуемся функцией " mex -setup ".
Наберите в поле окна команд, запущенyого пакета Matlab, команду mex –setup. далее система выведет запрос на тип компилятора, который вы хотели бы использовать:
Рис 7. Формирование запросов на инициализацию компилятора.
Далее система попросит вас выполнить 2 команды: cd prefdir; // выводит наиболее предпочтительный путь папки, для оптимальной работы системы. mccsavepath; // компилятор сохраняет путь.
Теперь вы готовы к моделированию. Для создания модели необходимо использовать поле новой модели. Выберите меню файл > новый>модель.
Рис 8. Создание нового документа Simulink. Для создания модели в приложении Simulink, пакета Matlab разработаны стандартные блоки. для создания модели, вам могут потребоваться как специализированные, так и общие типы блоков. Библиотеку блоков Real-Time Workshop можно загрузить через меню пуск: пуск>Simulink>Средства Windows реального времени>Библиотека блоков.
Рис 9. Библиотека блоков для Real-Time Workshop.
Так же, эту библиотеку и все остальные библиотеки можно найти в обозревателе библиотек. перейти к нему можно по кнопке:
Рис 10. Запуск библиотеки компонентов.
4. Типовой пример разработки ПО реального времени в пакете Real-Time Workshop
Воспользуемся готовой моделью, созданной разработчиками пакета Matlab.
Рис 11. Модель "Станция управления полётами".
Выберем модель "aero_ats.mdl". Для этого в строке адреса необходимо ввести путь " C:\matlab\toolbox\simulink\simdemos\aerospace\aero_atc.mdl ". После этого в окне откроется сама модель, окно аннотации и окно отображения графиков (если требуется для работы модели). для проверки работоспособности модели, нужно запустить её при помощи кнопки Для создания автономной модели, необходимо задать параметры модели. Для этого в меню Simulation выберем SimulationParameters.. либо комбинацией клавиш Ctrl+E. На экране это выглядит так:
Рис 12. Изменение параметров моделирования.
После этого на экране появится окно параметров. Для задания параметров используем окно решателя (Solver) и окно лаборатории реального времени (Real-Time Workshop), которые выглядят так:
Рис 13. Окна параметров компилятора.
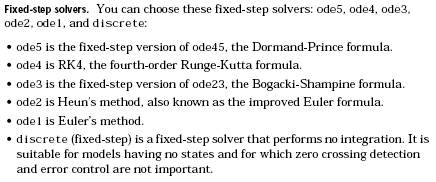
Для компилятора важными являются следующие параметры: · время моделирования (старт и стоп) · тип шага (выбираем фиксированный шаг) подробнее: (Real-Time Windows Target: Preface: Simulink) (Using Simulink: How Simulink Works: Determining Step Size for Discrete Systems) · значение шага (задаём 0.01) · режим работы модели (выбираем авто) · алгоритм работы решателя (выбираем ade5)
Время моделирования – это время в течение которого работает модель. При этом можно задать значение шага при фиксированном типе шага. В данном случае выбираем шаг 0.01 с. Так же можно выбрать режим работы модели. Доступные режимы: автоматически выбирается моделью, однозадачный и многозадачный В зависимости от типа и сложности решаемой задачи выбирается алгоритм работы решателя. В данном случае алгоритм работы решателя выбираем ade5 это основной алгоритм для расширенного круга задач. Д анное меню предлагает 6 типов алгоритмов, основанных на различных формулах (на основе формулы Dormand-Prince, формулы Runge-Kutta и.т.д.)
Рис 14. Используемые типы шага при построении модели.
Второе, рассматриваемое окно, предлагает задать параметры Real-Time Workshop. В данном окне необходимо задать настраиваемую категорию и затем параметры этой категории. В списке пользователю предлагается настроить 6 категорий: · конфигурация модели · TLC отладка · общие параметры генерации кода объекта · основные опции вида выходного кода · опции генерации кода GRT В разделе "конфигурация модели" задаются параметры: · системный целевой файл · шаблон исполняемого файла · формат команды make В данном случае, при нажатии на кнопку "просмотреть" выводится список всех доступных целевых конфигураций системы. В этом разделе необходимо выбрать grt.tlc это стандартная конфигурация для генератора реального времени. После выбора целевого файла для генератора реального времени, остальные параметры автоматически заполняются. Шаблон исполняемого файла – это необходимый для компилятора параметр при построении рабочей директории и системных файлов. (выбирается системой автоматически) Формат команды make - это стандартная команда, поставляемая вместе с пакетом Matlab для лаборатории реального времени она находится в одной из системных директорий Matlab с именем make_rtw.m.(выбирается системой автоматически) подробнее: Real-Time Workshop: Code Generation and the Build Process: Target Configuration Options
После настройки, окно параметров выглядит так:
Рис 15. Окно настройки параметров конфигурации цели для RTW.
В разделе "TLC отладка" настраивается конфигурация процесса построения кода и работы компилятора, а так же имеется возможность включения режима диалога при построении кода. Требования к этому разделу: необходимо, что бы все флажки были сняты.
После настройки, окно параметров выглядит так:
Рис 16. Окно настройки параметров TLC отладки для RTW.
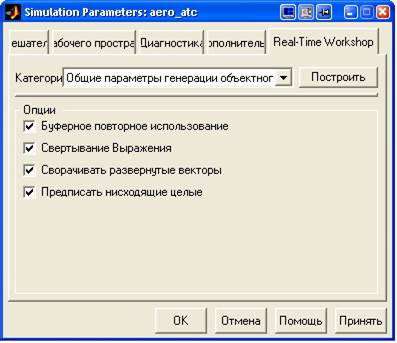
В разделе " Общие параметры генерации кода объекта " нужно поставить флажки в пунктах: · подробные построения · генерация отчёта · локальный вывод блока По показаниям отчёта, после генерации кода можно видеть полный результат работы компилятора. Это созданные *.с и *.h файлы. версию компилятора, некоторые настройки модели и время создания файла. Так же отчёт содержит полный путь к рабочей директории созданных им файлов. Это должна быть созданная вами рабочая директория.
После настройки, окно параметров выглядит так:
Рис 17. Окно настройки общих параметров генерации кода для RTW.
Рис 18. Пример отчёта о выполненной работе.
Следующий раздел, с аналогичным названием, так же содержит настройки генерации модели. В этом разделе все флажки должны быть выставлены. После настройки, окно параметров выглядит так:
Рис 19. Окно настройки общих параметров генерации кода для RTW
В разделе "Основные опции вида выходного кода" флажки должны быть выставлены в пунктах "Ставить имя модели перед глобальными идентификаторами" и "Генерировать комментарии", как это показано ниже. Эти опции позволят прослеживать работу компилятора при построении кода.
После настройки, окно параметров выглядит так:
Рис 20. Окно настройки параметров выходного кода для RTW.
В последнем разделе "опции генерации кода GRT" указываются параметр MAT-файла (rt_, _rt, non), модель внешнего уровня и игнорировать хранение классов. А так же необходимо указать External mode для внешнего исполнения нашей модели. После настройки, окно параметров выглядит так:
Рис 21. Окно настройки генератора реального времени.
По окончании конфигурирования модели и процесса работы компилятора можно приступать к генерированию кода. Запуск компилятора производится кнопкой "Построить". После чего в окне команд компилятор начинает выводить комментарии о производимых операциях. Так как мы задали автоматическое построение кода, то компилятор не использует диалоговый режим. по окончании процесса выводится сообщение: ### Successful completion of Real-Time Workshop build procedure for model: aero_atc >> которое говорит о том, что процесс успешно завершён. Так как мы задали параметр вывода отчёта, то в окне "Help" должен быть сконфигурирован полный отчёт о проделанной работе, а заданной вами рабочей директории создан файл aero_atc.exe. Данный файл при его запуске, входит в режим внешнего выполнения (выполняется автоматически без участия Matlab), как и ставилось целью данной работы. Однако, для представления результатов, необходим Matlab, который используется как редактор исходной модели и среда для вывода визуальной информации. Также существует дополнительная возможности настройки внешнего управления и представления результатов на другой рабочей станции, возможность настройки связи с Matlab по цифровым интерфейсам периферийных устройств или по протоколу TCP/IP. Для примера работы модели, воспользуемся протоколом TCP/IP в рамках вашего рабочего ПК. Для этого необходимо запустить созданный вами файл aero_atc.exe в командной строке. Вызов командной строки может осуществляться следующим образом: Меню Пуск -> Выполнить -> набрать cmd -> нажать ОК. Для запуска модели в командной строке появившегося окна набрать: aero_atc.exe –tf inf –w. Для работы в команднойстроке смотрите ПАМЯТКУ ПО СЁРФИНГУ В DOS Настройка параметров связи После того, как вы запустите exe файл, программа начнёт выполняться. Для связи с TARGET платформой, необходимо создать и запустить соединение. Для настройки соединения, требуется вызвать окно канала связи в меню Tools/External mode control panel… (Рисунок 22)
Рис 22. Запуск меню настройки канала.
Для рассматриваемой модели используются параметры заданные по умолчанию. После этого необходимо ввести модель в режим внешнего исполнения, меню в верхней-средней части (рис 23)экрана и нажать на кнопку Соединение.
Рис 23. Запуск связи с объектом
Затем соседней кнопкой передадим команду «запуск» программе aero_atc.exe. В результате на экране начнётся отображение процессов, протекающих в модели. Напомню, что в данном случае используется протокол TCP/IP для реализации механизмов межпроцессного взаимодействия в пределах одной ЭВМ – HOST-компьютера. Однако, модель будет работать аналогично и в случае когда внешняя программ будет запущена на другом компьютере (TARGET платформе). Задания на лабораторную работу.
6. Список контрольных вопросов 7. Порядок выполнения работы
1. В Simulink создать модель в соответствии с индивидуальным заданием. Настроить параметры компиляции и сгенерировать код для запуска в режиме внешнего исполнения Matlab для двух случаев: 1) запуск кода и визуализация в Simulink на одном компьютере; 2) запуск кода и визуализация в Simulink на разных компьютерах. Провести эксперимент. РАЗРАБОТКА ПО РЕАЛЬНОГО ВРЕМЕНИ ДЛЯ АСУТП И АСНИ методическое пособие к выполнению лабораторной работы по дисциплинам “Модульные системы автоматизации физических экспериментов» и «Автоматизация проектирования» для студентов специальности 140306 “Электроника и автоматика физических установок” физико-технического факультета
Томск 2008 г.
УДК 681.32(075) РАЗРАБОТКА ПО РЕАЛЬНОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ REAL-TIME WORKSHOP. Методическое пособие к выполнению лабораторной работы по дисциплинам “Модульные системы автоматизации физических экспериментов» и «Автоматизация проектирования» для студентов специальности 140306 “Электроника и автоматика физических установок” физико-технического факультета. - Томск: Изд-во ТПУ, 2008.- 32 c. Разработали: ассистент кафедры ЭАФУ ФТФ А.В Шарнин
ассистент кафедры ЭАФУ ФТФ А.А. Мезенцев
Рецензенты: доцент кафедры ИКСУ, АВТФ, к.т.н. Е.И. Громаков
доцент кафедры ЭАФУ, ФТФ, к.т.н. А.А. Лысенок
Методическое пособие рассмотрено и рекомендовано к изданию методическим семинаром кафедры ЭАФУ ФТФ «___» ________ 2008г.
Зав. кафедрой ЭАФУ___________________ доцент С.Н.Ливенцов
Зарегистрировано в редакционно-издательском отделе ТПУ №_______от ”___”________2008г.
Председатель учебно-методической комиссии ФТФ, _____________________к.т.н., доцент В.Д. Каратаев Содержание
Цель работы Целью лабораторной работы является изучение технологии проектирования и разработки ПО реального времени для АСУТП и АСНИ с использованием пакета Real-Time Workshop; приобретение навыков практического применения современной технологии для реализации функций контроля и управления объектом в реальном масштабе времени. 2. Назначение пакета реального времени Real-Time Workshop Real-Time Workshop позволяет на основе моделей, разработанных в Simulink, генерировать оптимизированный код для выбранной аппаратной платформы, отвечающий требованиям пользователя. Диаграмма процесса разработки и прототипирования программного обеспечения в Matlab с использованием Real Time Workshop представлена на Рисунке 1.
Рисунок 1. Диаграмма процесса разработки ПО в Real-Time Workshop На схеме показано, как последовательно происходит формирование построения модели, её верификация, тестирование и исполнение. Для создания модели вначале используется Matlab или Simulink совместно с Matlab. Simulink предоставляет визуальный интуитивно понятный для разработчика интерфейс, что во многих случаях облегчает и ускоряет разработку модели. Процесс моделирования может выполняться непосредственно в Matlab и Smulink, однако для увеличения скорости моделирования предусмотрены дополнительные возможности, в частности режим быстрого симулирования (Rapid Simulation). Процесс тестирования модели Simulink в режиме быстрого симулирования включает прохождение блоков Simulink Code Generator - Rapid simulation, изображенных на диаграмме процесса разработки. При этом блок Rapid simulation выступает в качестве эмулятора оперативного кода С. Для компилирования визуального кода модели Matlab'a (*.mdl) существует блок Simulink Code Generator. Далее, на этапе готовности модели, её безошибочной компиляции в режиме быстрого моделирования, модель может быть подвержена прототипированию, - созданию локальной модели, подобной той, что мы будем использовать при локализации разработанного кода в tagret системе. Этот процесс производится через шаблон процесса - Makefile. Makefile позволяет создать автономную модель с установлением соединения через TCP/IP протокол локально или по сети Ethernet. В данном случае обязанностями блока Raped Prototyping Target является отработка модели реального времени в режим эмуляции межпроцессорного взаимодействия двух различных систем в архитектуре клиент/сервер. Это позволяет быстро обнаружить ошибки и исправить их. Результатом работы данного процесса становится блок External Mode, - полный аналог кода, который будет работать на целевой платформе. В режиме внешнего исполнения (External Mode), скомпилированная модель в процессе работы позволяет отрабатывать запросы на изменение параметров (через recompiling) и отображение процессов протекающих в модели при изменении параметров с использованием всё того же Simulink. Следует отметить, что при изменении параметров настройки модели, вышеописанный цикл повторяется. После завершения цикла настройки модели и проверки всех её режимов работы становится возможным создать так называемый встраиваемый код для индивидуальной автономной работы на целевой платформе. При этом на этапе компиляции в блоке Simulink Code Generator используется специальное приложение, - Real-Time Workshop Embedded Coder, которое функционально производит ответвление протекания процесса на Рисунке 1 в блок Production Target. Это заключительный этап в проектировании. Основное отличие Embedded Code от External Code в том, что первый, уже не требует для своего исполнения дополнительных программных приложений либо специальной операционной системы, он работает с любыми по сложности структурами как с относительными образцами, эталонами сигналов. При этом все прерывания выполняются посредством работы таймера ISR, вызываемого функцией rt_OneStep. В зависимости от функций model_step, вписанной в вашу модель, и от сложности системы (single-rate or multirate), функция rt_OneStep либо просто вызывается, либо становится в очередь на выполнение в буфер задач в соответствии с приоритетом. Таким образом, если ваше устройство содержит блоки драйверов различных устройств (ЦАП, АЦП …) функция model_step будет в фоновом он-лайн режиме производить запись и чтение данных с/в устройства. Резюмируя, отметим, что результатами работы Real-Time Workshop могут являться программы, предназначенные для решения следующих задач: · Созданной программы для работы в режиме внешнего исполнения External Mode · Создание программы являющейся пользовательской S-функцией S-Function Target · Создание программы для выполнения Simulink-модели в режиме быстрого моделирования Real-Time Workshop Rapid Simulation Target · Кросс-платформенная разработка программного обеспечения для операционной системы VxWorks Target Tornado for Real-Time Application · Кросс-платформенная разработка программного обеспечения для целевой системы реального времени Targeting Real-Time System
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-19; просмотров: 532; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.186.62 (0.018 с.) |








 или из окна "Запустить редактор":
или из окна "Запустить редактор":




 . При нормальной работоспособности модели, можно приступать к созданию автономного EXE файла.
. При нормальной работоспособности модели, можно приступать к созданию автономного EXE файла.










 Сгенерировать код для запуска модели в режиме внешнего исполнения в соответствии с порядком выполнения лабораторной работы.
Сгенерировать код для запуска модели в режиме внешнего исполнения в соответствии с порядком выполнения лабораторной работы.
 Сгенерировать код для запуска модели в режиме внешнего исполнения в соответствии с порядком выполнения лабораторной работы.
Сгенерировать код для запуска модели в режиме внешнего исполнения в соответствии с порядком выполнения лабораторной работы.



