
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор сечение проводников по допустимой потере напряжения по условию постоянной плотности тока на всех участках сетиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Сечения проводов отдельных участков сети при расчете по потере напряжения по условию постоянной плотности тока определяются по формулам:
где
где L - общая длина, равная длине магистрали и наибольшей длине ответвления, м. Билет 14 Расчет токов кз в сетях дл 1000 В Режим аварийного короткого замыкания по разным причинам достаточно часто возникает в электрических сетях. Все аппараты, линии, шины должны быть термически и динамически устойчивыми в течение заданного времени, определяемого временем срабатывания защиты и отключающей аппаратуры, к действию токов короткого замыкания. Для правильного.выбора аппаратуры и настройки релейной защиты проводится расчет токов короткого замыкания. При расчёте токов короткого замыкания принимаются следующие допущения: 1) магнитные системы считаются ненасыщенными; 2) токи намагничивания трансформаторов незначительны; 3) симметрия трёхфазной системы сохраняется; 4) ёмкостные проводимости пренебрежительно малы; 5) активные сопротивления существенно меньше индуктивных; 6) качаний синхронных машин до отключения повреждения не наблюдаются.
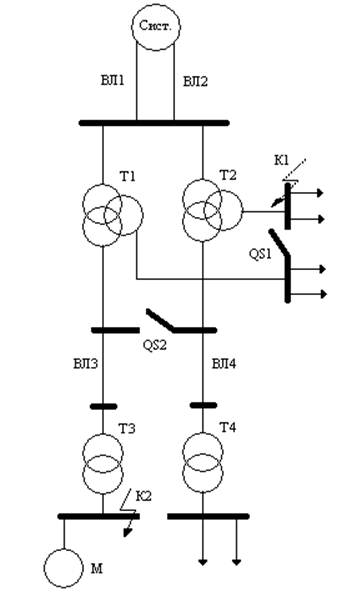
рис.1 Система энергоснабжения. Расчёт начинают с составления cxeмы, в которую входят все элементы сети от источников питания до места короткого замыкания. На основании схемы СЭС и характеристик её элементов определяют параметры схемы эамещения, приведённые к одному (базисному) напряжению. Для расчёта токов короткого замыкания необходимо выбрать базисное напряжение. В качестве базовой ступени наряжения обычно принимается ступень трансформации,на которой рассчитывается ток короткого замыкания. При необходимости определения токов короткого замыкания в нескольких точках с разными ступенями напряжений в качестве базовой ступени принимается энергосистема и её напряжение. Найденные токи коротких замыканий пересчитывают с учётом напряжения тех ступеней, где они возникают. Формулалар: Сопротивление энергосистемы
Сопротивление воздушных линий ВЛ1 и ВЛ2
Динамическая уст асинх двиг Снижение напряжения на зажимах двигателя или рост механического момента на его валу вызывает появление избыточного тормозящего момента Если восстановление напряжения или момента произойдет при скольжении При возникновении избыточного момента на валу двигателя ускорение ротора прямо пропорционально избыточному моменту и обратно пропорционально моменту инерции и может быть записано в виде
где
Подставляя уравнение (13.2) в (13.1) и выражая
где Уравнение (13.3) описывает движение ротора двигателя при больших возмущениях и называется уравнением движения ротора асинхронного двигателя. Это уравнение нелинейно, его решение может быть получено с помощью любого из методов численного интегрирования. Наиболее просто это решение получается, если разбить ось абсцисс функции
и время от момента нарушения режима до конца любого n -го интервала определится как.
Точность решения зависит от величины Получив таким, образом зависимость
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-20; просмотров: 579; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.255.122 (0.007 с.) |


 - токи участков линии, а;
- токи участков линии, а;
 - удельная проводимость провода, м/ом мм2;
- удельная проводимость провода, м/ом мм2; - допустимая потеря напряжения в линии с активными нагрузками.
- допустимая потеря напряжения в линии с активными нагрузками. - сумма произведений длины каждого из участков в метрах на коэффициент мощности - подсчитывается от начала линии до конца того ответвления, для которого эта сумма получается наибольшей.
- сумма произведений длины каждого из участков в метрах на коэффициент мощности - подсчитывается от начала линии до конца того ответвления, для которого эта сумма получается наибольшей.




 (рисунок 13.2). Как при снижении напряжения, так и при увеличении механического момента (последний превосходит максимальное значение электромагнитного момента
(рисунок 13.2). Как при снижении напряжения, так и при увеличении механического момента (последний превосходит максимальное значение электромагнитного момента  ) скольжение двигателя будет увеличиваться и он опрокинется. Чтобы этого не произошло, надо своевременно восстановить напряжение или уменьшить механический момент. Если прежнее значение напряжения или момента будет восстановлено при скольжении
) скольжение двигателя будет увеличиваться и он опрокинется. Чтобы этого не произошло, надо своевременно восстановить напряжение или уменьшить механический момент. Если прежнее значение напряжения или момента будет восстановлено при скольжении  (рисунок 13.2), то на вал двигателя будет действовать ускоряющий избыточный момент
(рисунок 13.2), то на вал двигателя будет действовать ускоряющий избыточный момент  , который вернет двигатель в устойчивый режим работы со скольжением
, который вернет двигатель в устойчивый режим работы со скольжением  .
. , то избыточный момент
, то избыточный момент  будет иметь тормозной характер и двигатель опрокинется. Как же определить время, в течение которого будет достигнуто то или иное значение скольжения? Для этого необходимо решить уравнение движения ротора двигателя.
будет иметь тормозной характер и двигатель опрокинется. Как же определить время, в течение которого будет достигнуто то или иное значение скольжения? Для этого необходимо решить уравнение движения ротора двигателя.
 – разность электромагнитного момента двигателя и момента сопротивления приводимого механизма;
– разность электромагнитного момента двигателя и момента сопротивления приводимого механизма;  – момент инерции, причем
– момент инерции, причем  ,
,  – момент инерции двигателя,
– момент инерции двигателя,  – приведенный момент механизма с учетом разных номинальных скоростей вращений;
– приведенный момент механизма с учетом разных номинальных скоростей вращений;  – угловая скорость вращения двигателя, которая может быть выражена через скольжение следующим образом:
– угловая скорость вращения двигателя, которая может быть выражена через скольжение следующим образом:
 в относительных номинальных единицах двигателя, получим
в относительных номинальных единицах двигателя, получим
 , а
, а  – номинальная мощность двигателя.
– номинальная мощность двигателя. на ряд равных интервалов
на ряд равных интервалов  (рисунок 13.3). Тогда уравнение движения на любом интервале будет иметь вид
(рисунок 13.3). Тогда уравнение движения на любом интервале будет иметь вид

 и возрастает с ее уменьшением.
и возрастает с ее уменьшением. , можно определить скольжение, соответствующее времени
, можно определить скольжение, соответствующее времени  на рисунке 13.1. Зная это значение, можно судить о динамической устойчивости двигателя.
на рисунке 13.1. Зная это значение, можно судить о динамической устойчивости двигателя.


