
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Завдання до курсового проектуСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Робочі матеріали
ДО КУРСОВОГО ПРОЕКТУ З ДИСЦИПЛІНИ
„ЕЛЕКТРОПРИВОД ТА АВТОМАТИЗАЦІЯ ЗАГАЛЬНОПРОМИСЛОВИХ МЕХАНІЗМІВ”
ДЛЯ СТУДЕНТІВ УСІХ ФОРМ НАВЧАННЯ НАПРЯМУ
6.050702 – “ЕЛЕКТРОМЕХАНІКА”
Полтава 2015 Робочі матеріали до курсового проекту з дисципліни „Електропривод та автоматизація загальнопромислових механізмів” для студентів усіх форм навчання напряму 6.050702 – „Електромеханіка”. – Полтава: ПолтНТУ, 2015. – 34 с.
Укладачі: О. В. Шефер, кандидат технічних наук, доцент;
Відповідальний за випуск: О. В. Шульга, завідувач кафедри автоматики та електропривода, доктор технічних наук, професор
Рецензенти: С. Г.Кислиця, кандидат технічних наук, доцент; В. М. Галай, кандидат технічних наук, доцент
Затверджено на засіданні кафедри автоматики та електропривода Протокол № 3 від 30 вересня 2015 р
Редактор Є. В. Найчук
Верстка С. М. Микільченко
45.21.01.01
1 МЕТА КУРСОВОГО ПРОЕКТУ.. 4
2 ЗАГАЛЬНІ ВКАЗІВКИ.. 4 2.1 ЗАВДАННЯ ДО КУРСОВОГО ПРОЕКТУ.. 4 2.2 ЗМІСТ ПОЯСНЮВАЛЬНОЇ ЗАПИСКИ І ГРАФІЧНОЇ ЧАСТИНИ КУРСОВОГО ПРОЕКТУ.. 5
3 МЕТОДИЧНІ ВКАЗІВКИ ДО ВИКОНАННЯ РОЗДІЛІВ ПРОЕКТУ.. 6 3.1 ПОЧАТКОВІ ДАНІ. 6 3.2 ЗАГАЛЬНІ ВІДОМОСТІ ПРО МОСТОВІ КРАНИ.. 6 3.3 РОЗРАХУНОК МЕХАНІЗМУ ПІДНІМАННЯ.. 6 3.3.1 Вибір поліспаста. 6 3.3.2 Розрахунок і вибір каната. 7 3.3.3 Вибір барабана. 8 3.3.4 Орієнтовний розрахунок передавального числа редуктора механізму піднімання 9 3.3.5 Розрахунок потужності та попередній вибір електродвигуна механізму піднімання 10 3.3.6 Вибір гальма механізму піднімання. 13
3.4 РОЗРАХУНОК МЕХАНІЗМУ ПЕРЕСУВАННЯ МОСТА (ВІЗКА) 13 3.4.1 Розрахунок потужності та попередній вибір електродвигуна механізму пересування. 14 3.4.2 Вибір гальма механізму пересування. 15
3.5 ПОБУДОВА НАВАНТАЖУЮЧИХ ДІАГРАМ І ПЕРЕВІРКА ВИБРАНИХ ДВИГУНІВ МЕХАНІЗМІВ КРАНА 17 3.5.1 Перевірка на нагрівання електродвигуна механізму підйому. 17 3.5.2 Перевірка на нагрівання електродвигуна механізму пересування крана. 20
3.6 РОЗРАХУНОК І ВИБІР ЕЛЕКТРООБЛАДНАННЯ.. 21 3.6.1 Вибір схем керування електроприводом механізму крана. 21 3.6.2 Розрахунок і вибір ступенів опорів. 21
3.7 РОЗРАХУНОК ПРИРОДНОЇ ТА ШТУЧНИХ МЕХАНІЧНИХ ХАРАКТЕРИСТИК. РОЗРАХУНОК ПУСКОВОЇ ДІАГРАМИ ДЛЯ ЕЛЕКТРОПРИВОДА МЕХАНІЗМІВ КРАНА
……………………………………………………………………………………………………………………...... 24 3.8 РОЗРАХУНОК І ПОБУДОВА ЕЛЕКТРОМЕХАНІЧНИХ ПЕРЕХІДНИХ ПРОЦЕСІВ ПРИ ПУСКУ ЕЛЕКТРОПРИВОДІВ МЕХАНІЗМІВ КРАНА.. 25
СПИСОК ЛІТЕРАТУРИ.. 27
Додаток А.. 28 Додаток Б..……………………………………………………………………………………………………………......30 Додаток В…………………………………………………………………………………………………………………31 Додаток Г ………………………………………………………………………………………………………………...32 Додаток Д..........................................................................................................................................................................33 Додаток Е ……………………………………………………………………………………………………………….34 МЕТА КУРСОВОГО ПРОЕКТУ Закріплення та поглиблення теоретичних знань студентів напряму 6.050702 –„Електромеханіка”; уміння практично застосовувати ці знання при розв’язанні інженерних задач у галузі автоматизованого електропривода конкретного загальнопромислового механізму – мостового крана.
ЗАГАЛЬНІ ВКАЗІВКИ Студент повинен вивчити конструктивні особливості та призначення мостового крана, розміщення електричного чи механічного обладнання, кінематику основних механізмів та вимоги до електропривода: повинен уміти розраховувати статичне навантаження механізмів пересування і піднімання, вибирати для цих механізмів електрообладнання й елементи кінематичних ланок, набути навики дослідження електромеханічних перехідних процесів та аналізу принципових електричних схем керування електроприводами основних механізмів мостового крана. ЗАВДАННЯ ДО КУРСОВОГО ПРОЕКТУ Тема проекту – „Розрахунок автоматизованих електроприводів мостових кранів”. Із початкових технічних даних мостових кранів загального призначення, наведених у додатку, потрібно: 1. Розрахувати статичні навантаження і вибрати елементи кінематики механізмів крана. 2. Зробити попередній вибір потужності електродвигунів механізмів крана методом середньоквадратичного моменту або потужності. 3. Вибрати стандартні схеми керування електродвигунами механізмів крана при середній кількості виконань у годину більше ніж 120. Вид струму – змінний, напруга мережі Uс = 380 В.
4. Розрахувати величини ступенів пускових опорів та скласти схему з’єднання їх елементів. 5. Розрахувати і побудувати природні й штучні характеристики електродвигуна механізму піднімання та пересування, порівняти одержані розрахункові характеристики з каталоговими. 6. Розрахувати і побудувати криві електромеханічних перехідних процесів S = f(t), M = f(t) під час пуску електропривода механізму піднімання чи механізму пересування крана. МЕТОДИЧНІ ВКАЗІВКИ ДО ВИКОНАННЯ РОЗДІЛІВ ПРОЕКТУ ПОЧАТКОВІ ДАНІ Початкові технічні дані для проектування наводяться у джерелі [1] або додатку і повідомляються викладачем кожному студентові індивідуально відповідно до номера завдання. Виконання курсового проекту за завданням, не погодженим із викладачем, забороняється. РОЗРАХУНОК МЕХАНІЗМУ ПІДНІМАННЯ За механізм піднімання мостових кранів править барабанна лебідка, основними елементами якої є поліспаст, канати, барабан та редуктор. Кінематична схема механізму подана в роботі [2, рис. 19]; на ній видно, що збоку швидкохідного вала редуктора встановлено механічне гальмо і з’єднувальна муфта, яка керує одночасно й головним шківом. Вибір поліспаста Як відомо, поліспаст – система обкручених канатом рухомих і нерухомих блоків, яка забезпечує виграш або в силі, або у швидкості. Поліспаст характеризується кратністю, або передаточним числом,
де
z – кількість несучих гілок каната в поліспасті; а – кількість гілок каната, які спускаються з барабана. Кранові поліспасти виготовляються простими або здвоєними. У мостових кранах використовуються тільки здвоєні поліспасти, тому кількість гілок каната, що спускаються з барабана, завжди дорівнює а = 2. Кількість несучих гілок каната слід вибрати за таблицею 1. Розрахунок і вибір каната Згідно з правилами Держтехнагляду, канат слід вибирати за розрахунковим розривним зусиллям каната Sp у такому порядку: визначити найбільше зусилля S, яке припадає на одну гілку каната,
де
z – кількість несучих гілок каната в поліспасті;
Таблиця 1 Таблиця 2 Коефіцієнти е,
Вибір каната згідно з ДСТУ виконується за розрахунковим розривним зусиллям Sp з праці [1, дод. 1, c. 10] із дотриманням умови sk > sp, де Sк – найбільше розривне зусилля у вибраному з роботи [1] канаті. Необхідно мати на увазі, що в кранах загального призначення найбільш часто використовуються канати з межею міцності при розтяганні 120 – 240 кг/мм2. Отже, вибравши канат за розрахунковим розривним зусиллям Sp із відповідною межею міцності при розтяганні з праці [1], необхідно розрахувати фактичний коефіцієнт запасу міцності вибраного каната Кз.ф. і порівняти його з коефіцієнтом запасу міцності кЗ, прийнятим за таблицею 2,
Міцність каната забезпечується, якщо виконується умова
де Η – висота піднімання вантажу, м; z – кількість несучих гілок каната в поліспасті. Вибір барабана У механізмах піднімання з безпосереднім навиванням на барабан, як відомо, використовують здвоєний поліспаст, який забезпечує вертикальне переміщення вантажу при підніманні та опусканні, однакове навантаження на підшипник барабана і ходові колеса візка. Канатні барабани кранів виготовляються литими або зварними й мають дві гвинтові нарізки (ліву і праву). Барабани найчастіше встановлюються з жорстким кріпленням на валах чи осях, що обертаються за допомогою підшипників хитання або ковзання. Передача обертального моменту від привідного електродвигуна до барабана здійснюється через редуктор, з’єднаний із барабаном за допомогою зубчастих муфт та фланцевих з’єднань. Діаметр канатного барабана визначається згідно з нормами Держтехнагляду за формулою
де е – коефіцієнт, який залежить від режиму експлуатації механізму (див. табл. 2);
Вибір барабана проводиться за розрахунковим діаметром Діаметри робочих блоків у поліспасті також визначаються співвідношенням (6), а їх вибір здійснюється за роботою [1, дод. 2 – 4, с. 10 – 11]. Таблиця 3 Значення ККД для механізму крана
Рис.1. Залежності
Статичний момент при підйомі порожнього вантажозахватного пристрою розраховують за формулою
де У режимах спуску розрізняють силовий спуск і спуск гальмуванням вантажів. Силовий спуск застосовують для легких вантажів, сила важкості яких не спроможна подолати сили тертя в механізмі. У цьому випадку статичний момент Мс зумовлений дією сили важкості вантажу, що спускається, меншої від моменту тертя в крановому механізмі Μη, і спуск вантажу виконується електродвигуном, увімкненим на спуск (III квадрант).
Спуск гальмуванням використовують при спусканні важких вантажів (Мс > Мтр,); при цьому для запобігання вільному падінню вантажу електродвигун створює гальмівний момент (спуск або в режимі рекуперації, або в режимі противвімкнення – IV квадрант), переходячи в генераторний режим і обмежуючи швидкість спуску. При спуску гальмуванням номінального вантажу
а момент, що розвивається електродвигуном при силовому спуску вантажу, визначається співвідношенням
де
При силовому спуску порожнього вантажозахватного пристрою момент, що розвивається електродвигуном, з урахуванням співвідношень (17) і (18) розраховується за формулою
Попередній вибір потужності двигуна механізму піднімання здійснюється методом середньоквадратичного моменту
де При відсутності точних даних стосовно часу перехідних процесів приймають
Тоді вираз (20) матиме вигляд
Для обліку перехідних процесів в електроприводі при пуску і гальмуванні попередній розрахунок потужності двигуна, кВт, здійснюється з деяким запасом
де
Мср – середньоквадратичний момент, Н·м. Перерахунок потужності двигуна, кВт, на стандартну тривалість (ПВ) у відсотках проводиться за спрощеною формулою
де Ρ – потужність двигуна при розрахунковій (заданій) тривалості ввімкнення ТВ, %. За розрахунковим значенням потужності Рк і відповідною їй стандартною тривалістю включення ТВк, а також за заданою синхронною швидкістю
де Після вибору двигуна слід уточнити передавальне число редуктора і визначити фактичну швидкість підйому вантажу υпф:
де
За потужністю рн, уточнюваним передавальним числом Фактична швидкість підйому вантажу
де Отримане значення υп.ф. повинно мало відрізнятися від величини заданої швидкості підйому υп. РОЗРАХУНОК МЕХАНІЗМУ ПЕРЕСУВАННЯ МОСТА (ВІЗКА) Кінематична схема механізму пересування моста і візка подана в праці [2, с. 105,118]. Для передавання обертового моменту від двигунадо привідних коліс використовується редуктор, передавальне число якого визначається за заданою швидкістю пересування механізму νк і синхронною швидкістю привідного двигуна
Швидкість обертання колеса механізму пересування, об/хв, визначається за формулою
де
Значення діаметрів ходових коліс візків і мостів кранів вибирають, користуючись рекомендаціями [2, табл. 25]. Передавальне число редуктора механізму пересування, необхідне для розрахунку статичних моментів, знаходять за відомим співвідношенням
Таблиця 4 Допустиме прискорення механізмів пересування крана
За вибраною із табл. 4 величиною максимально допустимого вповільнення і фактичною лінійною швидкістю руху механізму νф знаходять час гальмування
де а – допустиме уповільнення, м/с2, а далі момент гальмування
де
ωκ – кутова швидкість обертання ходового колеса, рад/с; η – ККД механізму пересування; ір – передавальне число вибраного редуктора; Go – власна сила важкості механізму пересування, Н; rk – радіус ходового колеса, м; r – радіус цапфи колеса,м; μ – коефіцієнт тертя підшипників ходових коліс; f – коефіцієнт тертя хитання ходових коліс по рейках. Момент інерції мас, які рухаються поступово, кг·м2,
де m – маса механізму, що поступово рухається, кг. Вибір гальма і з’єднувальних муфт проводиться за даними [1] із використанням додатків, указаних у розділі 3.3.6. Таблиця 5 Технічні дані вибраних пускових опорів
Опори вибирають за раніше знайденими фактичними значеннями тривалого струму й опорами секцій, користуючись даними – при послідовному з’єднанні ланок секцій допустимий струм секцій визначається ланкою, що має найменший допустимий струм; – при паралельному з’єднанні ланок величина допустимого струму обмежується тою ланкою, в якій добуток її допустимого струму на опір має найменшу величину; – при змішаному з’єднанні ланок паралельно з’єднані ланки замінюються еквівалентними.
СПИСОК ЛІТЕРАТУРИ 1. Шефер О.В. Завдання та довідникові дані до курсового проекту з дисципліни Електропривод та автоматизація загальнопромислових механізмів для студентів усіх форм навчання напряму 6.050702 – Електромеханіка. – Полтава: ПолтНТУ, 2009. – 24 с. 2. Иванченко Ф.К. и др. Расчеты грузоподъемных и транспортных машин. – К.: Вища шк. Головное изд-во, 1978. – 576 с. 3. Ключев B.И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов. – M.: Энергия, 1980. – 360 с. 4. Соколов М.М. Автоматизированный электропривод общепромышленных механизмов. – M.: Энергия, 1976. – 486 с. 5. Крановое электрооборудование / Под ред. Α.Α. Рабиновича. – M.: Энергия, 1979.– 240 с. 6. Вешеневський С.Н. Характеристики двигателей в электроприводе. – Μ.: Энергия, 1977. – 432 с. 7. Шефер О.В. Методичні вказівки до лабораторного практикуму з курсу Електропривод та автоматизація загальнопромислових механізмів, частина 1 Електропривод постійного струму для студентів усіх форм навчання напряму 6.050702 – Електромеханіка. – Полтава: ПолтНТУ, 2010. – 34 с. 8. Шефер О.В. Методичні вказівки до лабораторного практикуму з курсу Електропривод та автоматизація загальнопромислових механізмів, частина 2 Електропривод змінного струму для студентів усіх форм навчання напряму 6.050702 – Електромеханіка. – Полтава: ПолтНТУ, 2009. – 54 с. 9. Типові програми для розрахунку електрообладнання механізмів пересування мостового крана. 10. Типові програми для розрахунку електрообладнання механізмів піднімання мостового крана. Додаток А Таблиця А.1 Початкові технічні дані для проектування
Продовження таблиці А. 1
Додаток Б
Міністерство освіти і науки, молоді та спорту України
Полтавський національний технічний університет імені Юрія Кондратюка
Кафедра автоматики та електропривода КУРСОВИЙ ПРОЕКТ
з дисципліни: “ Електропривод і автоматизація загальнопромислових механізмів ” на тему: “ Розрахунок автоматизованих електроприводів мостових кранів загального призначення ” АЕП 402.099.000 КП Виконав: студент групи 402-МЕ Степанюк О.В.
Перевірив: Шефер О.В.
Полтава 201_ Додаток В Зразок бланку завдання
Міністерство освіти і науки, молоді та спорту України ЗАВДАННЯ до курсового проектування студента групи 402-МЕ – Степанюка О.В. Варіант № 99 1. Тема проекту: «Розрахунок автоматизованих електроприводів мостових кранів загального призначення». 2. Строк здачі студентом закінченого проекту: “ ” 201 р. 3. По вхідним технічним даним мостового крану загального призначення, згідно варіанту, вимагається: 3.1.Розрахувати статичне навантаження та вибрати елементи кінематики механізмів крану. 3.2.Зробити попередній вибір потужності електродвигунів механізмів крану методом середньоквадратичного моменту або потужності. 3.3.Вибрати стандартні схеми управління електродвигунами механізмів крану при середньому числі включень в годину більш 120. Струм – змінний, напруга мережі Uм = 380 В. 3.4.Розрахувати величини ступенів пускових опорів, вибрати стандартні ящики опорів і скласти схему з’єднання їхніх елементів. 3.5.Розрахувати і побудувати природні та штучні характеристики електродвигуна механізму піднімання та пересування, порівняти отримані розрахункові характеристики з каталоговими. 3.6.Розрахувати та побудувати криві електромеханічних перехідних процесів S = f(t), M = f(t) при пуску електропривода механізму піднімання чи механізму пересування крану. 4. У графічну частину проекту внести: - електричну принципову схему електрообладнання крану з захисною панеллю (формат А1); - кінематичну схему мостового крану (формат А4); - навантажувальні та швидкісні діаграми механізму піднімання та одного з механізмів пересування (формат А4); - криві електромеханічних перехідних процесів S=f(t), M=f(t) при пуску електроприводу механізму крану (формат А4).
Керівник курсового проекту: _______________ Шефер О.В.
Прийняв до виконання: _______________ Степанюк О.В.
Дата видачі завдання: “_____”_____________201__р. Додаток Г
Зразок оформлення технічного завдання Механізм підйому крана
Механізм пересування моста
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 510; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.27.192 (0.014 с.) |

 (1)
(1) – лінійна швидкість барабана, м/с;
– лінійна швидкість барабана, м/с; – швидкість піднімання вантажу;
– швидкість піднімання вантажу; (2)
(2) – номінальна вага вантажу, що піднімається, Н;
– номінальна вага вантажу, що піднімається, Н; – вага вантажопідйомного пристрою, Н;
– вага вантажопідйомного пристрою, Н; – коефіцієнт корисної дії поліспаста (вибирається за таблицею 1).
– коефіцієнт корисної дії поліспаста (вибирається за таблицею 1). і
і  для різних режимів експлуатації механізму
для різних режимів експлуатації механізму (4)
(4) (5)
(5) – довжина каната, м;
– довжина каната, м; (6)
(6) – діаметр каната, мм.
– діаметр каната, мм. , діаметром каната
, діаметром каната 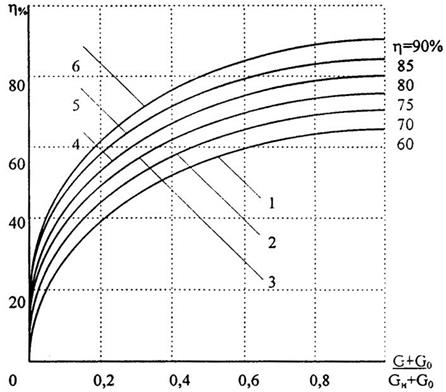
 при
при 
 (15)
(15) – ККД холостого ходу (G = 0), який визначається за кривою, згідно з номінальним ККД (див. рис. 1).
– ККД холостого ходу (G = 0), який визначається за кривою, згідно з номінальним ККД (див. рис. 1). (16)
(16) (17)
(17) . (18)
. (18) (19)
(19) (20)
(20) – тривалість роботи механізму в режимах піднімання і спускання при відповідних статичних моментах.
– тривалість роботи механізму в режимах піднімання і спускання при відповідних статичних моментах. .
. (21)
(21) (22)
(22) – коефіцієнт запасу, який враховує вплив динамічних навантажень;
– коефіцієнт запасу, який враховує вплив динамічних навантажень; – задана синхронна швидкість двигуна, рад/с;
– задана синхронна швидкість двигуна, рад/с; , (23)
, (23) – розрахункова потужність двигуна, відповідна стандартній тривалості ввімкнення ТВк, %;
– розрахункова потужність двигуна, відповідна стандартній тривалості ввімкнення ТВк, %; (24)
(24) – номінальна потужність вибраного за каталогом [5] двигуна, або із [1, дод. 14, 16 с. 17 – 21].
– номінальна потужність вибраного за каталогом [5] двигуна, або із [1, дод. 14, 16 с. 17 – 21]. (25)
(25) – передаточне число редуктора, розраховане за формулою (7);
– передаточне число редуктора, розраховане за формулою (7); – номінальна кутова швидкість двигуна, рад/с;
– номінальна кутова швидкість двигуна, рад/с; і заданим режимом роботи необхідно вибрати редуктор, користуючись працею [1, дод. 13, с. 15 – 17].
і заданим режимом роботи необхідно вибрати редуктор, користуючись працею [1, дод. 13, с. 15 – 17]. (26)
(26) – стандартне передавальне число вибраного редуктора.
– стандартне передавальне число вибраного редуктора. .
. (28)
(28) – швидкість пересування механізму, м/хв;
– швидкість пересування механізму, м/хв; – діаметр ходового колеса, м.
– діаметр ходового колеса, м. (29)
(29) (37)
(37) (38)
(38) – момент інерції привідного двигуна, кг·м2;
– момент інерції привідного двигуна, кг·м2; – номінальна кутова швидкість двигуна, рад/с;
– номінальна кутова швидкість двигуна, рад/с; – момент інерції мас механізму, які рухаються поступово, кг·м2;
– момент інерції мас механізму, які рухаються поступово, кг·м2; (39)
(39) 2
2
 22
22
 Зразок титульного аркуша
Зразок титульного аркуша


