
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематика вращательного движенияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
При поступательном движении тела все его точки движутся по одинаковым траекториям и в каждый данный момент они имеют равные скорости и равные ускорения. Поэтому поступательное движение тела задают движением какой-либо одной точки, обычно движением центра тяжести. Вращательное движение тела нельзя отождествить с движением какой-либо одной его точки. Различают следующие виды вращательного движения: вращение вокруг неподвижной оси, вращение вокруг свободных осей, вращение вокруг неподвижной точки – полюса (гироскопы, волчки), плоское движение (качение шара, цилиндра по горизонтальной поверхности). Будем рассматривать только вращение тела вокруг неподвижной оси. В этом случае ось вращающегося тела (маховика дизеля, ротора электродвигателя, шпинделя станка, лопастей вентилятора и т. п.) в процессе движения занимает в пространстве относительно окружающих неподвижных тел одно и то же место. Вращательным называется движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой – оси вращения. Вращение твердого тела описывается углом поворота φ(t), на который повернулось тело за время t. Угловая скорость w – векторная величина, характеризующая быстроту вращения тела, которая равна производной от угла поворота тела j по времени t:
.где dj – угол поворота тела за малое время dt.
Угловая скорость является псевдовектором. Вектор угловой скорости может быть приложен к любой точке мгновенной оси и направлен в каждый момент времени по мгновенной оси, так, чтобы, смотря навстречу этому вектору, видеть вращение тела происходящим против движения часовой стрелки (рис. 1).
Рис. 1. Равномерное вращательное движение Если угловая скорость ω = const, то вращательное движение называется равномерным. При равномерном вращении его быстроту также описывают частотой оборотов n и периодом вращения T. Частота оборотов nравна числу оборотов, сделанных за единицувремени,
.где N – число оборотов за время t. Т.к. за один оборот тело поворачивается на угол, равный 2p, то j= 2p× N и w = 2p× n Период вращения T – это время, за которое тело совершает один оборот. Т.к.
[ω] = рад/с, [ n ] = об/с, [T] = с Уравнение равномерного вращения имеет вид φ = φ0 + ω t. В частном случае, когда начальный угол поворота φ0 = 0, φ = ω t. Угловую скорость равномерно вращающегося тела ω = φ / t можно выразить и так: ω = 2π / T, .где: T – период вращения тела; φ = 2π – угол поворота за один период.
Неравномерное вращение Неравномерное вращение (угловая скорость изменяется со временем) характеризуется угловым ускорением e. Угловое ускорение
. где d ω – изменение угловой скорости за время dt. [e ]= Векторы
Рис. 2 Равнопеременное вращение Если угловое ускорение ε = const, то вращательное движение называется равнопеременным. Равнопеременное вращение характеризуется следующими уравнениями:
w 0 и j 0 – угловая скорость и угол поворота тела в начальный момент t 0 = 0, w и j – в момент времени t. При ускоренном вращении в этих уравнениях выбирается знак «+», а при замедленном – знак «–».
Связь линейных и угловых характеристик Если точка тела отстоит от оси вращения на расстоянии r, то за время dt она проходит путь dS = d j×r Скорость точки
При вращении тела тангенциальное ускорение его точки
a t =e×r Нормальное ускорение точки тела
/a n =w 2×r Полное ускорение, как указывалось ранее, определяют по формуле
Момент инерции Момент инерции - скалярная величина, характеризующая распределения масс в теле и являющаяся наряду с массой мерой инертности тела при непоступательном движении. Единица измерения СИ: кг·м². Обозначение: I или J. Момент инерции тела относительно оси вращения зависит от массы тела и от распределения этой массы относительно этой оси. Чем больше масса тела и чем дальше она отстоит от воображаемой оси, тем большим моментом инерции обладает тело. Момент инерции элементарной (точечной) массы mi, отстоящей от оси на расстоянии ri, равен: Ii = mi ri 2 Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
где: mi — масса i -й точки, ri — расстояние от i -й точки до оси.
где:
Если тело однородно, то есть его плотность всюду одинакова, то
Момент инерции твёрдого тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния а между осями: J = Jc + ma2.
Рис. 3 где Например, момент инерции стержня относительно оси, проходящей через его конец, равен: . Момент силы Момент силы, величина, характеризующая вращательный эффект силы при действии её на твёрдое тело; является одним из основных понятий механики. Различают момент силы относительно центра (точки - полюса) и относительно оси. Если имеется материальная точка О, к которой приложена сила
Рис. 4 Модуль момента силы: M = F•l = F•r•sin α, где: M – момент силы (Ньютон • метр), F – приложенная сила, /r – расстояние от центра вращения до места приложения силы, .l = r. sin α – плечо силы, т.е. длина перпендикуляра, опущенного из центра вращения на линию действия силы, α — угол, между вектором силы F и вектором положения r. Момент силы относительно оси величина алгебраическая, равная проекции на эту ось вектора М момента силы относительно любой точки О оси. Пользуясь понятием момента силы можно по-новому сформулировать условия равновесия тела, закрепленного на оси. Это условие называется правилом моментов: если на тело, закрепленное на оси, действует много сил, то для равновесия тела, закрепленного на оси, алгебраическая сумма моментов всех сил, действующих на тело, должна быть равна нулю: М1 + М2 + … + М n = 0. Считают момент силы положительным, если эта сила, действуя в отдельности, вращала бы тело по часовой стрелке, и отрицательным в противоположном случае (при этом нужно заранее условиться, с какой стороны мы будем смотреть на тело). Например, согласно рис.5, силам F1 и F2 следует приписать положительный момент, а силе F3— отрицательный.
Рис. 5. Момент импульса Момент импульса (кинетический момент, угловой момент, орбитальный момент, момент количества движения) характеризует количество вращательного движения. Следует учесть, что вращение здесь понимается в широком смысле, не только как регулярное вращение вокруг оси. Например, даже при прямолинейном движении тела мимо произвольной воображаемой точки, не лежащей на линии движения, оно также обладает моментом импульса. Наибольшую, пожалуй, роль момент импульса играет при описании собственно вращательного движения. Однако крайне важен и для гораздо более широкого класса задач (особенно — если в задаче есть центральная или осевая симметрия, но не только в этих случаях). Моментом импульса L материальной точки относительно произвольной точки О называется физическая величина, определяемая векторным произведением радиус-вектора r этой материальной точки, проведенного из точки О, на величину ее импульса p ( рис. 6):
где r – радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта, p – импульс частицы.
Рис.6. Если твердое тело, вращающееся вокруг некоторой неподвижной оси z, представить в виде совокупности элементарных масс, и спроектировать моменты импульсов всех этих элементарных масс на это направление, получим момент импульса тела L z относительно этой оси (L z – скалярная величина). Суммирование производим по всем элементарным массам m i(имеющим линейную скорость v i и радиус вращения r i), на которые разбивается тело. Так как v i=ω r i, где ω - угловая скорость вращения тела, а I =∑ m i r i2 - момент инерции тела относительно данной оси, тогда момент импульса тела относительно оси z равен: L z = ∑ m i v i r i = ∑ ω m i r i2 = ω ∑ m i r i2 = I z ω. В случае тела, вращающегося вокруг оси симметрии, векторы L и ω имеют одинаковое направление и тогда:
Продифференцируем выражение (1) по времени: .d L z / d t = I z dω / d t = I z e = M z, В итоге: L z / d t = d M z (2) Таким образом, производная по времени от момента импульса твердого тела относительно оси вращения равна моменту сил относительно той же оси: d L / dt = M (3) Из уравнения (3) видно, что если момент внешних сил, действующих на тело, равен нулю, то момент импульса тела остается постоянным. Если M = 0, то: dL/dt = 0 ⇒ L = const. (4) Выражение (4) представляет собой закон сохранения момента импульса: момент импульса замкнутой системы тел не меняется со временем, причем это утверждение справедливо для момента импульса, взятого относительно любой точки инерциальной системы отсчета. Этот закон выполняется только в инерциальных системах отсчета. Закон сохранения момента импульса – фундаментальный закон природы. Он связан со свойством симметрии пространства – его изотропностью, т.е. с инвариантностью физических законов относительно поворота замкнутой системы в пространстве на любой угол.
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 14558; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.014 с.) |

 ,
,

 , то
, то ,.
,. 
 1 - вектор, равный производной от угловой скорости w по времени t,
1 - вектор, равный производной от угловой скорости w по времени t,

 и
и  направлены по оси вращения тела. При ускоренном вращении тела направления векторов
направлены по оси вращения тела. При ускоренном вращении тела направления векторов 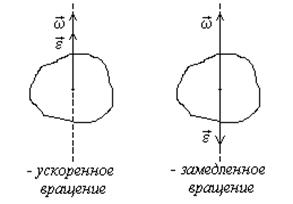
 и w = w0 + e t,
и w = w0 + e t, , или v = w×r
, или v = w×r , или
, или , или
, или


 — масса малого элемента объёма тела
— масса малого элемента объёма тела  ,
, — плотность,
— плотность, — расстояние от элемента
— расстояние от элемента 
















 — полная масса тела (рис. 3).
— полная масса тела (рис. 3).
 , то момент силы относительно этой точки равен векторному произведению радиус-вектора
, то момент силы относительно этой точки равен векторному произведению радиус-вектора  , соединяющего точку О и точку приложения силы, на вектор силы
, соединяющего точку О и точку приложения силы, на вектор силы  ., (Н•м).
., (Н•м). Момент силы — аксиальный вектор [4]. Он направлен вдоль оси вращения.
Момент силы — аксиальный вектор [4]. Он направлен вдоль оси вращения.
 (Дж•с),
(Дж•с),
 = I
= I  . (1)
. (1)


