Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Монтаж аппаратов безъякорным методомСодержание книги
Поиск на нашем сайте
Введение Монтаж вертикальных аппаратов и конструкций безъякорным методом с помощью самомонтирующего портала (шевра) является разновидностью монтажа оборудования химических и нефтехимических заводов поворотом вокруг шарнира с помощью такелажных средств. Основными преимуществами данного способа подъёма являются: 1) отсутствие расчалок, удерживающих портал в рабочем положении, а, следовательно, и якорей для их крепления; 2) возможность монтажа оборудования в стеснённых условиях монтажной площадки; 3) исключение затрат на установку и демонтаж портала; 4) отсутствие горизонтальных нагрузок на фундамент аппарата. Безъякорный способ применяется для установки оборудования на фундаменты высотой до 2-х м при соотношении диаметра (Д) и высоты (H) поднимаемого оборудования не менее 0,1 и достаточной прочности его при строповке вблизи центра тяжести на расстоянии 1÷2 м от него. Цель работы Определение усилия в такелажной оснастке при различных углах подъёма колонны с помощью самомонтирующегося портала.
Содержание работы Изучить кинематику подъёма колонного аппарата безъякорным методом. Провести экспериментальное исследование зависимости тягового усилия в грузовых полиспастах от угла наклона монтажного портала и колонны. Рассчитать по теоретическим зависимостям усилия в такелажной оснастке в процессе подъёма портала и аппарата и сопоставить их с опытными результатами.
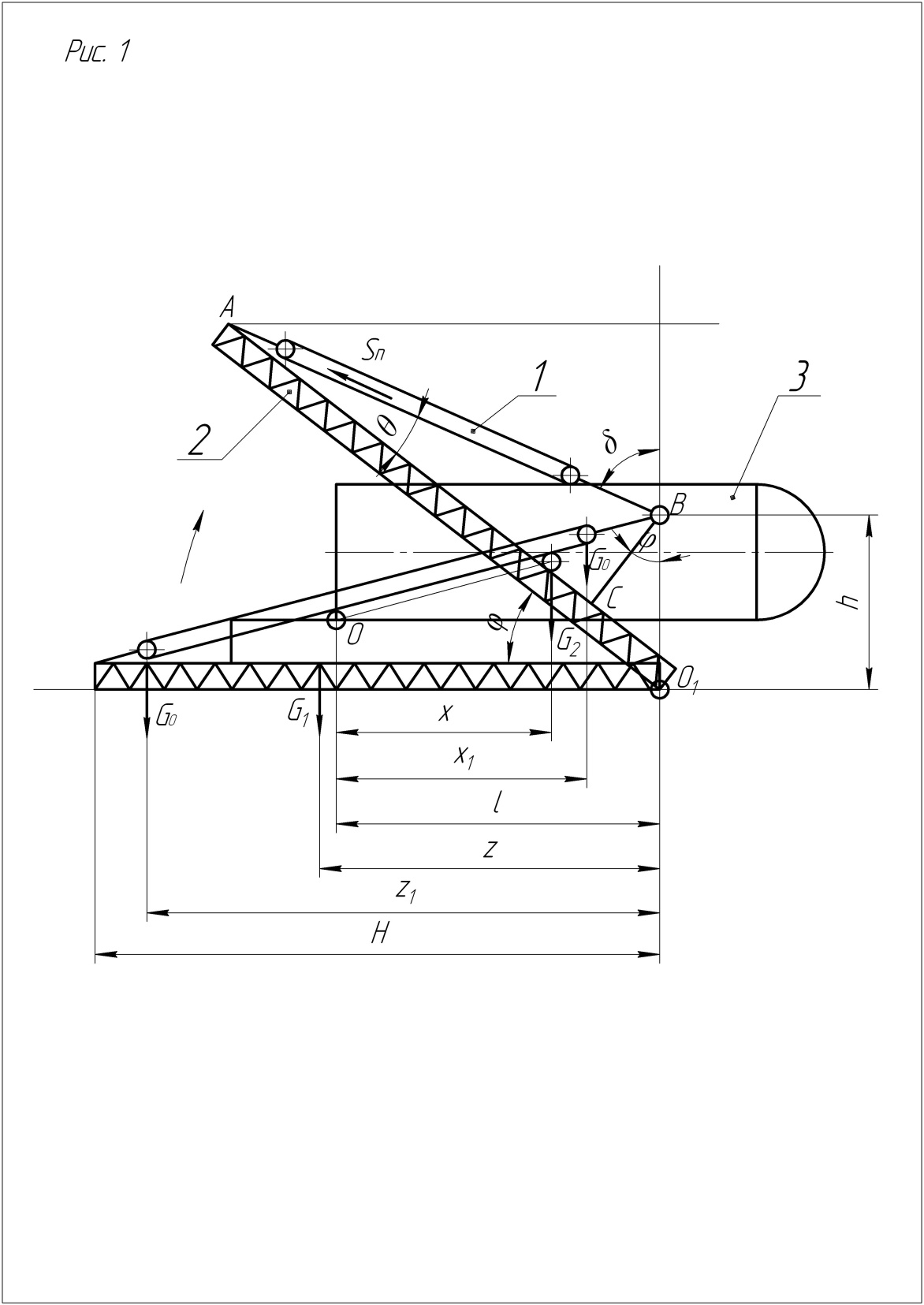
Теоретическая часть Кинематическая схема (рис. 1) подъёма аппаратов безъякорным методом представляет собой четырёхзвенный механизм. Ведущим звеном этого механизма является грузовой полиспаст 1, имеющий переменную длину; звеньями постоянной длины служат портал 2, поднимаемый аппарат 3 и земля. Возникающая при подъёме аппарата замкнутая система уравновешивающих сил исключает действие горизонтальных нагрузок на фундамент. Подъём вертикальных аппаратов и конструкций безъякорным способом производится следующим образом. Портал 2 устанавливается из горизонтального (рис. 1, а) в исходное (рис. 1, б) положение для подъёма оборудования с помощью грузовых полиспастов самого устройства. При этом поднимаемый аппарат 3 используется в качестве якоря. После отрыва от земли подъём аппарата производится за счёт натяжения тех же грузовых полиспастов. При подходе к положению неустойчивого равновесия системы аппарат-портал включают тормозную оттяжку и останавливают привод грузовых полиспастов. С помощью тормозной оттяжки плавно устанавливают аппарат на фундамент. После установки аппарата в вертикальное положение реверсом лебедки опускают портал на землю. Максимальные расчётные нагрузки на грузовые полиспасты портала, зависящие от соотношения весов портала и аппарата и соотношения их длин, могут возникнуть в начальный момент подъёма аппарата при положении портала, близкого к вертикальному.
а
б
|
||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 336; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.008 с.) |